Anda mungkin juga menyukai
- Regla de Tres SimpleDokumen4 halamanRegla de Tres SimpleBrayhan SánchezBelum ada peringkat
- Leccion 1 Nivel 4Dokumen6 halamanLeccion 1 Nivel 4Brayhan SánchezBelum ada peringkat
- Nivel 3 Lección 1Dokumen5 halamanNivel 3 Lección 1Brayhan Sánchez0% (2)
- Libro 1Dokumen28 halamanLibro 1Brayhan SánchezBelum ada peringkat
- Diagrama de Proceso-Análisis Del HombreDokumen4 halamanDiagrama de Proceso-Análisis Del HombreBrayhan Sánchez0% (2)
- Lección 3 Supervisor de OperacionesDokumen16 halamanLección 3 Supervisor de OperacionesBrayhan Sánchez67% (6)
- Evaluación Cualitativa (Anexo 6)Dokumen1 halamanEvaluación Cualitativa (Anexo 6)Brayhan SánchezBelum ada peringkat
- AsistenciaDokumen3 halamanAsistenciaBrayhan SánchezBelum ada peringkat
- 4.3 Misión y Visión de La CarreraDokumen1 halaman4.3 Misión y Visión de La CarreraBrayhan SánchezBelum ada peringkat
- Variador de VelocidadDokumen12 halamanVariador de VelocidadBrayhan SánchezBelum ada peringkat
- UNI-CHIMBORAZO Sílabo de Ingeniería de Métodos IDokumen9 halamanUNI-CHIMBORAZO Sílabo de Ingeniería de Métodos IBrayhan SánchezBelum ada peringkat
- Consulta ControlesDokumen14 halamanConsulta ControlesBrayhan SánchezBelum ada peringkat
- DIAGRAMA DEL FLUJO DE PROCESO DE DESMONTAJEDokumen2 halamanDIAGRAMA DEL FLUJO DE PROCESO DE DESMONTAJEBrayhan Sánchez100% (1)
- V1000Dokumen31 halamanV1000Vicpico PicosoBelum ada peringkat
- Cursograma AnaliticoDokumen1 halamanCursograma AnaliticoBrayhan SánchezBelum ada peringkat
- TrabajoDokumen3 halamanTrabajoBrayhan SánchezBelum ada peringkat
- Diagrma Hombre Maquina (Servicios)Dokumen2 halamanDiagrma Hombre Maquina (Servicios)Brayhan SánchezBelum ada peringkat
- Diagrama de Proceso Analisis Del ProductoDokumen5 halamanDiagrama de Proceso Analisis Del ProductoBrayhan SánchezBelum ada peringkat
- Toyota SDPDokumen7 halamanToyota SDPBrayhan SánchezBelum ada peringkat
- FISIOLOGIA DIGESTIVA EN AVES GRUPO N°04 FibraDokumen9 halamanFISIOLOGIA DIGESTIVA EN AVES GRUPO N°04 FibraBrayhan SánchezBelum ada peringkat
- G4-Contabilizacion Peps Metodo PromedioDokumen11 halamanG4-Contabilizacion Peps Metodo PromedioBrayhan SánchezBelum ada peringkat
- Diag H-MDokumen6 halamanDiag H-MBrayhan SánchezBelum ada peringkat
- Guía de AudioDokumen1 halamanGuía de AudioBrayhan SánchezBelum ada peringkat
- Fuerzas ConservativasDokumen3 halamanFuerzas ConservativasBrayhan SánchezBelum ada peringkat
- Ensayo Del CuidadoDokumen3 halamanEnsayo Del CuidadoBrayhan SánchezBelum ada peringkat
- FISIOLOGIA DIGESTIVA EN AVES GRUPO N°04 FibraDokumen9 halamanFISIOLOGIA DIGESTIVA EN AVES GRUPO N°04 FibraBrayhan SánchezBelum ada peringkat
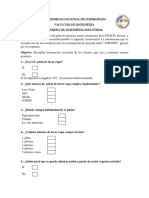
- Encuesta PilotoDokumen2 halamanEncuesta PilotoBrayhan SánchezBelum ada peringkat
- Proyecto SimuladoresDokumen12 halamanProyecto SimuladoresBrayhan SánchezBelum ada peringkat
- Sumas de RiemannDokumen11 halamanSumas de RiemannBrayhan SánchezBelum ada peringkat
- Consulta 3Dokumen5 halamanConsulta 3Brayhan SánchezBelum ada peringkat
- A Un Hombre Se Le Mide Por Sus ValoresDokumen2 halamanA Un Hombre Se Le Mide Por Sus ValoresLaura NiñoBelum ada peringkat
- Peritaje OficialDokumen19 halamanPeritaje OficialDaniela Rengifo MaldonadoBelum ada peringkat
- Derecho Administrativ1Dokumen8 halamanDerecho Administrativ1Yony GodoyBelum ada peringkat
- Contrato de Compraventa Vehiculo AutomotorDokumen2 halamanContrato de Compraventa Vehiculo AutomotorYasminGarcesCaceresBelum ada peringkat
- Reglamento DCC DefinitivoDokumen89 halamanReglamento DCC DefinitivoEmilse MargyBelum ada peringkat
- Tarea Mercado de Capital Semana 2Dokumen4 halamanTarea Mercado de Capital Semana 2Esdras MartinezBelum ada peringkat
- Inicio de Demanda de Proceso LaboralDokumen15 halamanInicio de Demanda de Proceso LaboralBriggit Estefani Tinoco BlacidoBelum ada peringkat
- ConciliosDokumen8 halamanConcilioslester96Belum ada peringkat
- Corrupcion en El Sector de SaludDokumen36 halamanCorrupcion en El Sector de SaludPaolita VilchezBelum ada peringkat
- El Juramento Del Grado 9noDokumen3 halamanEl Juramento Del Grado 9noRafael Viaje100% (2)
- Contestacion Demanda Nulidad y Restablecimiento de DerechosDokumen29 halamanContestacion Demanda Nulidad y Restablecimiento de DerechosChangoBelum ada peringkat
- Objeto de La PruebaDokumen11 halamanObjeto de La PruebaKenshiShinjiGerberBelum ada peringkat
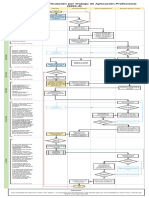
- Diagrama de Flujo - Titulación Por Trabajo de Aplicación Profesional (2021-2)Dokumen1 halamanDiagrama de Flujo - Titulación Por Trabajo de Aplicación Profesional (2021-2)JOSE ARMANDO LUPACA QUISPEBelum ada peringkat
- Material 2016I3 SRB086 13 65880Dokumen24 halamanMaterial 2016I3 SRB086 13 65880Jessy vallejoBelum ada peringkat
- Teoria de La SeguridadDokumen43 halamanTeoria de La Seguridadalevaldezp100% (2)
- Tupac PDFDokumen395 halamanTupac PDFJavier Ramirez AzañeroBelum ada peringkat
- Agenda IV Encuentro de Investigación ACIET CaribeDokumen4 halamanAgenda IV Encuentro de Investigación ACIET CaribeCalidad InstitucionalBelum ada peringkat
- Caso Internacional Del 10.1 Capitulo 10Dokumen8 halamanCaso Internacional Del 10.1 Capitulo 10drbetioBelum ada peringkat
- 8 de Octubre 2010 BuenoDokumen79 halaman8 de Octubre 2010 BuenoCAZADOR DE LA VERDADBelum ada peringkat
- Apelacion de CesarDokumen10 halamanApelacion de CesarCristianAntonyR.Bobadilla100% (1)
- ShariaDokumen3 halamanShariaEduardo CrespoBelum ada peringkat
- Abordaje Del Tema Mujer en Radio, Prensa y TelevisiónDokumen67 halamanAbordaje Del Tema Mujer en Radio, Prensa y TelevisiónEdwin MijangosBelum ada peringkat
- Definicion de Infraccion PenalDokumen2 halamanDefinicion de Infraccion PenalORLANDO CASTILLO100% (1)
- Denuncia PenalDokumen4 halamanDenuncia PenalGrover Mamani PacoriBelum ada peringkat
- Resolucion de Ejercicio de Planificacion 2021Dokumen7 halamanResolucion de Ejercicio de Planificacion 2021Oliver Claros JaldinBelum ada peringkat
- 4894-2012 Control de Legalidad Detención en Audiencia de PrisiónDokumen31 halaman4894-2012 Control de Legalidad Detención en Audiencia de PrisiónClaudia Echeverry CastroBelum ada peringkat
- Juan Bosch Primeras Elecciones Libres Después de La Muerte de Trujillo 6toDokumen7 halamanJuan Bosch Primeras Elecciones Libres Después de La Muerte de Trujillo 6toAshley Carolina Pérez MéndezBelum ada peringkat
- ResoluciomDokumen2 halamanResoluciomoscar leeBelum ada peringkat
- Hospital de PedernalesDokumen60 halamanHospital de PedernalesRosita ZambranoBelum ada peringkat
- Pueblos Indigenas en Aislamiento y Contacto InicialDokumen3 halamanPueblos Indigenas en Aislamiento y Contacto InicialJOSHUA DANIEL ARAPA BUDIELBelum ada peringkat