Anda mungkin juga menyukai
- Underwater Sound PrinciplesDokumen43 halamanUnderwater Sound PrinciplesParviz GhadimiBelum ada peringkat
- Ground Studies For Pilots Radio AidsDokumen232 halamanGround Studies For Pilots Radio AidsJ'boy Jacob100% (3)
- General Arrangement DockingPlanDokumen3 halamanGeneral Arrangement DockingPlaniris2326Belum ada peringkat
- Waves and LightDokumen21 halamanWaves and LightTheEinsteinofTomorrowBelum ada peringkat
- Doppler Effect ExplainedDokumen8 halamanDoppler Effect ExplainedkrawczybBelum ada peringkat
- 7.1.1 Progressive Waves: Wave MotionDokumen80 halaman7.1.1 Progressive Waves: Wave MotionFarhan Sadique100% (1)
- Soil ESE NotejDokumen34 halamanSoil ESE NotejTarun100% (3)
- Physics Form 5 Chapter 1Dokumen39 halamanPhysics Form 5 Chapter 1Leong Laichuo40% (5)
- Factors Affecting SolubilityDokumen2 halamanFactors Affecting SolubilityTerence FocasanBelum ada peringkat
- Artificial Lift Methods ComparisonsDokumen6 halamanArtificial Lift Methods ComparisonshamadahutpBelum ada peringkat
- DAY 10 Electronic Speed LogDokumen51 halamanDAY 10 Electronic Speed LogSto Cu100% (4)
- Control Valve CharacteristicsDokumen65 halamanControl Valve CharacteristicsAzar DeenBelum ada peringkat
- Waves NotesDokumen13 halamanWaves NotescgozzardBelum ada peringkat
- How Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksDari EverandHow Do Waves Behave? How Are They Measured? Physics Lessons for Kids | Children's Physics BooksBelum ada peringkat
- Ship Speed LogDokumen32 halamanShip Speed Logcaptpkkhare100% (1)
- Doppler Effect ExplainedDokumen16 halamanDoppler Effect ExplainedRamya RBelum ada peringkat
- LogsDokumen46 halamanLogsGopu ThalikunnathBelum ada peringkat
- Doppler Log NotesDokumen4 halamanDoppler Log Notesss_tayade100% (1)
- 8A Doppler Log NotesDokumen4 halaman8A Doppler Log NotesRaghav Sood100% (1)
- Wave NotesDokumen7 halamanWave Notesapi-422428700Belum ada peringkat
- Speed LogDokumen23 halamanSpeed LogSwapnil Suhrid Joshi60% (5)
- Introductory Guide To Glass-Lined Steel EquipmentDokumen8 halamanIntroductory Guide To Glass-Lined Steel EquipmentMahmoud Al HomranBelum ada peringkat
- Doppler LogDokumen6 halamanDoppler LogAhmed Wagdy MohmedBelum ada peringkat
- BRM 2 - Doppler Log-1Dokumen3 halamanBRM 2 - Doppler Log-1AllenBelum ada peringkat
- DopplerEffect PDFDokumen5 halamanDopplerEffect PDFNeelam KapoorBelum ada peringkat
- Mechanical Waves Doppler Effect and Its Application in MedicineDokumen15 halamanMechanical Waves Doppler Effect and Its Application in MedicineMohammod Saimon NehaliBelum ada peringkat
- As 23a WavesDokumen42 halamanAs 23a WavesHany ElGezawyBelum ada peringkat
- Wave Motion and SoundDokumen8 halamanWave Motion and SoundyididiyayibBelum ada peringkat
- Doppler Effect Visual Physics OnlineDokumen19 halamanDoppler Effect Visual Physics OnlineSam lama100% (1)
- Lec-4 - Measurement of Flow Using AnemometryDokumen21 halamanLec-4 - Measurement of Flow Using Anemometrysri7877Belum ada peringkat
- Doppler Effect: On The Coloured Light of The Binary Stars and Some Other Stars of The HeavensDokumen10 halamanDoppler Effect: On The Coloured Light of The Binary Stars and Some Other Stars of The Heavensharshit tiwariBelum ada peringkat
- General Wave Properties PPT Notes Olevel PhysicsDokumen33 halamanGeneral Wave Properties PPT Notes Olevel PhysicsMeerab FatimaBelum ada peringkat
- Wave Length and Frequency Review NotesDokumen4 halamanWave Length and Frequency Review NotesLukasBelum ada peringkat
- Range & Doppler Accuracy in 40 CharactersDokumen11 halamanRange & Doppler Accuracy in 40 CharactersRamya RBelum ada peringkat
- General Properties OF WavesDokumen19 halamanGeneral Properties OF WavesMinecraft Hacker GamerBelum ada peringkat
- Speed LogDokumen3 halamanSpeed Logzul fadliBelum ada peringkat
- WaveDokumen79 halamanWaveMiman RanaBelum ada peringkat
- Doppler-Effect: MTI - Moving Target IndicationDokumen6 halamanDoppler-Effect: MTI - Moving Target IndicationBilal ShahidBelum ada peringkat
- Doppler effect - okDokumen66 halamanDoppler effect - okAntonioBelum ada peringkat
- Physics Report DraftDokumen19 halamanPhysics Report DraftViola Voon Li WeiBelum ada peringkat
- Doppler EffectDokumen4 halamanDoppler EffectTheo MolotoBelum ada peringkat
- Gradeup - PDF 34Dokumen13 halamanGradeup - PDF 34Imran AhmadBelum ada peringkat
- Unit 02-Lecture 03Dokumen6 halamanUnit 02-Lecture 03Harshan SBelum ada peringkat
- Basic WaveDokumen81 halamanBasic WaveSONG YING XIN MoeBelum ada peringkat
- Doppler Effect Explained in 40 CharactersDokumen22 halamanDoppler Effect Explained in 40 CharactersFrooti DubeyBelum ada peringkat
- Rlec - 4 Wave ResDokumen54 halamanRlec - 4 Wave ResAnkit RajaBelum ada peringkat
- Lesson 6.2Dokumen10 halamanLesson 6.2Tok PutihBelum ada peringkat
- WavesDokumen120 halamanWavestrickster jonasBelum ada peringkat
- TG Science 9Dokumen41 halamanTG Science 9Norweena QuinonesBelum ada peringkat
- SPEED LOG: Understanding Doppler Speed MeasurementDokumen23 halamanSPEED LOG: Understanding Doppler Speed MeasurementSathish KumarBelum ada peringkat
- Mode Conversion: Understanding Wave Interactions at Material InterfacesDokumen15 halamanMode Conversion: Understanding Wave Interactions at Material Interfacescal2_uniBelum ada peringkat
- Doppler ShiftDokumen9 halamanDoppler Shiftkumar1968Belum ada peringkat
- Doppler Effect: WavelengthDokumen6 halamanDoppler Effect: WavelengthshohobiBelum ada peringkat
- Waves: Reviewed By: Ivan Lebedev and Yin SoongDokumen10 halamanWaves: Reviewed By: Ivan Lebedev and Yin SoongMohan KumarBelum ada peringkat
- WavesDokumen19 halamanWavesNAVEED AHMEDBelum ada peringkat
- Doppler Effect For Sound: and Review of WaveDokumen25 halamanDoppler Effect For Sound: and Review of WaveSHEENA MAE DALGUNTASBelum ada peringkat
- Experiment 3.8 Doppler EffectDokumen5 halamanExperiment 3.8 Doppler EffectAman KumarBelum ada peringkat
- Coherence Is A Property Of: Waves Interfere PhaseDokumen11 halamanCoherence Is A Property Of: Waves Interfere PhaseAkhtar AnjumBelum ada peringkat
- Lesson 6.2 Physics F5Dokumen10 halamanLesson 6.2 Physics F5Siti Arbaiyah AhmadBelum ada peringkat
- Doppler EffectDokumen1 halamanDoppler EffectMaybe Daily GamingBelum ada peringkat
- Lecture03 Mechanical WavesDokumen3 halamanLecture03 Mechanical WavesVICTORIA OMEGA JARAMILLABelum ada peringkat
- IB - PHYSICS (AHL) - Wave Phenomena: Topic 11.1 Standing WavesDokumen8 halamanIB - PHYSICS (AHL) - Wave Phenomena: Topic 11.1 Standing WavesAshisBelum ada peringkat
- WavesDokumen5 halamanWavesGedeon PagaduanBelum ada peringkat
- Super PositionDokumen5 halamanSuper PositionAmirMozammelBelum ada peringkat
- When Do People Prefer Carrots To SticksDokumen17 halamanWhen Do People Prefer Carrots To Sticksiris2326Belum ada peringkat
- Are Good-Looking People More EmployableDokumen18 halamanAre Good-Looking People More Employableiris2326Belum ada peringkat
- When Do People Prefer Carrots To SticksDokumen17 halamanWhen Do People Prefer Carrots To Sticksiris2326Belum ada peringkat
- When Do People Prefer Carrots To SticksDokumen17 halamanWhen Do People Prefer Carrots To Sticksiris2326Belum ada peringkat
- MerchantDokumen2 halamanMerchantiris2326Belum ada peringkat
- A 890 Safe ManningDokumen12 halamanA 890 Safe ManningNicholas NaidaBelum ada peringkat
- Homer - The Odyssey (Nagles)Dokumen301 halamanHomer - The Odyssey (Nagles)gaby31juanBelum ada peringkat
- Ordinance No. 8 of 1879 HKDokumen86 halamanOrdinance No. 8 of 1879 HKiris2326Belum ada peringkat
- Protection Indemnity HK 2002Dokumen6 halamanProtection Indemnity HK 2002Anonymous qT66pyKBelum ada peringkat
- The Odyssey PDFDokumen335 halamanThe Odyssey PDFiris2326Belum ada peringkat
- MSC 86/26/Add.1 ANNEX 1 RESOLUTION MSC.282(86) (adopted on 5 June 2009) ADOPTION OF AMENDMENTS TO THE INTERNATIONAL CONVENTION FOR THE SAFETY OF LIFE AT SEA, 1974Dokumen5 halamanMSC 86/26/Add.1 ANNEX 1 RESOLUTION MSC.282(86) (adopted on 5 June 2009) ADOPTION OF AMENDMENTS TO THE INTERNATIONAL CONVENTION FOR THE SAFETY OF LIFE AT SEA, 1974usankoBelum ada peringkat
- TP2072EDokumen34 halamanTP2072EAnonymous j3WOutBelum ada peringkat
- Health and Safety Policy ProgrammesDokumen23 halamanHealth and Safety Policy Programmesiris2326Belum ada peringkat
- Ism Code 2008Dokumen10 halamanIsm Code 2008iris2326Belum ada peringkat
- Cost & Management Accounting - MGT402 Power Point Slides Lecture 01Dokumen27 halamanCost & Management Accounting - MGT402 Power Point Slides Lecture 01iris2326Belum ada peringkat
- 6115-Article Text-19834-2-10-20200803 PDFDokumen29 halaman6115-Article Text-19834-2-10-20200803 PDFAshaari Cha-eBelum ada peringkat
- ONLINE NET - JRF Test Series June - 2021Dokumen3 halamanONLINE NET - JRF Test Series June - 2021paresh kumar sahooBelum ada peringkat
- IAL - Chemistry - SB2 - Mark Scheme - T18Dokumen2 halamanIAL - Chemistry - SB2 - Mark Scheme - T18salmaBelum ada peringkat
- Product Data Sheet DRE80 EPDM Rubber SheetDokumen1 halamanProduct Data Sheet DRE80 EPDM Rubber Sheetvivashwanth paiBelum ada peringkat
- Mapua University: School of Chemical, Biological, Material Engineering and Sciences (CBMES)Dokumen9 halamanMapua University: School of Chemical, Biological, Material Engineering and Sciences (CBMES)April Lyn LimbocBelum ada peringkat
- AUDI OptimizationDokumen37 halamanAUDI OptimizationKiran DamaBelum ada peringkat
- Pressure Vessel Plates, Alloy Steel, Quenched and Tempered Nickel-Chromium-MolybdenumDokumen3 halamanPressure Vessel Plates, Alloy Steel, Quenched and Tempered Nickel-Chromium-MolybdenumluisBelum ada peringkat
- SCIE 10 - Chapter 1Dokumen3 halamanSCIE 10 - Chapter 1Crishia joy J. EstrellaBelum ada peringkat
- 7654-006-1 bd05022 - LTB 145D11 - 0,5g IECDokumen22 halaman7654-006-1 bd05022 - LTB 145D11 - 0,5g IECOscar Francisco Astudillo PaillamillaBelum ada peringkat
- Boiling Heat Transfer FundamentalsDokumen11 halamanBoiling Heat Transfer FundamentalsOtto Heinrich WehmannBelum ada peringkat
- Tutorial 3Dokumen2 halamanTutorial 3pradeepBelum ada peringkat
- 6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesDokumen14 halaman6 - Engesser's Theorem and Truss Deflections by Virtual Work PrinciplesFrans Alen SarmientoBelum ada peringkat
- BiosensorsDokumen60 halamanBiosensorsRahul SinghBelum ada peringkat
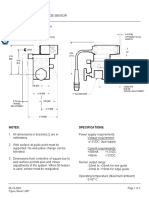
- Installation of the SE-26A Line Guide SensorDokumen2 halamanInstallation of the SE-26A Line Guide SensorDeniMestiWidiantoBelum ada peringkat
- Technical Data Sheet: Rheological Additive For Water Borne SystemDokumen2 halamanTechnical Data Sheet: Rheological Additive For Water Borne SystemAkshai RedwalkerBelum ada peringkat
- Thesis ReportDokumen51 halamanThesis ReportSøüRãv JãløTrã100% (1)
- API 653 Effectivity SheetDokumen1 halamanAPI 653 Effectivity SheetIsmail MemonBelum ada peringkat
- Abstract - Fatigue Behavior in Strain Cycling in The Low and Intermediate Cycle RangeDokumen55 halamanAbstract - Fatigue Behavior in Strain Cycling in The Low and Intermediate Cycle RangeZarra FaktBelum ada peringkat
- Variable Area TrainingDokumen12 halamanVariable Area TrainingRexCrazyMindBelum ada peringkat
- Project CV AxleDokumen19 halamanProject CV AxleSalman HaideriiBelum ada peringkat
- Plastistrength™: Acrylic Process Aids For PVC ApplicationsDokumen28 halamanPlastistrength™: Acrylic Process Aids For PVC ApplicationsJaved Iqbal100% (1)
- Conservation of angular momentum examplesDokumen4 halamanConservation of angular momentum examplesidraumrBelum ada peringkat
- CTA Chillers Industrial Water ChillersDokumen1 halamanCTA Chillers Industrial Water Chillersagyapongsamuel93Belum ada peringkat
- Solutions Manual Chapter10Dokumen41 halamanSolutions Manual Chapter10linearequBelum ada peringkat
- March Of: The MachinesDokumen4 halamanMarch Of: The MachinesParisa M.Belum ada peringkat