Anda mungkin juga menyukai
- Caracteristicas Motores PDFDokumen60 halamanCaracteristicas Motores PDF0ZKRCITHOBelum ada peringkat
- CSK2Dokumen20 halamanCSK2呂宗原Belum ada peringkat
- Ax MS PDFDokumen2 halamanAx MS PDFClaudiuMaxmiucBelum ada peringkat
- 30Dokumen18 halaman30richard anishBelum ada peringkat
- MDX A and Compact To MDXB (En)Dokumen21 halamanMDX A and Compact To MDXB (En)Josmar GuidinoBelum ada peringkat
- Yaskawa Manuals 212Dokumen31 halamanYaskawa Manuals 212Pham LongBelum ada peringkat
- Drum Motor 80SDokumen5 halamanDrum Motor 80SManekGorisBelum ada peringkat
- SIM Holland Onan Cummins Onan Marine Pocket GuideDokumen32 halamanSIM Holland Onan Cummins Onan Marine Pocket GuideMarine CoreBelum ada peringkat
- Uci224d PDFDokumen8 halamanUci224d PDFRanu JanuarBelum ada peringkat
- Electrical One Line DiagDokumen5 halamanElectrical One Line DiagdownloadizBelum ada peringkat
- Ac Crane ControlDokumen28 halamanAc Crane ControlErc Nunez VBelum ada peringkat
- DC Motor DriveDokumen1 halamanDC Motor DrivealaxyadBelum ada peringkat
- Control Boxes Cat PagesDokumen8 halamanControl Boxes Cat PagesLuis Elí Silva ValdiviaBelum ada peringkat
- Price ListDokumen30 halamanPrice ListJagadeesh PalavalasaBelum ada peringkat
- 6121 Catalog DC Crane ControlDokumen30 halaman6121 Catalog DC Crane ControlcenicercBelum ada peringkat
- 04 LG7 StarteriDokumen108 halaman04 LG7 StarteriAbhijeet DurgeBelum ada peringkat
- GE Power Management: Modular Voltage RelaysDokumen27 halamanGE Power Management: Modular Voltage Relaysnabil160874Belum ada peringkat
- Driver DFC MotorDokumen24 halamanDriver DFC Motorda.dientuhnBelum ada peringkat
- LCD Display VID29 - Manual - EN-080606Dokumen10 halamanLCD Display VID29 - Manual - EN-080606RacielMCBelum ada peringkat
- Hagglunds Viking MK 64 163000 Bo LN 0100 PDFDokumen26 halamanHagglunds Viking MK 64 163000 Bo LN 0100 PDFKOSTAS100% (1)
- NPM ptm24h SpecsheetDokumen1 halamanNPM ptm24h SpecsheetElectromateBelum ada peringkat
- O5bt25 (1) SY-5BTDokumen2 halamanO5bt25 (1) SY-5BTtermoplaneBelum ada peringkat
- Lo-Cog DC Servo Motors: Series 8000Dokumen20 halamanLo-Cog DC Servo Motors: Series 8000papaandiBelum ada peringkat
- MotorDokumen48 halamanMotorHernan CuevasBelum ada peringkat
- HanbellRC2 TM ManualDokumen109 halamanHanbellRC2 TM Manualdcallahanmasonbarry100% (3)
- Stamford PM734F-Wdg 28 4 Pole 6 Wire Technical Data SheetDokumen6 halamanStamford PM734F-Wdg 28 4 Pole 6 Wire Technical Data SheetKVRamananBelum ada peringkat
- LG L1511S Chassis CL32Dokumen28 halamanLG L1511S Chassis CL32Jose AlbertoBelum ada peringkat
- Camco Na B RDM 082009Dokumen14 halamanCamco Na B RDM 082009Lucas RolanBelum ada peringkat
- Sevcon SC2000 Manual - With Calibrator Section PDFDokumen58 halamanSevcon SC2000 Manual - With Calibrator Section PDFRicardo Marquez ValenciaBelum ada peringkat
- ST7565PDokumen71 halamanST7565PsureshotstudioBelum ada peringkat
- Motor Catalog EN20190620 A6LDokumen69 halamanMotor Catalog EN20190620 A6LThai SalemBelum ada peringkat
- 3-Phase Stepping Motor VRDM 39x: Document: 100000116 Edition: d013, 2005.02Dokumen15 halaman3-Phase Stepping Motor VRDM 39x: Document: 100000116 Edition: d013, 2005.02TRAN TANBelum ada peringkat
- Section 8 (Recovery & Sorting) : Screens S8-S12Dokumen26 halamanSection 8 (Recovery & Sorting) : Screens S8-S12obedBelum ada peringkat
- Vexta Motor BrochureDokumen56 halamanVexta Motor BrochureSandy KohlndorferBelum ada peringkat
- Texas Instruments TSB83AA22AZAJ1418Dokumen25 halamanTexas Instruments TSB83AA22AZAJ1418pepegotera454Belum ada peringkat
- Otis Mcs 220c Gen2Dokumen96 halamanOtis Mcs 220c Gen2krp85734982% (49)
- Catalogue Card: Piston Type Steering GearsDokumen10 halamanCatalogue Card: Piston Type Steering GearsSenol SeidaliBelum ada peringkat
- ST7565R DatasheetDokumen72 halamanST7565R DatasheetRaissan ChedidBelum ada peringkat
- Low Voltage Final Distribution Products: Price ListDokumen30 halamanLow Voltage Final Distribution Products: Price ListAnonymous ufMAGXcskMBelum ada peringkat
- UCM224D - Technical Data SheetDokumen8 halamanUCM224D - Technical Data Sheet3efooBelum ada peringkat
- MAX1858 Evaluation Kit: General Description FeaturesDokumen7 halamanMAX1858 Evaluation Kit: General Description Features9183290782Belum ada peringkat
- 04 AirCircuitBreakerACBDokumen20 halaman04 AirCircuitBreakerACBtomi tintiaBelum ada peringkat
- YEG2 SDokumen2 halamanYEG2 Swpt_meBelum ada peringkat
- Villiers Engine Type DataDokumen4 halamanVilliers Engine Type DataPacoBelum ada peringkat
- UCM224CDokumen8 halamanUCM224C3efooBelum ada peringkat
- GEK-105281B (Guia de Seleccion de Motores)Dokumen4 halamanGEK-105281B (Guia de Seleccion de Motores)Erick Daniel Toyo MarinBelum ada peringkat
- LG Cl-18 Lb563t 563le Lb563t-Gr-gt TFT LCD Full 730Dokumen26 halamanLG Cl-18 Lb563t 563le Lb563t-Gr-gt TFT LCD Full 730Fidel ArroyoBelum ada peringkat
- Atv312 Quick Start en S1a10942 01Dokumen4 halamanAtv312 Quick Start en S1a10942 01Auliya UrrochmanBelum ada peringkat
- FuelPurifier WestfaliaDokumen193 halamanFuelPurifier WestfaliaHorst100% (2)
- UDN6118ADokumen8 halamanUDN6118AkizonzBelum ada peringkat
- SEW MOVITRAC 31C Crane Control ManualDokumen25 halamanSEW MOVITRAC 31C Crane Control ManualRoman JambrekBelum ada peringkat
- DELTA - IA-MDS - VFD-EL - C - EN - 20210420 MICRO DriveDokumen12 halamanDELTA - IA-MDS - VFD-EL - C - EN - 20210420 MICRO DriveJulian Ruiz SalazarBelum ada peringkat
- User Manual: HGM6310D/6320D Auto Start ModuleDokumen35 halamanUser Manual: HGM6310D/6320D Auto Start ModuleVaam Group sasBelum ada peringkat
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDari EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkBelum ada peringkat
- Variable Speed AC Drives with Inverter Output FiltersDari EverandVariable Speed AC Drives with Inverter Output FiltersBelum ada peringkat
- 110 Waveform Generator Projects for the Home ConstructorDari Everand110 Waveform Generator Projects for the Home ConstructorPenilaian: 4 dari 5 bintang4/5 (1)
- DC Motors, Speed Controls, Servo Systems: An Engineering HandbookDari EverandDC Motors, Speed Controls, Servo Systems: An Engineering HandbookPenilaian: 5 dari 5 bintang5/5 (3)
- (IJCST-V4I4P3) :reema Patel, A.N.Shewale, C.S.PatilDokumen3 halaman(IJCST-V4I4P3) :reema Patel, A.N.Shewale, C.S.PatilEighthSenseGroupBelum ada peringkat
- 2 Suku - Mar o Automatic PDFDokumen4 halaman2 Suku - Mar o Automatic PDFsuraj dhulannavarBelum ada peringkat
- E RationingDokumen3 halamanE Rationingsuraj dhulannavarBelum ada peringkat
- Analysis of Vibration Damping in Machine ToolsDokumen6 halamanAnalysis of Vibration Damping in Machine Toolssuraj dhulannavarBelum ada peringkat
- 199 Iphv7i3008xDokumen7 halaman199 Iphv7i3008xsuraj dhulannavarBelum ada peringkat
- 03 e Pipetube en WebDokumen18 halaman03 e Pipetube en Websuraj dhulannavarBelum ada peringkat
- Wind Driven Mobile Charging of Automobile BatteryDokumen7 halamanWind Driven Mobile Charging of Automobile Batterysuraj dhulannavarBelum ada peringkat
- FrameDokumen1 halamanFramesuraj dhulannavarBelum ada peringkat
- D e S I G N o F A N A U T o M A T e D S o R T I N G o F o B J e C T R e J e C T I o N A N D C o U N T I N G M A C H I N eDokumen13 halamanD e S I G N o F A N A U T o M A T e D S o R T I N G o F o B J e C T R e J e C T I o N A N D C o U N T I N G M A C H I N esuraj dhulannavarBelum ada peringkat
- 1:1 XXX A1: Toshavi PCDokumen1 halaman1:1 XXX A1: Toshavi PCsuraj dhulannavarBelum ada peringkat
- 1:1 XXX A1: Designed By: DateDokumen1 halaman1:1 XXX A1: Designed By: Datesuraj dhulannavarBelum ada peringkat
- Visvesvaraya Technological University BelgaumDokumen2 halamanVisvesvaraya Technological University Belgaumsuraj dhulannavarBelum ada peringkat
- 44 Tapsa Mech 006Dokumen9 halaman44 Tapsa Mech 006suraj dhulannavarBelum ada peringkat
- 1:1 XXX A4: Designed By: DateDokumen1 halaman1:1 XXX A4: Designed By: Datesuraj dhulannavarBelum ada peringkat
- 55Dokumen3 halaman55md junuBelum ada peringkat
- FrameDokumen1 halamanFramesuraj dhulannavarBelum ada peringkat
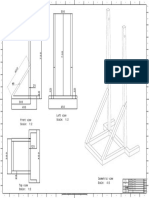
- Left View Scale: 1:2: 1:1 XXX A0Dokumen1 halamanLeft View Scale: 1:2: 1:1 XXX A0suraj dhulannavarBelum ada peringkat
- 1:1 XXX A1: Toshavi 5/3/2016Dokumen1 halaman1:1 XXX A1: Toshavi 5/3/2016suraj dhulannavarBelum ada peringkat
- 5Dokumen4 halaman5suraj dhulannavarBelum ada peringkat
- Dam Shutter Control Using Servo MotorDokumen3 halamanDam Shutter Control Using Servo MotorkarthikBelum ada peringkat
- M.H.Saboo Siddik PolytechnicDokumen5 halamanM.H.Saboo Siddik Polytechnicsuraj dhulannavarBelum ada peringkat
- 437NDokumen8 halaman437Nsuraj dhulannavarBelum ada peringkat
- FrameDokumen1 halamanFramesuraj dhulannavarBelum ada peringkat
- WWW Mechengg Net 2015 09 Design and Fabrication of InjectionDokumen17 halamanWWW Mechengg Net 2015 09 Design and Fabrication of Injectionsuraj dhulannavarBelum ada peringkat
- MSHDokumen20 halamanMSHsuraj dhulannavar100% (1)
- 1:1 XXX A1: Toshavi 5/3/2016Dokumen1 halaman1:1 XXX A1: Toshavi 5/3/2016suraj dhulannavarBelum ada peringkat
- 1:1 XXX A4: Designed By: DateDokumen1 halaman1:1 XXX A4: Designed By: Datesuraj dhulannavarBelum ada peringkat
- 1:1 XXX A1: Designed By: DateDokumen1 halaman1:1 XXX A1: Designed By: Datesuraj dhulannavarBelum ada peringkat
- Dam Shutter Control Using Servo MotorDokumen3 halamanDam Shutter Control Using Servo MotorkarthikBelum ada peringkat
- Square Hole Drilling MachineDokumen4 halamanSquare Hole Drilling Machineedisonmech_erfBelum ada peringkat
- A Field Method For Measurement of Infiltration PDFDokumen31 halamanA Field Method For Measurement of Infiltration PDFHamza MamiBelum ada peringkat
- Filmgate Technical Screen Print InformationDokumen34 halamanFilmgate Technical Screen Print InformationramakrishnafacebookBelum ada peringkat
- Ficha Tecnica 750 GPMDokumen156 halamanFicha Tecnica 750 GPMByron Chele0% (2)
- F80 Press ReleaseDokumen2 halamanF80 Press Releasespscribd1Belum ada peringkat
- C617Dokumen5 halamanC617Rajesh KumarBelum ada peringkat
- Ch4 Fluid KinematicsDokumen30 halamanCh4 Fluid Kinematicsa u khan100% (1)
- National Institute of Technology Durgapur: Department of Chemical EngineeringDokumen2 halamanNational Institute of Technology Durgapur: Department of Chemical Engineeringpiyush dwivediBelum ada peringkat
- R.pearson - Key To Consciousness. Quantum GravitationDokumen16 halamanR.pearson - Key To Consciousness. Quantum GravitationJorgee_Porgee_8203Belum ada peringkat
- Sade-5tnqzd r12 enDokumen9 halamanSade-5tnqzd r12 enPop-Coman SimionBelum ada peringkat
- Astronomy - November 2013 (Gnv64)Dokumen80 halamanAstronomy - November 2013 (Gnv64)edies50% (2)
- HGV Gas Fuel Throttle ValveDokumen41 halamanHGV Gas Fuel Throttle ValveSayayinBelum ada peringkat
- Lab Report On AdsorptionDokumen12 halamanLab Report On AdsorptionElizabeth Polancos BruaBelum ada peringkat
- Micro Servo RobotDokumen40 halamanMicro Servo Robotlokesh mahor0% (1)
- ASh SeriesDokumen48 halamanASh SeriesAyman Saber100% (2)
- The Definite Integral and Its ApplicationsDokumen13 halamanThe Definite Integral and Its Applicationsapi-312673653100% (1)
- Neuro ThermodynamicsDokumen32 halamanNeuro ThermodynamicsNanjit KumarBelum ada peringkat
- Ahmed BodyDokumen15 halamanAhmed Bodyk sai krishnaBelum ada peringkat
- Frac To GraphyDokumen639 halamanFrac To GraphyBHARANIBelum ada peringkat
- Lift Stability AnalysisDokumen23 halamanLift Stability Analysisaiyubi2Belum ada peringkat
- Valve and Pipeline Design Notes - Part 1Dokumen29 halamanValve and Pipeline Design Notes - Part 1Anilduth Baldan100% (2)
- Long-Life Asphalt Pavements - Technical2007Dokumen24 halamanLong-Life Asphalt Pavements - Technical2007Sen HuBelum ada peringkat
- ACA 2010 Abstracts Manish Chandra PathakDokumen602 halamanACA 2010 Abstracts Manish Chandra Pathakpmcy2Belum ada peringkat
- A. Kitaigorodsky - I Am A Physicist (1971, Mir Publishers)Dokumen221 halamanA. Kitaigorodsky - I Am A Physicist (1971, Mir Publishers)dal pesBelum ada peringkat
- BSC Combined SO (8 Banks & FIs) - 2018 (Written Math Solution) by Ajgar Ali - PDF Version 1Dokumen10 halamanBSC Combined SO (8 Banks & FIs) - 2018 (Written Math Solution) by Ajgar Ali - PDF Version 1Zia UddinBelum ada peringkat
- Applied SciencesDokumen25 halamanApplied SciencesMario BarbarossaBelum ada peringkat
- Filetype PDF Photoconduction SemiconductorDokumen2 halamanFiletype PDF Photoconduction SemiconductorGregBelum ada peringkat
- Part 5 MT Drives and Mechanisms 1Dokumen11 halamanPart 5 MT Drives and Mechanisms 1Anonymous YaJlLHYBelum ada peringkat
- Physics - Thermal Physics - Lab ReportDokumen6 halamanPhysics - Thermal Physics - Lab ReportKali stringsBelum ada peringkat
- Bass Instruments: Installation and Instruction ManualDokumen34 halamanBass Instruments: Installation and Instruction ManualYul GoncalvesBelum ada peringkat
- Permutations and CombinationsDokumen69 halamanPermutations and CombinationsNikhil0% (2)