Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Embody Chairs Disassembly InstructionsDokumen4 halamanEmbody Chairs Disassembly Instructionsguiness_joe9154Belum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hussain Rabia - Drill Bits (Chapter 9)Dokumen44 halamanHussain Rabia - Drill Bits (Chapter 9)Andreas Ansen VitalisBelum ada peringkat
- Name of The Company: Columbia Wire and Cable Corporation Date of Tour: October 23, 2019 Overview of The CompanyDokumen3 halamanName of The Company: Columbia Wire and Cable Corporation Date of Tour: October 23, 2019 Overview of The CompanyJhun Michael LocusBelum ada peringkat
- 13 - Drive Controller - Operation ManualDokumen14 halaman13 - Drive Controller - Operation ManualMiguel RodriguezBelum ada peringkat
- 3 Zone Lincoln PDFDokumen1 halaman3 Zone Lincoln PDFMiguel RodriguezBelum ada peringkat
- Diagrama de Bloque de 3 Zonas PDFDokumen1 halamanDiagrama de Bloque de 3 Zonas PDFMiguel RodriguezBelum ada peringkat
- Esquema Hidráulico AtualizadoDokumen3 halamanEsquema Hidráulico AtualizadoMiguel RodriguezBelum ada peringkat
- 014 CAT-6060 AC 60Hz E-Drive CAMP + SIL + BCS4 FS Legend H-Schematic Canada No New AvailableDokumen13 halaman014 CAT-6060 AC 60Hz E-Drive CAMP + SIL + BCS4 FS Legend H-Schematic Canada No New AvailableMiguel RodriguezBelum ada peringkat
- Diagrama de Bloque de 4 Zonas PDFDokumen1 halamanDiagrama de Bloque de 4 Zonas PDFMiguel RodriguezBelum ada peringkat
- NDT-PQ PDFDokumen7 halamanNDT-PQ PDFMiguel RodriguezBelum ada peringkat
- Extension - Cable Grease SystemDokumen3 halamanExtension - Cable Grease SystemMiguel RodriguezBelum ada peringkat
- Bronze Bushing Shrinkage On Diameter PDFDokumen1 halamanBronze Bushing Shrinkage On Diameter PDFMiguel RodriguezBelum ada peringkat
- Nondestructive Test Procedure: Acceptance Criteria For Nondestructive Testing of P&H ProductDokumen3 halamanNondestructive Test Procedure: Acceptance Criteria For Nondestructive Testing of P&H ProductMiguel RodriguezBelum ada peringkat
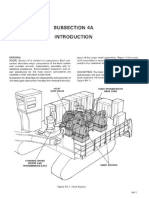
- Section 4 Hoist SystemDokumen32 halamanSection 4 Hoist SystemMiguel RodriguezBelum ada peringkat
- Manufacturing Operating Procedure: Appendix "B" Deviation Requests (MRB)Dokumen3 halamanManufacturing Operating Procedure: Appendix "B" Deviation Requests (MRB)Miguel RodriguezBelum ada peringkat
- Manufacturing Operating Procedure: Recommended Filler Material and Preheat/Interpass TemperaturesDokumen5 halamanManufacturing Operating Procedure: Recommended Filler Material and Preheat/Interpass TemperaturesMiguel Rodriguez100% (1)
- Bypass Kit Hoist FilterDokumen2 halamanBypass Kit Hoist FilterMiguel RodriguezBelum ada peringkat
- Table of Contents:: User InstructionsDokumen2 halamanTable of Contents:: User InstructionsMiguel RodriguezBelum ada peringkat
- Section 9 Maintenance WeldingDokumen4 halamanSection 9 Maintenance WeldingMiguel RodriguezBelum ada peringkat
- Section 10 LubricationDokumen16 halamanSection 10 LubricationMiguel RodriguezBelum ada peringkat
- 004 - Cat-6040AC - CAMP-SIL-BCS4 - E-Motor and Powertrain PDFDokumen12 halaman004 - Cat-6040AC - CAMP-SIL-BCS4 - E-Motor and Powertrain PDFMiguel RodriguezBelum ada peringkat
- Tarjetas 2800XPBDokumen3 halamanTarjetas 2800XPBMiguel RodriguezBelum ada peringkat
- Section 3 Swing SystemDokumen35 halamanSection 3 Swing SystemMiguel RodriguezBelum ada peringkat
- Sis Web User Guide v3-5-1Dokumen60 halamanSis Web User Guide v3-5-1Miguel RodriguezBelum ada peringkat
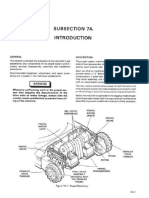
- Section 7 Propel SystemDokumen50 halamanSection 7 Propel SystemMiguel RodriguezBelum ada peringkat
- NPR & Kits PDFDokumen11 halamanNPR & Kits PDFMiguel RodriguezBelum ada peringkat
- Service Technician Workbench: What's New in 2004BDokumen53 halamanService Technician Workbench: What's New in 2004BMiguel RodriguezBelum ada peringkat
- Capsules VDokumen36 halamanCapsules VrandatagBelum ada peringkat
- Process Flow Chart of Woven Dyeing - Textile FlowchartDokumen5 halamanProcess Flow Chart of Woven Dyeing - Textile FlowchartGOWTHAM CHANDRUBelum ada peringkat
- Gestra Check ValveDokumen4 halamanGestra Check Valvetilakthakar1Belum ada peringkat
- So Lubi LizerDokumen3 halamanSo Lubi LizerfushiersBelum ada peringkat
- 5R110W Assembly PDFDokumen16 halaman5R110W Assembly PDFLuis VelazquezBelum ada peringkat
- MSCMS Issue 6 Rev-0-Pages-32Dokumen1 halamanMSCMS Issue 6 Rev-0-Pages-32Bilal JavaidBelum ada peringkat
- A Preliminary Study On Bladder-Assisted Rotomolding of Thermoplastic Polymer CompositesDokumen12 halamanA Preliminary Study On Bladder-Assisted Rotomolding of Thermoplastic Polymer Compositespetrusz1Belum ada peringkat
- Methods, Processes, and Equipment in Size Reduction of Solids - 5ME2Dokumen35 halamanMethods, Processes, and Equipment in Size Reduction of Solids - 5ME2Ana Marie Baysa100% (3)
- Types of PaintDokumen17 halamanTypes of PaintdhanyaBelum ada peringkat
- Airflow Pattern StudiesDokumen18 halamanAirflow Pattern Studiessainath_84100% (1)
- Te 710 WebDokumen57 halamanTe 710 WebRoman KrautschneiderBelum ada peringkat
- Water and Wastewater Treatment-Monroe EnvironmentalDokumen20 halamanWater and Wastewater Treatment-Monroe EnvironmentalHussein Ali Mahdi Al-ZubaidyBelum ada peringkat
- Wiper BladeDokumen3 halamanWiper Bladeghyd artiagaBelum ada peringkat
- Dow Corning 732 Multi-Purpose Sealant: Product InformationDokumen2 halamanDow Corning 732 Multi-Purpose Sealant: Product InformationProject Sales CorpBelum ada peringkat
- b3850 Series Terminal Controllers: Andover ContinuumDokumen6 halamanb3850 Series Terminal Controllers: Andover ContinuumrbelduaBelum ada peringkat
- ETICS Details SubmissionDokumen11 halamanETICS Details SubmissionbarunBelum ada peringkat
- Rheem ManualDokumen20 halamanRheem ManualeurobobBelum ada peringkat
- Thesis (1997-2006)Dokumen7 halamanThesis (1997-2006)picefeati0% (1)
- Secondary 1 - Science - SA2 - 2019 - 1Dokumen17 halamanSecondary 1 - Science - SA2 - 2019 - 1DigitalTransformation MitrpholBelum ada peringkat
- Home ScienceDokumen3 halamanHome ScienceCricket ClutchBelum ada peringkat
- Defects and CausesDokumen58 halamanDefects and CausesPrasannaVenkatesan100% (2)
- Electron Beam Welding AbstractDokumen3 halamanElectron Beam Welding AbstractEmmanuel PeterBelum ada peringkat
- Geclearning: Step 1. Choose or Calculate Inert O Concentration Required (Vol%)Dokumen4 halamanGeclearning: Step 1. Choose or Calculate Inert O Concentration Required (Vol%)sandy4u2k2Belum ada peringkat
- Practice Set 2Dokumen6 halamanPractice Set 2Marielle CastañedaBelum ada peringkat
- Hydraulic Shovel: Engine BucketDokumen32 halamanHydraulic Shovel: Engine BucketJulio CRBelum ada peringkat
- Additive Manufacturing - Question Bank With Answers - May 2023Dokumen13 halamanAdditive Manufacturing - Question Bank With Answers - May 2023Surya100% (2)
- MSDS - Fuel-Protect, Keep Clean Solution, For Diesel InjectorDokumen5 halamanMSDS - Fuel-Protect, Keep Clean Solution, For Diesel InjectorDaniel OlanoBelum ada peringkat