Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Weierwei Vev-3288 D Manual Price RangeDokumen2 halamanWeierwei Vev-3288 D Manual Price RangeCybertronics Center100% (4)
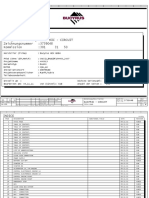
- Elektric Schematic - RH 400 400013Dokumen290 halamanElektric Schematic - RH 400 400013Vikranth ReddyBelum ada peringkat
- ErrorsDokumen2 halamanErrorsArun MoenaqBelum ada peringkat
- Uav 3Dokumen2 halamanUav 3هانيالنويرةBelum ada peringkat
- UserDokumen1 halamanUserهانيالنويرةBelum ada peringkat
- Quiz on Telecom, Networking and Programming ConceptsDokumen5 halamanQuiz on Telecom, Networking and Programming ConceptsهانيالنويرةBelum ada peringkat
- Hani Yahia Ali Al-Nowairah: QualificationsDokumen1 halamanHani Yahia Ali Al-Nowairah: QualificationsهانيالنويرةBelum ada peringkat
- Reference Request Form (Save The Children Org.)Dokumen1 halamanReference Request Form (Save The Children Org.)هانيالنويرةBelum ada peringkat
- MicrowaveTheory PDFDokumen520 halamanMicrowaveTheory PDFosadeamos8684Belum ada peringkat
- Beamforming in Wireless Communication Standards: A SurveyDokumen5 halamanBeamforming in Wireless Communication Standards: A SurveyهانيالنويرةBelum ada peringkat
- Satellite communication MCQ bank overviewDokumen68 halamanSatellite communication MCQ bank overviewهانيالنويرةBelum ada peringkat
- Advanced CalculusDokumen592 halamanAdvanced Calculusjosemarcelod7088Belum ada peringkat
- MicrowaveTheory PDFDokumen520 halamanMicrowaveTheory PDFosadeamos8684Belum ada peringkat
- علي مانع الصيحDokumen1 halamanعلي مانع الصيحهانيالنويرةBelum ada peringkat
- Intro 2 EngDokumen33 halamanIntro 2 EngNguyen Huu HieuBelum ada peringkat
- Quadcopter Pro PDFDokumen1 halamanQuadcopter Pro PDFهانيالنويرةBelum ada peringkat
- UAV flight modes explainedDokumen3 halamanUAV flight modes explainedهانيالنويرةBelum ada peringkat
- Hani Yahia Ali Al-Nowairah: QualificationsDokumen1 halamanHani Yahia Ali Al-Nowairah: QualificationsهانيالنويرةBelum ada peringkat
- Hani Yahia Ali Al-Nowairah: QualificationsDokumen1 halamanHani Yahia Ali Al-Nowairah: QualificationsهانيالنويرةBelum ada peringkat
- مستند نصي جديد (2) Dokumen1 halamanمستند نصي جديد (2) هانيالنويرةBelum ada peringkat
- Cover LetterDokumen2 halamanCover LetterهانيالنويرةBelum ada peringkat
- Hani Al-Nowairah C.VDokumen1 halamanHani Al-Nowairah C.VهانيالنويرةBelum ada peringkat
- RecDokumen1 halamanRecهانيالنويرةBelum ada peringkat
- Cover LetterDokumen2 halamanCover LetterهانيالنويرةBelum ada peringkat
- AuerbachDokumen28 halamanAuerbachهانيالنويرةBelum ada peringkat
- Hello MR Chris AndersonDokumen1 halamanHello MR Chris AndersonهانيالنويرةBelum ada peringkat
- Salah Najeeb AL-Hakimi: Professional SummarDokumen1 halamanSalah Najeeb AL-Hakimi: Professional SummarهانيالنويرةBelum ada peringkat
- Sana - A University Bid 2014Dokumen52 halamanSana - A University Bid 2014هانيالنويرةBelum ada peringkat
- Real-Time Implementation of Hydroelectric Power Plant Using PLC and ScadaDokumen4 halamanReal-Time Implementation of Hydroelectric Power Plant Using PLC and ScadaJosephBelum ada peringkat
- Bender A-Isometer IRDH575 User ManualDokumen96 halamanBender A-Isometer IRDH575 User ManualAndreea Mitu HlandanBelum ada peringkat
- Interactive Rendering Using The Render Cache: AbstractDokumen13 halamanInteractive Rendering Using The Render Cache: Abstractanjaiah_19945Belum ada peringkat
- 1464415497007Dokumen72 halaman1464415497007romanaeva05Belum ada peringkat
- 4937 DI5 3x8899 2Dokumen17 halaman4937 DI5 3x8899 2CdeKoninghBelum ada peringkat
- Gs Ds Nanocom Ax100 33Dokumen27 halamanGs Ds Nanocom Ax100 33Damas WangsaBelum ada peringkat
- The Opencv User Guide: Release 2.4.9.0Dokumen23 halamanThe Opencv User Guide: Release 2.4.9.0osilatorBelum ada peringkat
- Eng TKR-304E ManualDokumen36 halamanEng TKR-304E ManualJean TevesBelum ada peringkat
- Sirius enDokumen532 halamanSirius enJim_____Belum ada peringkat
- Telecommunications Switching Systems 7Dokumen20 halamanTelecommunications Switching Systems 7Ramcharan BuddiBelum ada peringkat
- Handheld High Resolution Inkjet Printer: Multiple Files PrintingDokumen2 halamanHandheld High Resolution Inkjet Printer: Multiple Files PrintingMelahel Global SolutionsBelum ada peringkat
- Assignment FDDI TokenRingDokumen6 halamanAssignment FDDI TokenRingkavindagayaBelum ada peringkat
- MPC5748GEVBUGDokumen88 halamanMPC5748GEVBUGBaCresBelum ada peringkat
- 4aa5 4598eeeDokumen32 halaman4aa5 4598eeeMadaMadutsaBelum ada peringkat
- Fast switching diode 1N4150 features and specificationsDokumen2 halamanFast switching diode 1N4150 features and specificationsArturo HernandezBelum ada peringkat
- Dialight LED Catalog UL StreetSense-StreetLight Americas EnglishDokumen2 halamanDialight LED Catalog UL StreetSense-StreetLight Americas EnglishDonalyn AdolfoBelum ada peringkat
- TriBand Trisector - SSC-760220020 - 2.2m AntennaDokumen7 halamanTriBand Trisector - SSC-760220020 - 2.2m AntennaborisBelum ada peringkat
- Novo Documento Do Microsoft Office WordDokumen9 halamanNovo Documento Do Microsoft Office WordVictor José PauloBelum ada peringkat
- Peugeot Codes PDFDokumen3 halamanPeugeot Codes PDFandrewBelum ada peringkat
- Manual Sony Kp-53v100Dokumen176 halamanManual Sony Kp-53v100Bebaa T Henderson Maslow BeltBelum ada peringkat
- ATP ManualDokumen270 halamanATP ManualJose Jorge Fontalvo100% (1)
- Digital&Analolg SignalingDokumen60 halamanDigital&Analolg SignalingErick VarelaBelum ada peringkat
- 30-V N- and P-Channel MOSFET Technical SpecificationsDokumen1 halaman30-V N- and P-Channel MOSFET Technical SpecificationsRicardo VillarroelBelum ada peringkat
- 2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Dokumen48 halaman2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Ranko KohimeBelum ada peringkat
- MC-1300 Marathon Cutting Plotter: Maintenance ManualDokumen126 halamanMC-1300 Marathon Cutting Plotter: Maintenance Manualgass2Belum ada peringkat
- UPG-07C/UPG-07 CW/UPG-07 DLCW Ultrasonic Thickness Gages: Quick Start GuideDokumen8 halamanUPG-07C/UPG-07 CW/UPG-07 DLCW Ultrasonic Thickness Gages: Quick Start GuideSiles LimberdsBelum ada peringkat
- Roland TR-505 ROM Expansion Installation Instructions: November 2016Dokumen3 halamanRoland TR-505 ROM Expansion Installation Instructions: November 2016listentomerijnBelum ada peringkat
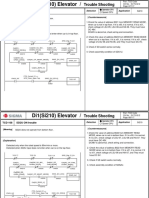
- TCD 114 RPD ON trouble detection and countermeasuresDokumen7 halamanTCD 114 RPD ON trouble detection and countermeasuresFERNSBelum ada peringkat