Anda mungkin juga menyukai
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDokumen10 halamanNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranBelum ada peringkat
- Axisymmetric Ducted Rotor Analysis and DesignDokumen20 halamanAxisymmetric Ducted Rotor Analysis and DesignIman SaberiBelum ada peringkat
- A Procedure For Propeller Design by Inverse MethodsDokumen12 halamanA Procedure For Propeller Design by Inverse MethodsMuadz MuhammadBelum ada peringkat
- VAWTDokumen13 halamanVAWTEAjdehak100% (3)
- Design and Analysis of Horizontal Axis Wind TurbineDokumen42 halamanDesign and Analysis of Horizontal Axis Wind TurbineSagar MoreBelum ada peringkat
- Rotor Blade Element Theory ExplainedDokumen6 halamanRotor Blade Element Theory ExplainedLuz Ángela Rincón GallegoBelum ada peringkat
- PS-Module-II (2013 - 03 - 05 13 - 52 - 50 UTC)Dokumen21 halamanPS-Module-II (2013 - 03 - 05 13 - 52 - 50 UTC)RahulBelum ada peringkat
- The Calculation of Aerodynamic Loading On Surfaces of Any ShapeDokumen23 halamanThe Calculation of Aerodynamic Loading On Surfaces of Any Shapedevast_wBelum ada peringkat
- A Study of The Static Stiffness of Machine Tool SpindlesDokumen18 halamanA Study of The Static Stiffness of Machine Tool SpindlesnounakameliaBelum ada peringkat
- Wind TurbineDokumen8 halamanWind Turbinesudeeraranjan100% (1)
- Fifth International Congress On Sound and Vibration: Howard@vesta - Curtin. Edu - AuDokumen9 halamanFifth International Congress On Sound and Vibration: Howard@vesta - Curtin. Edu - AuJigneshBelum ada peringkat
- Numerical Study On Performance of Curved Wind Turbine Blade For Loads ReductionDokumen9 halamanNumerical Study On Performance of Curved Wind Turbine Blade For Loads ReductionCid CastroBelum ada peringkat
- Double-Multiple StramtubeDokumen9 halamanDouble-Multiple StramtubeTheo PopaBelum ada peringkat
- WindturbineDokumen14 halamanWindturbineImran ShahzadBelum ada peringkat
- Test Transient TiresDokumen12 halamanTest Transient TiressiritapeBelum ada peringkat
- Torque Production in Permanent-MagnetDokumen6 halamanTorque Production in Permanent-MagnetTien Dung TranBelum ada peringkat
- 1930 - Application of Goldstein's Airscrew Theory To DesignDokumen30 halaman1930 - Application of Goldstein's Airscrew Theory To DesignterenceBelum ada peringkat
- Quadcopter Propeller Design and Performance Analysis: Endrowednes Kuantama, Dan Craciun, Ioan Tarca and Radu TarcaDokumen9 halamanQuadcopter Propeller Design and Performance Analysis: Endrowednes Kuantama, Dan Craciun, Ioan Tarca and Radu Tarcanguyễn namBelum ada peringkat
- Motor Basic PDFDokumen4 halamanMotor Basic PDFrijilpoothadiBelum ada peringkat
- Determination of The Structural Properties of Helicopter Rotor BladesDokumen20 halamanDetermination of The Structural Properties of Helicopter Rotor Blades雷黎明Belum ada peringkat
- MIT Aircraft Stability and Control 02 - AssignmentsDokumen14 halamanMIT Aircraft Stability and Control 02 - AssignmentsAndré Da Luz MoreiraBelum ada peringkat
- SIMBOLOS DE GLAURET Bose, N. - The Autogyro For Ship Propulsion (1983)Dokumen8 halamanSIMBOLOS DE GLAURET Bose, N. - The Autogyro For Ship Propulsion (1983)Mariela TisseraBelum ada peringkat
- Eywords: Analytical Models ImpellerDokumen11 halamanEywords: Analytical Models ImpellerbaubaumihaiBelum ada peringkat
- Conical Ribbon ParachuteDokumen84 halamanConical Ribbon ParachuteFlorin NiteBelum ada peringkat
- Minimum Induced Loss Windmills and Propellers Larrabee 1983Dokumen11 halamanMinimum Induced Loss Windmills and Propellers Larrabee 1983Diego Schmitt MonteroBelum ada peringkat
- 5542-Article Text PDF-9300-1-10-20130718Dokumen21 halaman5542-Article Text PDF-9300-1-10-20130718zeinabBelum ada peringkat
- Wartime Report: National Advisory Committee For AeronauticsDokumen27 halamanWartime Report: National Advisory Committee For AeronauticsasimaliabbasiBelum ada peringkat
- Hinglesss Rotor EOM ModelDokumen9 halamanHinglesss Rotor EOM Modelhmalikn7581Belum ada peringkat
- Designing Blades for Narrow Radial Flow ImpellersDokumen13 halamanDesigning Blades for Narrow Radial Flow Impellerssj19330Belum ada peringkat
- Qprop TheoryDokumen14 halamanQprop TheoryLow CmBelum ada peringkat
- Energy Expressions For Rotating Tapered Timoshenko BeamsDokumen5 halamanEnergy Expressions For Rotating Tapered Timoshenko BeamsAbdel Salam AlsabaghBelum ada peringkat
- Propeller TheoryDokumen4 halamanPropeller TheoryArunSutharBelum ada peringkat
- Static Thrust of Airplane PropellersDokumen6 halamanStatic Thrust of Airplane PropellersEwaBelum ada peringkat
- Hoa 1979Dokumen13 halamanHoa 1979Ciprian ComanBelum ada peringkat
- Michal Ke 1982Dokumen17 halamanMichal Ke 1982ahmadalsaiahBelum ada peringkat
- Stability in Hovering Ornithopter FlightDokumen8 halamanStability in Hovering Ornithopter FlightgreatrijuvanBelum ada peringkat
- A Numerical Exploration of Parameter Dependence in Power Optimal Flapping FlightDokumen31 halamanA Numerical Exploration of Parameter Dependence in Power Optimal Flapping FlightxebitBelum ada peringkat
- Stability Control ReportDokumen15 halamanStability Control Reportvidic971Belum ada peringkat
- Flexural Motion of a Radially Rotating BeamDokumen10 halamanFlexural Motion of a Radially Rotating BeamAkshat RastogiBelum ada peringkat
- Single DOF Flutter CalculationsDokumen29 halamanSingle DOF Flutter CalculationsSean Corry WrightBelum ada peringkat
- 05 - PAPER - Taher G - Investigation Performance Darieus VAWTDokumen12 halaman05 - PAPER - Taher G - Investigation Performance Darieus VAWTZamalludin HermawanBelum ada peringkat
- Racing Aerodynamics Seminar AbstractDokumen21 halamanRacing Aerodynamics Seminar AbstractAnubis_RudeBelum ada peringkat
- Data For Heli Rotor ValidationDokumen135 halamanData For Heli Rotor ValidationKaradiasBelum ada peringkat
- Numerical Lifting Line Theory Applied To Drooped Leading-Edge Wings Below and Above StallDokumen7 halamanNumerical Lifting Line Theory Applied To Drooped Leading-Edge Wings Below and Above Stallniltonbezerramarques100% (1)
- Blade Element Momentum TheoryDokumen11 halamanBlade Element Momentum TheoryAnonymous qRe192Belum ada peringkat
- Actuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùDokumen6 halamanActuator Fault Detection System For A Mini-Quadrotor: A. Freddi, S. Longhi and A. MonteriùadilsondissoBelum ada peringkat
- 3D Inviscid Flutter of Rotor Blades and Stator/Rotor StageDokumen12 halaman3D Inviscid Flutter of Rotor Blades and Stator/Rotor Stagethrust123Belum ada peringkat
- ME 131B Fluid Mechanics Solutions to Week Eight Problem Session: Angular Momentum Principle (3/2/98Dokumen14 halamanME 131B Fluid Mechanics Solutions to Week Eight Problem Session: Angular Momentum Principle (3/2/98ing_manceraBelum ada peringkat
- Hydrodynamic Performance Analysis of Propeller-Rudder System With The Rudder Parameters ChangingDokumen7 halamanHydrodynamic Performance Analysis of Propeller-Rudder System With The Rudder Parameters ChangingBayu Pratama WidhiyasaBelum ada peringkat
- JoA Vol41 No1 Lifting Line Analysis For TwistedWings and Washout OptimizedWingsDokumen9 halamanJoA Vol41 No1 Lifting Line Analysis For TwistedWings and Washout OptimizedWingsgeorrafpapBelum ada peringkat
- One-dimensional Momentum Theory and the Betz LimitDokumen20 halamanOne-dimensional Momentum Theory and the Betz LimitSagar MoreBelum ada peringkat
- The Effect of Seatback Stiffness and Collision Severity On The Dynamic Behaviour of The Head During WhiplashDokumen10 halamanThe Effect of Seatback Stiffness and Collision Severity On The Dynamic Behaviour of The Head During WhiplashDeepsBelum ada peringkat
- Dynamic Wake1Dokumen12 halamanDynamic Wake1Abdulqadir Aziz Singapore WalaBelum ada peringkat
- Torsion Chapter: Shear Stress and Angle of Twist CalculationsDokumen9 halamanTorsion Chapter: Shear Stress and Angle of Twist CalculationsAshish KumarBelum ada peringkat
- Modeling of Complex Systems: Application to Aeronautical DynamicsDari EverandModeling of Complex Systems: Application to Aeronautical DynamicsBelum ada peringkat
- Pressure Vessel and Stacks Field Repair ManualDari EverandPressure Vessel and Stacks Field Repair ManualPenilaian: 4 dari 5 bintang4/5 (4)
- Robot Manipulators: Modeling, Performance Analysis and ControlDari EverandRobot Manipulators: Modeling, Performance Analysis and ControlBelum ada peringkat
- Tensegrity: Structural Systems for the FutureDari EverandTensegrity: Structural Systems for the FuturePenilaian: 1 dari 5 bintang1/5 (1)
- Math g7 m1 Topic C Lesson 11 TeacherDokumen9 halamanMath g7 m1 Topic C Lesson 11 TeacherAntonio PerezBelum ada peringkat
- Brookes Bell-Carriage of SulphurDokumen4 halamanBrookes Bell-Carriage of SulphurAntonio Perez100% (1)
- Us 4428223Dokumen9 halamanUs 4428223Antonio PerezBelum ada peringkat
- Ni-Resist Alloy Properties and Applications GuideDokumen40 halamanNi-Resist Alloy Properties and Applications GuidePrasad Aher100% (1)
- AppsDokumen53 halamanAppsAntonio PerezBelum ada peringkat
- TESON Benchmark Report and Overview PDFDokumen32 halamanTESON Benchmark Report and Overview PDFAntonio PerezBelum ada peringkat
- Internal Rotating Inspection SystemDokumen2 halamanInternal Rotating Inspection SystemAntonio PerezBelum ada peringkat
- Conductivity IronDokumen6 halamanConductivity IronAntonio PerezBelum ada peringkat
- Ad 630Dokumen13 halamanAd 630Antonio PerezBelum ada peringkat
- AD544Dokumen12 halamanAD544Antonio PerezBelum ada peringkat
- State of The Art RFT - Meeting The Ferromagnetic Tube Challenge State of The Art RFT Meeting Ferromagnetic Tube Challenge PDFDokumen2 halamanState of The Art RFT - Meeting The Ferromagnetic Tube Challenge State of The Art RFT Meeting Ferromagnetic Tube Challenge PDFAntonio PerezBelum ada peringkat
- Niobium-Stabilized Alloys Enable Higher-Temperature Steam ReformingDokumen5 halamanNiobium-Stabilized Alloys Enable Higher-Temperature Steam ReformingAntonio PerezBelum ada peringkat
- English Language Requirements - NTNUDokumen6 halamanEnglish Language Requirements - NTNUAntonio PerezBelum ada peringkat
- MMU English Qualification Requirements For Euroinkanet 2nd COHORTDokumen1 halamanMMU English Qualification Requirements For Euroinkanet 2nd COHORTAntonio PerezBelum ada peringkat
- Design of A 10kHz FilterDokumen11 halamanDesign of A 10kHz FilterEriBelum ada peringkat
- Numerical Value Analysis of Eddy Current Probe Coil of Placement Model Based On ANSYSDokumen8 halamanNumerical Value Analysis of Eddy Current Probe Coil of Placement Model Based On ANSYSnazari_smeirBelum ada peringkat
- Op Amp Circuit Collection - National SemiconductorDokumen33 halamanOp Amp Circuit Collection - National Semiconductorkok6Belum ada peringkat
- English Language Requirements - NTNUDokumen6 halamanEnglish Language Requirements - NTNUAntonio PerezBelum ada peringkat
- Maz 643018 PDFDokumen2 halamanMaz 643018 PDFAntonio PerezBelum ada peringkat
- Ielts Test Dates 2017Dokumen1 halamanIelts Test Dates 2017Antonio PerezBelum ada peringkat
- Communicating Your IdeasDokumen15 halamanCommunicating Your IdeasAntonio PerezBelum ada peringkat
- RAMS Brochure 49096aDokumen12 halamanRAMS Brochure 49096aAntonio PerezBelum ada peringkat
- Communicating Your IdeasDokumen15 halamanCommunicating Your IdeasAntonio PerezBelum ada peringkat
- Broc Ilook 01 UsDokumen5 halamanBroc Ilook 01 UsAntonio PerezBelum ada peringkat
- Jac Hfc4250kr1k3Dokumen7 halamanJac Hfc4250kr1k3Antonio PerezBelum ada peringkat
- Bobbin Probe Technical SpecificationsDokumen1 halamanBobbin Probe Technical SpecificationsAntonio PerezBelum ada peringkat
- JAC HFC4250KR1K3 Tractor Unit (Batch #252) Made in ChinaDokumen5 halamanJAC HFC4250KR1K3 Tractor Unit (Batch #252) Made in ChinaAntonio PerezBelum ada peringkat
- 32 I D Tubing ProbesDokumen1 halaman32 I D Tubing ProbesAntonio PerezBelum ada peringkat
- Inductance Calculation TechniquesDokumen11 halamanInductance Calculation Techniquesgcamarca100% (1)
- Hoskin Lx2v.pdf 419e14a147d31Dokumen7 halamanHoskin Lx2v.pdf 419e14a147d31Antonio PerezBelum ada peringkat
- CH 16Dokumen53 halamanCH 16Mega LialitaBelum ada peringkat
- Design Mech DryersDokumen5 halamanDesign Mech DryersBrandon DouglasBelum ada peringkat
- GHGT-15: ConferenceDokumen36 halamanGHGT-15: ConferencechomiBelum ada peringkat
- Foton Operation and Miantenance Manuai For View Series Light BusDokumen279 halamanFoton Operation and Miantenance Manuai For View Series Light BusHarlinton descalzi82% (17)
- Mehdi Rahmani Andebili Differential Equations Practice ProblemsDokumen109 halamanMehdi Rahmani Andebili Differential Equations Practice ProblemsvdeodaatoBelum ada peringkat
- 巴拉圭DIGITAL ENG H2 Propuesta de InnovacionDokumen57 halaman巴拉圭DIGITAL ENG H2 Propuesta de InnovacionXA ShrexerBelum ada peringkat
- Champ FMV NR HID FloodlightsDokumen4 halamanChamp FMV NR HID Floodlightsyasararafat1Belum ada peringkat
- Climate Change EssayDokumen2 halamanClimate Change EssaySammBelum ada peringkat
- Zero BezzelDokumen2 halamanZero BezzelkhoerulmuftiBelum ada peringkat
- A Polyhydron Group Company: DescriptionDokumen3 halamanA Polyhydron Group Company: DescriptionHorea CordunianuBelum ada peringkat
- Advances in Wind Pump Design for PakistanDokumen18 halamanAdvances in Wind Pump Design for PakistanKhaled AbdusamadBelum ada peringkat
- Thyristor 3 Phase InverterDokumen31 halamanThyristor 3 Phase InverterjorgeBelum ada peringkat
- Swartland SDFDokumen68 halamanSwartland SDFAerial ChenBelum ada peringkat
- Refrigeration & Air Conditioning Systems ExplainedDokumen23 halamanRefrigeration & Air Conditioning Systems ExplainedLovedeep LoviBelum ada peringkat
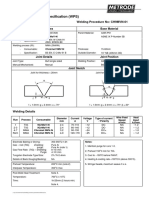
- Welding Procedure Specification (WPS)Dokumen6 halamanWelding Procedure Specification (WPS)Mohamad Marwan HamwiBelum ada peringkat
- UC Personal Insight QuestionsDokumen2 halamanUC Personal Insight QuestionsEdmund Leibert IIIBelum ada peringkat
- TriScroll 300 Series Dry Scroll Vacuum Pump PDFDokumen106 halamanTriScroll 300 Series Dry Scroll Vacuum Pump PDFWilliamRiveraBelum ada peringkat
- Robin Engine EH650 EH650DA JapanDokumen29 halamanRobin Engine EH650 EH650DA JapanyewlimBelum ada peringkat
- Print TTTDokumen36 halamanPrint TTTMoin ul IslamBelum ada peringkat
- Northside-Southside TOD StudyDokumen265 halamanNorthside-Southside TOD StudynextSTL.comBelum ada peringkat
- Series 150 Overshot Make Up Torques PDFDokumen8 halamanSeries 150 Overshot Make Up Torques PDFRazvan RaduBelum ada peringkat
- ALPAM DrakaDokumen1 halamanALPAM Drakaamir11601Belum ada peringkat
- Optical Fiber-Dispersion SP 2014Dokumen19 halamanOptical Fiber-Dispersion SP 2014Ajay DillikarBelum ada peringkat
- Literature ReviewDokumen18 halamanLiterature ReviewRaymond Manalo Panganiban100% (1)
- Belt Driven 230VAC Generator DatasheetDokumen2 halamanBelt Driven 230VAC Generator DatasheetMohamed ElfayomyBelum ada peringkat
- Sustainable StrategiesDokumen26 halamanSustainable StrategiesJhuneil B GermonesBelum ada peringkat
- SCBA CertDokumen2 halamanSCBA CertSup ChomBelum ada peringkat
- Jsi Peperiksaan Percubaan SPM Fizik 2016Dokumen16 halamanJsi Peperiksaan Percubaan SPM Fizik 2016Amin ARBelum ada peringkat