Anda mungkin juga menyukai
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingDari EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingPenilaian: 4 dari 5 bintang4/5 (1)
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDokumen36 halamanAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineBelum ada peringkat
- Line Follower RobotDokumen16 halamanLine Follower RobotRohit sharmaBelum ada peringkat
- Robot Controlled by Android ApplicationDokumen30 halamanRobot Controlled by Android ApplicationTauheed MullaBelum ada peringkat
- Line Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorDokumen54 halamanLine Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorHasna AbdelwahabBelum ada peringkat
- WIRELESS GESTURE CONTROLLED ROBOT WITH VOICE AND VIDEO CAMERA NewDokumen83 halamanWIRELESS GESTURE CONTROLLED ROBOT WITH VOICE AND VIDEO CAMERA NewSuchitra SwarnaBelum ada peringkat
- Co Project: Edge Avoiding Robot USING 8051 MicrocontrollerDokumen14 halamanCo Project: Edge Avoiding Robot USING 8051 MicrocontrollerJuthik BVBelum ada peringkat
- Project Report On Microcontroller Based Traffic Light ControllerDokumen22 halamanProject Report On Microcontroller Based Traffic Light ControllerMohitpariharBelum ada peringkat
- Project Report On Microcontroller Based Traffic Light ControllerDokumen23 halamanProject Report On Microcontroller Based Traffic Light Controllerالموعظة الحسنه chanelBelum ada peringkat
- IJCRT1812243Dokumen7 halamanIJCRT1812243Shaheer AliBelum ada peringkat
- PLC QuestionsDokumen17 halamanPLC QuestionsbahyBelum ada peringkat
- 8051 Microcontroller Based RFID Car Parking SystemDokumen4 halaman8051 Microcontroller Based RFID Car Parking SystemRahul AwariBelum ada peringkat
- Movement of Robot Using BluetoothDokumen12 halamanMovement of Robot Using BluetoothShubhamBelum ada peringkat
- Wireless 4 Dof Robotic Arm Using Mega 2560-1Dokumen11 halamanWireless 4 Dof Robotic Arm Using Mega 2560-1Kamal HasanBelum ada peringkat
- Research Proposal (Plaza)Dokumen10 halamanResearch Proposal (Plaza)Edmarjan ConcepcionBelum ada peringkat
- Android Mobile Phone Controlled Bluetooth Robot Using 8051 MicrocontrollerDokumen4 halamanAndroid Mobile Phone Controlled Bluetooth Robot Using 8051 MicrocontrollerSanzu PebrurisBelum ada peringkat
- DIII Teknik Mekanika PerkeretaapianDokumen77 halamanDIII Teknik Mekanika PerkeretaapianMOHAMMAD PRATAMA PBelum ada peringkat
- Robotic Arm 8051Dokumen9 halamanRobotic Arm 8051Abhishek Shah0% (1)
- Basic PLCDokumen77 halamanBasic PLCFirdaus Ali50% (2)
- Basic PLC PDFDokumen77 halamanBasic PLC PDFAsgher KhattakBelum ada peringkat
- Speech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceDokumen5 halamanSpeech Recognition System For A Voice Controlled Robot With Real Time Obstacle Detection and AvoidanceMansi YadavBelum ada peringkat
- DC Motor Control System Through Android ApplicatioDokumen4 halamanDC Motor Control System Through Android ApplicatioDeepak ReddyBelum ada peringkat
- Basic PLC (Compatibility Mode)Dokumen39 halamanBasic PLC (Compatibility Mode)Royal Ritesh SharmaBelum ada peringkat
- Applications of 8051 MicrocontrollersDokumen23 halamanApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Street Light Control System:By MaheshrajDokumen67 halamanStreet Light Control System:By MaheshrajMaheshraj Birajdar80% (5)
- Embedded Systems and RoboticsDokumen34 halamanEmbedded Systems and RoboticsSri Syama KasyapaBelum ada peringkat
- Design Consideration and Hardware Components of The SystemDokumen8 halamanDesign Consideration and Hardware Components of The SystemKyaw SoeBelum ada peringkat
- KCEDokumen10 halamanKCEkamal SlashBelum ada peringkat
- Irjet V4i4783 PDFDokumen3 halamanIrjet V4i4783 PDFBipin S CBelum ada peringkat
- VOICE AND BLUETOOTH CONTROLLED ROBOT - Amit KumarDokumen14 halamanVOICE AND BLUETOOTH CONTROLLED ROBOT - Amit Kumarpal sarvesh100% (1)
- Project Presentation PDFDokumen22 halamanProject Presentation PDFARIF KANONBelum ada peringkat
- Smart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatDokumen8 halamanSmart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatE-zat IlmanBelum ada peringkat
- Assignment A PCIDokumen20 halamanAssignment A PCISanjay SundaralingamBelum ada peringkat
- Speech Recognition System For A Voice CoDokumen5 halamanSpeech Recognition System For A Voice Cosyiham487Belum ada peringkat
- PC Based Robot Controlling Using Wireless Communication With ASK ModulationDokumen74 halamanPC Based Robot Controlling Using Wireless Communication With ASK ModulationSyam Kumar SBelum ada peringkat
- Lab 2Dokumen12 halamanLab 2Malik YousafBelum ada peringkat
- DC Motor Control ExpDokumen6 halamanDC Motor Control Expvijesh_anna100% (1)
- IoT Based Robot ArmDokumen39 halamanIoT Based Robot ArmJayashree R100% (1)
- Project Report On Robotic ArmDokumen28 halamanProject Report On Robotic Armpatel ketan84% (25)
- Synopsis On Car Parking SystemDokumen5 halamanSynopsis On Car Parking SystemyrikkiBelum ada peringkat
- Arduino Based Bluetooth Controlled RobotDokumen4 halamanArduino Based Bluetooth Controlled RobotTonyBelum ada peringkat
- Title: Bluetooth Based Robot: Submition Date Sat, 17 July Submited To Dr.R.GoppyDokumen19 halamanTitle: Bluetooth Based Robot: Submition Date Sat, 17 July Submited To Dr.R.Goppymesfin mathewosBelum ada peringkat
- Lab 1Dokumen16 halamanLab 1shameem siddiqueBelum ada peringkat
- Solar Grass CutterDokumen22 halamanSolar Grass CutterPrathik AkkapallyBelum ada peringkat
- Embedded SystemDokumen20 halamanEmbedded SystemSudhanshi ShakyaBelum ada peringkat
- Swarm DocumentationDokumen43 halamanSwarm DocumentationManishaBelum ada peringkat
- SPEED CHECKER FOR HI-WAsYSDokumen26 halamanSPEED CHECKER FOR HI-WAsYSAbhinav KumaarBelum ada peringkat
- Line Follower Using 89s52Dokumen43 halamanLine Follower Using 89s52coolmaleankur100% (2)
- DC Motor Speed Control by AndroidDokumen8 halamanDC Motor Speed Control by AndroidNikhil GaikwadBelum ada peringkat
- Formated ReportDokumen23 halamanFormated ReportJackBelum ada peringkat
- Programmable Logic Controllers and Ladder Logic: 3 YR, 6 SEMDokumen23 halamanProgrammable Logic Controllers and Ladder Logic: 3 YR, 6 SEMAbhishek PranitBelum ada peringkat
- Coin Based Mobile Charger Project ReportDokumen49 halamanCoin Based Mobile Charger Project ReportAnonymous dyJj42aWMb92% (13)
- Basic PLCDokumen32 halamanBasic PLCRizwanhussain RazviBelum ada peringkat
- Group 12 ReportDokumen18 halamanGroup 12 ReportPoonam GuptaBelum ada peringkat
- PLC - Course Notes - 1Dokumen72 halamanPLC - Course Notes - 1fatihts126Belum ada peringkat
- PLC Programming Using RSLogix 500 & Industrial Applications: Learn ladder logic step by step with real-world applicationsDari EverandPLC Programming Using RSLogix 500 & Industrial Applications: Learn ladder logic step by step with real-world applicationsPenilaian: 5 dari 5 bintang5/5 (1)
- Metron Fire Pump Controls: Standard CatalogDokumen102 halamanMetron Fire Pump Controls: Standard Catalogmohammad AshrafBelum ada peringkat
- SACHS HD Clutch CatalogDokumen16 halamanSACHS HD Clutch CatalogRickN3T100% (1)
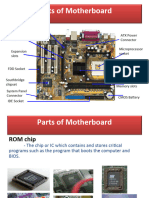
- Parts of Mother BoardDokumen17 halamanParts of Mother BoardHans De la CruzBelum ada peringkat
- Instruction Manual: Microprocessor-Based Reference Adjuster RA-70Dokumen55 halamanInstruction Manual: Microprocessor-Based Reference Adjuster RA-70luisBelum ada peringkat
- Ibafob-D: in BriefDokumen2 halamanIbafob-D: in Briefjovanma8585100% (1)
- Kearney™ Fuse Links: Technical Data 327-40Dokumen8 halamanKearney™ Fuse Links: Technical Data 327-40Emerson RigoniBelum ada peringkat
- 03 CAT CB534D Vibratory System Tech InstDokumen20 halaman03 CAT CB534D Vibratory System Tech InstMahmmod Al-QawasmehBelum ada peringkat
- Megane F7R710 ECU Pinout PDFDokumen5 halamanMegane F7R710 ECU Pinout PDFAlberto Martiniere100% (1)
- StarFish BrochureDokumen9 halamanStarFish BrochureSaepul HerdianBelum ada peringkat
- Information Technology Activity Book Prokopchuk A R Gavrilova eDokumen75 halamanInformation Technology Activity Book Prokopchuk A R Gavrilova eNatalya TushakovaBelum ada peringkat
- Helukabel m32560 en GBDokumen2 halamanHelukabel m32560 en GBelio negreteBelum ada peringkat
- Popsicle Machine Price Sheet2Dokumen12 halamanPopsicle Machine Price Sheet2Ramy ChaconBelum ada peringkat
- Wings Automobile ProductsDokumen5 halamanWings Automobile ProductsRitz AmbyyBelum ada peringkat
- TECHNICAL FehlmannDokumen5 halamanTECHNICAL FehlmannSahrul RomadonBelum ada peringkat
- GC20P-5 Sb1096e14Dokumen622 halamanGC20P-5 Sb1096e14GORD100% (1)
- Dedd of SaleMotorVehicleDokumen67 halamanDedd of SaleMotorVehicleAdie EstrelladoBelum ada peringkat
- User's Guide: Differential Thermometer DataloggerDokumen10 halamanUser's Guide: Differential Thermometer DataloggerrolandseBelum ada peringkat
- Jetweigh BrochureDokumen7 halamanJetweigh BrochureYudi ErwantaBelum ada peringkat
- Electronic Equipment With Battery Backup System Type Rarbi: Instruction Manual For Installation - Use - MaintenanceDokumen29 halamanElectronic Equipment With Battery Backup System Type Rarbi: Instruction Manual For Installation - Use - MaintenanceKhaled RabeaBelum ada peringkat
- HP Spectre - 15-DF0013DX - c06422405 PDFDokumen93 halamanHP Spectre - 15-DF0013DX - c06422405 PDFMICKEBelum ada peringkat
- ConstructiiDokumen59 halamanConstructiiAlin PuscasuBelum ada peringkat
- Electrical TWD-ModelDokumen1 halamanElectrical TWD-ModelzeshanjamilBelum ada peringkat
- SP490E/SP491E Enhanced Full Duplex RS-485 Transceivers: DescriptionDokumen12 halamanSP490E/SP491E Enhanced Full Duplex RS-485 Transceivers: DescriptionCarlos AcostaBelum ada peringkat
- Pilot CementDokumen295 halamanPilot CementjagadeeshBelum ada peringkat
- Dry Screw Compressor General Arangement Drawings - RedactedDokumen1 halamanDry Screw Compressor General Arangement Drawings - Redactedvomawew647Belum ada peringkat
- Shunt Reactor SizingDokumen4 halamanShunt Reactor Sizingrajfab100% (5)
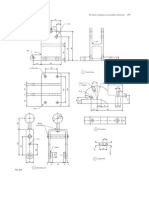
- Assembly DrawingDokumen2 halamanAssembly Drawingeuclidl75% (4)
- Honeywell 50250 HEPA Air PurifierDokumen9 halamanHoneywell 50250 HEPA Air PurifierTravisBelum ada peringkat
- 4th Computer Hardware ServicingDokumen25 halaman4th Computer Hardware ServicingShabby Gay Malala TroganiBelum ada peringkat
- Block Diagram of Intel 8086Dokumen5 halamanBlock Diagram of Intel 8086Ritesh SinghBelum ada peringkat