Anda mungkin juga menyukai
- Problem StatementDokumen9 halamanProblem StatementTauseef Gillani100% (1)
- Module2 Automatic Generation ControlDokumen29 halamanModule2 Automatic Generation ControlMichael Zontche Bernard0% (1)
- On The Possibility of A Metallic Modification of Hidrogen.Dokumen8 halamanOn The Possibility of A Metallic Modification of Hidrogen.Karlos Lds NvBelum ada peringkat
- Sodium Borohydride Fuel Cell AVRCDokumen25 halamanSodium Borohydride Fuel Cell AVRCksksirhotBelum ada peringkat
- Interactive Textbook1 1whatis MatterDokumen7 halamanInteractive Textbook1 1whatis Matterapi-240094705Belum ada peringkat
- LFC Demand RespDokumen13 halamanLFC Demand RespAmar IndraBelum ada peringkat
- Optimization and Intelligent Techniques For Electrical VehicleDokumen15 halamanOptimization and Intelligent Techniques For Electrical VehicleViswanathanBalajiBelum ada peringkat
- Power Quality Improvement in Grid-Connected Photovoltaic-Fuel Cell Based Hybrid System Using Robust Maximum Power Point Tracking ControllerDokumen17 halamanPower Quality Improvement in Grid-Connected Photovoltaic-Fuel Cell Based Hybrid System Using Robust Maximum Power Point Tracking ControllervishnuBelum ada peringkat
- Eai 7-9-2021 2314947Dokumen16 halamanEai 7-9-2021 2314947rida.hamza.muhammadBelum ada peringkat
- Thu KaramDokumen11 halamanThu KaramSumit VermaBelum ada peringkat
- Electric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. FossoDokumen18 halamanElectric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. Fossosureh32Belum ada peringkat
- A Method For Power Conditioning With Harmonic Reduction in MicrogridsDokumen6 halamanA Method For Power Conditioning With Harmonic Reduction in MicrogridsINder DǝǝpBelum ada peringkat
- Supervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyDokumen8 halamanSupervisor Control For A Stand-Alone Hybrid Generation System Using Wind and Photovoltaic EnergyMelissa MillerBelum ada peringkat
- 3 A Systematic PVQV Curves WaleedDokumen6 halaman3 A Systematic PVQV Curves Waleedwalid khanBelum ada peringkat
- Hybrid Energy SystemsDokumen15 halamanHybrid Energy SystemsChris StillBelum ada peringkat
- Review Article: Comparative Study of Maximum Power Point Tracking Techniques For Photovoltaic SystemsDokumen11 halamanReview Article: Comparative Study of Maximum Power Point Tracking Techniques For Photovoltaic SystemsramezhosnyBelum ada peringkat
- Thesis On Hybrid Energy SystemDokumen5 halamanThesis On Hybrid Energy Systemafknojbcf100% (2)
- Red DEv and Tripathi Journal PaperDokumen10 halamanRed DEv and Tripathi Journal PaperMichael Zontche BernardBelum ada peringkat
- Hybrid Renewable Energy ThesisDokumen4 halamanHybrid Renewable Energy Thesissamantharossomaha100% (2)
- Model Predictive Control of Plug-In Hybrid Electric Vehicles For Frequency Regulation in A Smart GridDokumen10 halamanModel Predictive Control of Plug-In Hybrid Electric Vehicles For Frequency Regulation in A Smart Gridmahmoud helalBelum ada peringkat
- Electrical Power and Energy Systems: Banaja Mohanty, Sidhartha Panda, P.K. HotaDokumen9 halamanElectrical Power and Energy Systems: Banaja Mohanty, Sidhartha Panda, P.K. HotasunilkumareceBelum ada peringkat
- Controller Parameters Tuning of Differential Evolution Algorithm and Its Application To Load Frequency Control of Multi-Source Power SystemDokumen9 halamanController Parameters Tuning of Differential Evolution Algorithm and Its Application To Load Frequency Control of Multi-Source Power Systemiraj FarajiBelum ada peringkat
- Advanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemDokumen11 halamanAdvanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemChristian JimenezBelum ada peringkat
- Computer Aided Optimal Sizing of Hybrid Photovoltaic Wind System For Rural Electrification in IndiaDokumen11 halamanComputer Aided Optimal Sizing of Hybrid Photovoltaic Wind System For Rural Electrification in IndiaIJERDBelum ada peringkat
- 1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceDokumen3 halaman1.optimal Placement of Multiple-Type FACTS Devices To Maximize Power System Loadability Using A Generic Graphical User InterfaceksbnBelum ada peringkat
- 2nd Control of Single-PhaseDokumen37 halaman2nd Control of Single-PhaseCaptain GamerBelum ada peringkat
- Design and Implementation of A Robust Current Controller For VSI Connected To The Grid Through An LCL FilterDokumen9 halamanDesign and Implementation of A Robust Current Controller For VSI Connected To The Grid Through An LCL Filtersandeepbabu28Belum ada peringkat
- Thesis On Wind Power GenerationDokumen7 halamanThesis On Wind Power Generationbsqfc4d5100% (2)
- Comparative Performance Analysis of Teaching Learning Based Optimization For Automatic Load Frequency Control of Multi-Source Power SystemDokumen11 halamanComparative Performance Analysis of Teaching Learning Based Optimization For Automatic Load Frequency Control of Multi-Source Power Systemiraj FarajiBelum ada peringkat
- Optimal Sizing of A Hybrid Wind/PV Plant Considering Reliability IndicesDokumen9 halamanOptimal Sizing of A Hybrid Wind/PV Plant Considering Reliability Indicesawhan0% (1)
- A New Hybrid Photovoltaic-Diesel System Control Scheme For An Isolated LoadDokumen12 halamanA New Hybrid Photovoltaic-Diesel System Control Scheme For An Isolated LoadHichem HamdiBelum ada peringkat
- Utilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulDokumen13 halamanUtilization of Non Conventional Sources of Energy With Power Quality Imrovement MLMS by Janesh PaulPrince Janesh UniqueBelum ada peringkat
- Frequency Control Large BESSDokumen4 halamanFrequency Control Large BESSClaysius DewanataBelum ada peringkat
- MehtodalgyDokumen22 halamanMehtodalgyRayhana KararBelum ada peringkat
- 29-04-2021-1619690742-6-Ijeee-6. Ijeee - FNN Based Inverter Controller For Solar Wind Hybrid Renewable Power System PDFDokumen10 halaman29-04-2021-1619690742-6-Ijeee-6. Ijeee - FNN Based Inverter Controller For Solar Wind Hybrid Renewable Power System PDFiaset123Belum ada peringkat
- Real-Time Central Demand Response For Primary Frequency Regulation in MicrogridsDokumen9 halamanReal-Time Central Demand Response For Primary Frequency Regulation in Microgrids98_kingsukBelum ada peringkat
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlDokumen10 halamanDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanBelum ada peringkat
- Shen 2014 ModelingDokumen7 halamanShen 2014 ModelingPaponson Indrachai-eaBelum ada peringkat
- Energy Management Strategies For Hybrid PV/Diesel Energy Systems: Simulation and Experimental ValidationDokumen9 halamanEnergy Management Strategies For Hybrid PV/Diesel Energy Systems: Simulation and Experimental Validationollata kalanoBelum ada peringkat
- Analysis of Unified Output MPPT Control in Subpanel PV Converter System PDFDokumen10 halamanAnalysis of Unified Output MPPT Control in Subpanel PV Converter System PDFHendrayana HendraBelum ada peringkat
- Bulk Power System Availability Assessment With Multiple Wind Power PlantsDokumen10 halamanBulk Power System Availability Assessment With Multiple Wind Power PlantsJuan David HernándezBelum ada peringkat
- He Reasons For It Are As FollowsDokumen16 halamanHe Reasons For It Are As FollowsPavan uttej RavvaBelum ada peringkat
- Design of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemDokumen9 halamanDesign of Model Predictive Controller (MPC) For Load Frequency Control (LFC) in An Interconnected Power SystemAmberMeerabBelum ada peringkat
- Hysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDokumen11 halamanHysteresis Model Predictive Control For High-Power Grid-Connected Inverters With Output LCL FilterDaniel PGBelum ada peringkat
- Literature SurveyDokumen4 halamanLiterature SurveyvishnugopalanBelum ada peringkat
- Ieee Paper FormatDokumen6 halamanIeee Paper FormatJabir SijasBelum ada peringkat
- Smart Power ManagementDokumen21 halamanSmart Power ManagementengrarBelum ada peringkat
- Energies: Reactive Power Compensation With PV Inverters For System Loss ReductionDokumen17 halamanEnergies: Reactive Power Compensation With PV Inverters For System Loss ReductionNarendra PatilBelum ada peringkat
- Literature NanoGDokumen4 halamanLiterature NanoGSujit KumarBelum ada peringkat
- Frequency and Voltage Stabilit-IRO-Journals-4 4 4Dokumen20 halamanFrequency and Voltage Stabilit-IRO-Journals-4 4 4aliebadizahedan.375Belum ada peringkat
- Improving Control Performance in DC Micro-Grids With Distributed GenerationsDokumen12 halamanImproving Control Performance in DC Micro-Grids With Distributed GenerationsmariniBelum ada peringkat
- Distributed Generation With ATP EMTP PDFDokumen6 halamanDistributed Generation With ATP EMTP PDFCarlos Lino Rojas AgüeroBelum ada peringkat
- Control and Simulation of Hybrid Power Generation System Operating in Grid Connected and Stand Alone ModeDokumen7 halamanControl and Simulation of Hybrid Power Generation System Operating in Grid Connected and Stand Alone Moderobert brownBelum ada peringkat
- GioihantinhdudoantaiDokumen10 halamanGioihantinhdudoantaiHung CaoBelum ada peringkat
- Load Frequency Control Using Demand Response and Storage Battery by Considering Renewable Energy SourcesDokumen41 halamanLoad Frequency Control Using Demand Response and Storage Battery by Considering Renewable Energy SourcesKaiba SetoBelum ada peringkat
- Electrical Power and Energy Systems: Chih-Ming Hong, Chiung-Hsing ChenDokumen8 halamanElectrical Power and Energy Systems: Chih-Ming Hong, Chiung-Hsing ChenAhsan Abbas MazariBelum ada peringkat
- CIRED2009 0518 PaperDokumen4 halamanCIRED2009 0518 PapersrivaishnaviBelum ada peringkat
- Hybrid Power Systems ThesisDokumen8 halamanHybrid Power Systems ThesisCarmen Pell100% (1)
- Blaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributDokumen12 halamanBlaabjerg, F. Teodorescu, R. Liserre, M. Timbus, A.V. - Overview of Control and Grid Synchronization For DistributPhạm Văn TưởngBelum ada peringkat
- Doi 10.1016 J.enconman.2006.04.022Dokumen9 halamanDoi 10.1016 J.enconman.2006.04.022fong jeffBelum ada peringkat
- Joint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkDari EverandJoint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkBelum ada peringkat
- Advances in Energy Systems: The Large-scale Renewable Energy Integration ChallengeDari EverandAdvances in Energy Systems: The Large-scale Renewable Energy Integration ChallengeBelum ada peringkat
- 6 Chapter 11 & 12Dokumen4 halaman6 Chapter 11 & 12Michael Zontche BernardBelum ada peringkat
- 3 Chapter 5 & 6Dokumen3 halaman3 Chapter 5 & 6Michael Zontche BernardBelum ada peringkat
- 4 Chapter 7 & 8Dokumen4 halaman4 Chapter 7 & 8Michael Zontche BernardBelum ada peringkat
- Applicant Update Form 3 2015Dokumen2 halamanApplicant Update Form 3 2015Michael Zontche BernardBelum ada peringkat
- TSDL - TOR OperDefFramework - DRAFT - Rev 11-22-10 PDFDokumen5 halamanTSDL - TOR OperDefFramework - DRAFT - Rev 11-22-10 PDFMichael Zontche BernardBelum ada peringkat
- UNBC Undergrad Fees Summer 2017Dokumen1 halamanUNBC Undergrad Fees Summer 2017Michael Zontche BernardBelum ada peringkat
- Teacher of Record (TOR) Definition FrameworkDokumen5 halamanTeacher of Record (TOR) Definition FrameworkMichael Zontche BernardBelum ada peringkat
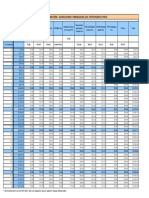
- Crude Oil in Dollars Per Barrel, Products in Dollars Per GallonDokumen1 halamanCrude Oil in Dollars Per Barrel, Products in Dollars Per GallonMichael Zontche BernardBelum ada peringkat
- Evaluation Policy: Type of Evaluation Max. Marks For Which The Exam Is Conducted MarksDokumen2 halamanEvaluation Policy: Type of Evaluation Max. Marks For Which The Exam Is Conducted MarksMichael Zontche BernardBelum ada peringkat
- Syllabus: EEE509 Power System Operation and ControlDokumen2 halamanSyllabus: EEE509 Power System Operation and ControlMichael Zontche BernardBelum ada peringkat
- Red DEv and Tripathi Journal PaperDokumen10 halamanRed DEv and Tripathi Journal PaperMichael Zontche BernardBelum ada peringkat
- Red DEV 2Dokumen2 halamanRed DEV 2Michael Zontche BernardBelum ada peringkat
- Renewable Distributed Generation - The Hidden ChallengesDokumen10 halamanRenewable Distributed Generation - The Hidden ChallengesMichael Zontche BernardBelum ada peringkat
- A Frequency Control Approach by Decentralized Generators and Loads in Power SystemsDokumen6 halamanA Frequency Control Approach by Decentralized Generators and Loads in Power SystemsMichael Zontche BernardBelum ada peringkat
- Electric Power Systems Research: Yutaka Ota, Haruhito Taniguchi, Jumpei Baba, Akihiko YokoyamaDokumen7 halamanElectric Power Systems Research: Yutaka Ota, Haruhito Taniguchi, Jumpei Baba, Akihiko YokoyamaMichael Zontche BernardBelum ada peringkat
- Course Constraints Analysis: © Deanna Davis, 2015Dokumen2 halamanCourse Constraints Analysis: © Deanna Davis, 2015Michael Zontche BernardBelum ada peringkat
- Grading Rubric PhysicsDokumen1 halamanGrading Rubric PhysicsMichael Zontche BernardBelum ada peringkat
- Microteaching Sample Lesson Plan - MathDokumen2 halamanMicroteaching Sample Lesson Plan - MathMichael Zontche Bernard75% (4)
- 2016 Spring GTLDokumen58 halaman2016 Spring GTLMichael Zontche BernardBelum ada peringkat
- Heat Tracing Basics - SLIDESDokumen31 halamanHeat Tracing Basics - SLIDESmanichenits100% (1)
- Hydrogen Generator Characteristics For Storage or Renewably Generated Energy Kotowicz 2016Dokumen16 halamanHydrogen Generator Characteristics For Storage or Renewably Generated Energy Kotowicz 2016maryjarBelum ada peringkat
- Solidification of Metals (To Be Completed) : Prof. H. K. Khaira Professor, Deptt. of MSME M.A.N.I.T., BhopalDokumen62 halamanSolidification of Metals (To Be Completed) : Prof. H. K. Khaira Professor, Deptt. of MSME M.A.N.I.T., BhopalIndranil Bhattacharyya100% (1)
- Chapter 15 Energy and Work Done HBL VERDokumen29 halamanChapter 15 Energy and Work Done HBL VERNur Hanis Md GhazaliBelum ada peringkat
- Electrical EnergyDokumen4 halamanElectrical EnergyCabal Traders100% (1)
- Solar Power Plant Using Parabolic Trough Model Predictive Control Controlling Outlet TemperatureDokumen24 halamanSolar Power Plant Using Parabolic Trough Model Predictive Control Controlling Outlet TemperatureirinmichaelBelum ada peringkat
- Phases of Matter WebquestDokumen6 halamanPhases of Matter Webquestapi-169639475Belum ada peringkat
- Reflective EssayDokumen5 halamanReflective Essayapi-249555563Belum ada peringkat
- Energy Resource and ManagementDokumen43 halamanEnergy Resource and ManagementMaham MansoorBelum ada peringkat
- RAEC Capability Final PDFDokumen0 halamanRAEC Capability Final PDFkggganiBelum ada peringkat
- Accugas Company Profile v2Dokumen6 halamanAccugas Company Profile v2Oribuyaku DamiBelum ada peringkat
- PRIMOTECH - Solar Water HeaterDokumen14 halamanPRIMOTECH - Solar Water HeaterPrimotech EnergyBelum ada peringkat
- Si-Con 4X Low Concentration PV: Technology of The FutureDokumen2 halamanSi-Con 4X Low Concentration PV: Technology of The FutureRoberto Ignacio DíazBelum ada peringkat
- CCPP 2 Thermal Audit Report PDFDokumen61 halamanCCPP 2 Thermal Audit Report PDFRagesh JoshiBelum ada peringkat
- Renewable EnergyDokumen44 halamanRenewable EnergyRonak Shah0% (1)
- Eat Transfer Coefficients For Submerged CoilsDokumen13 halamanEat Transfer Coefficients For Submerged Coilsvitcon87100% (1)
- PhosphorescenceDokumen18 halamanPhosphorescencePraveen KumarBelum ada peringkat
- Physics I Problems PDFDokumen1 halamanPhysics I Problems PDFBOSS BOSSBelum ada peringkat
- Final Exam in PhysicsDokumen5 halamanFinal Exam in Physicsmvmbapple0% (1)
- Xiao-Gang Wen - Introduction To Quantum Many-Boson Theory - A Theory of Almost EverythingDokumen63 halamanXiao-Gang Wen - Introduction To Quantum Many-Boson Theory - A Theory of Almost EverythingSwertyyBelum ada peringkat
- Renewable Energy Storage With Liquid Metal Batteries PublicDokumen3 halamanRenewable Energy Storage With Liquid Metal Batteries Publicapi-349473348Belum ada peringkat
- Thesis List PDFDokumen3 halamanThesis List PDFMuhammad NomanBelum ada peringkat
- Lengths To Be Measured Instruments AccuracyDokumen2 halamanLengths To Be Measured Instruments AccuracyHomework SucksBelum ada peringkat
- PVWatts CalculatorDokumen2 halamanPVWatts CalculatorCristi GrosuBelum ada peringkat
- Ms - Moses Classwork Nov. 22 2016Dokumen6 halamanMs - Moses Classwork Nov. 22 2016Anna Lyse MosesBelum ada peringkat
- BBC - GCSE Bitesize - Types of RadiationDokumen2 halamanBBC - GCSE Bitesize - Types of RadiationinejattBelum ada peringkat
- Physics II Problems PDFDokumen1 halamanPhysics II Problems PDFBOSS BOSSBelum ada peringkat