Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- 2uz-Fe Engine PDFDokumen130 halaman2uz-Fe Engine PDFCesar Tan Bermejo III71% (7)
- GranCabrio enDokumen97 halamanGranCabrio enaiigee88% (8)
- Nissan X-Trail T30 ABS Service ManualDokumen126 halamanNissan X-Trail T30 ABS Service ManualSergey Velychko80% (10)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Audi A4 A5 Q5 B8 ABS MVB Measuring Value Blocks PDFDokumen10 halamanAudi A4 A5 Q5 B8 ABS MVB Measuring Value Blocks PDFMohammed MochrifBelum ada peringkat
- Toyota Yaris Owner's Manual PDFDokumen572 halamanToyota Yaris Owner's Manual PDFKyaw Myat Noe AungBelum ada peringkat
- Opel InsigniaDokumen13 halamanOpel Insigniadimsakel0% (1)
- Vas TutorialDokumen50 halamanVas TutorialGhassan AlasmarBelum ada peringkat
- Traction Control Warning Light, On Cascada - Google SearchDokumen1 halamanTraction Control Warning Light, On Cascada - Google SearchMarian BeasleyBelum ada peringkat
- PDF Mercedes Benz Sensotronic Brake Control SBC CompressDokumen21 halamanPDF Mercedes Benz Sensotronic Brake Control SBC CompressArga PRBelum ada peringkat
- Diagram 2 BCMDokumen1 halamanDiagram 2 BCMwnsdBelum ada peringkat
- BL Ga500 01 PDFDokumen9 halamanBL Ga500 01 PDFTin RamosBelum ada peringkat
- Spec Card M5 Competition 20220124Dokumen2 halamanSpec Card M5 Competition 20220124ThomasSatrioRafflesBelum ada peringkat
- BLHeli Programming by TX SiLabs Rev10.xDokumen21 halamanBLHeli Programming by TX SiLabs Rev10.xTitiBelum ada peringkat
- 15RHD PDFDokumen583 halaman15RHD PDFZahid BabaićBelum ada peringkat
- Range Rover Discovery 4Dokumen55 halamanRange Rover Discovery 4ofilipBelum ada peringkat
- 488gt PDFDokumen270 halaman488gt PDFbrayan duarte100% (1)
- Ford Ecosport: East MalaysiaDokumen2 halamanFord Ecosport: East MalaysiaAlexander Noah A MBelum ada peringkat
- Brake Control System: SectionDokumen317 halamanBrake Control System: SectionnyanhtunlimBelum ada peringkat
- MLand Cruiser V8 FullreleaseDokumen30 halamanMLand Cruiser V8 FullreleaseKo PunyaBelum ada peringkat
- The BMW X1 Brochure October 15 PDFDokumen27 halamanThe BMW X1 Brochure October 15 PDFDellon PetersBelum ada peringkat
- Kicks Turbo: 127 Touchpoints With 113 Workshops Spread Across 109 CitiesDokumen18 halamanKicks Turbo: 127 Touchpoints With 113 Workshops Spread Across 109 CitiesZoeb MerchantBelum ada peringkat
- h6 Brochure WebDokumen9 halamanh6 Brochure Webmax DörrBelum ada peringkat
- 2017 BMW R Ninet Scrambler 71662Dokumen163 halaman2017 BMW R Ninet Scrambler 71662Anas KhanBelum ada peringkat
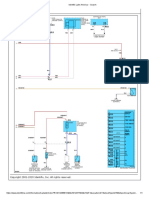
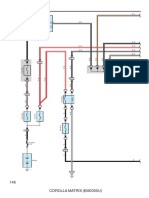
- Cruise Control: 146 Corolla Matrix (Em0350U)Dokumen6 halamanCruise Control: 146 Corolla Matrix (Em0350U)Cejas MicroBelum ada peringkat
- 2006 Cadillac Escalade BrochureDokumen35 halaman2006 Cadillac Escalade Brochureruizar28Belum ada peringkat
- An Electric Vehicle Model and Validation Using A Nissan Leaf A Python-Based Object-Oriented Programming ApproachDokumen7 halamanAn Electric Vehicle Model and Validation Using A Nissan Leaf A Python-Based Object-Oriented Programming Approachadityasinghal08Belum ada peringkat
- 2009 Ford Taurus Brochure From Miller FordDokumen12 halaman2009 Ford Taurus Brochure From Miller FordMiller FordBelum ada peringkat
- Tesla EDR SampleDokumen18 halamanTesla EDR SampleRob TheDriveBelum ada peringkat
- BRCDokumen237 halamanBRCHitachiBelum ada peringkat