Anda mungkin juga menyukai
- Stability of Discrete Non-conservative SystemsDari EverandStability of Discrete Non-conservative SystemsPenilaian: 1 dari 5 bintang1/5 (1)
- Interpolation Functors and Interpolation SpacesDari EverandInterpolation Functors and Interpolation SpacesBelum ada peringkat
- The Wavelet Tutorial Part III by Robi PolikarDokumen29 halamanThe Wavelet Tutorial Part III by Robi PolikarAbdullah Bin QueyamBelum ada peringkat
- Introduction To WaveletDokumen44 halamanIntroduction To WaveletSurya KalidindiBelum ada peringkat
- An Introduction To Discrete Wavelet TransformsDokumen36 halamanAn Introduction To Discrete Wavelet TransformsAtacan ÖzkanBelum ada peringkat
- Introduction To Wavelets and Wavelet Transforms - A Primer, Brrus C. S., 1998.Dokumen281 halamanIntroduction To Wavelets and Wavelet Transforms - A Primer, Brrus C. S., 1998.Srikanth Varanasi100% (3)
- LINEAR TRANSFORMATION DEFINITIONDokumen19 halamanLINEAR TRANSFORMATION DEFINITIONJinky CanitanBelum ada peringkat
- Z TransformDokumen156 halamanZ TransformMohammad Rameez100% (1)
- FFT Window Functions - Limits On FFT AnalysisDokumen4 halamanFFT Window Functions - Limits On FFT AnalysisA. VillaBelum ada peringkat
- Biorthogonal WaveletsDokumen23 halamanBiorthogonal WaveletsNavaneeth PayyanurBelum ada peringkat
- FFT and DFT Analysis of SignalsDokumen42 halamanFFT and DFT Analysis of SignalsHuynh BachBelum ada peringkat
- Median FilteringDokumen30 halamanMedian FilteringK.R.RaguramBelum ada peringkat
- (Forum For Interdisciplinary Mathematics) Khalil Ahmad, Abdullah-Wavelet Packets and Their Statistical Applications-Springer Singapore (2018)Dokumen249 halaman(Forum For Interdisciplinary Mathematics) Khalil Ahmad, Abdullah-Wavelet Packets and Their Statistical Applications-Springer Singapore (2018)MARCUS.VARANIS8748Belum ada peringkat
- Wavelet Methods For Time Series AnalysisDokumen45 halamanWavelet Methods For Time Series Analysisbogdan.oancea3651Belum ada peringkat
- Advanced Mathcad Eda, Incorporated: SpecialtiesDokumen10 halamanAdvanced Mathcad Eda, Incorporated: SpecialtiesggBelum ada peringkat
- Introducing Deep Learning With MATLABDokumen15 halamanIntroducing Deep Learning With MATLABFranco Armando Piña GuevaraBelum ada peringkat
- Static Analysis of Timoshenko Beams Using Isogeometric ApproachDokumen9 halamanStatic Analysis of Timoshenko Beams Using Isogeometric ApproachcapicaBelum ada peringkat
- Cross CorrelationTheoryDokumen6 halamanCross CorrelationTheoryanima1982Belum ada peringkat
- Wavelet LecturesDokumen46 halamanWavelet Lecturesnitrosc16703Belum ada peringkat
- Noise NotesDokumen89 halamanNoise NotesRaj AnBelum ada peringkat
- Solitons IntroDokumen8 halamanSolitons Intromexicanu99Belum ada peringkat
- Fourier TransformDokumen63 halamanFourier Transformresmi_ng100% (2)
- Wavelets and Filter Banks: A Concise IntroductionDokumen4 halamanWavelets and Filter Banks: A Concise IntroductionDojima1205Belum ada peringkat
- Real-Time Analysis, in SuperCollider, of Spectral Features of Electroglottographic Signals DENNIS JOHANSSONDokumen71 halamanReal-Time Analysis, in SuperCollider, of Spectral Features of Electroglottographic Signals DENNIS JOHANSSONMichael Przybylski100% (1)
- Paradox Magellan-Catalog enDokumen11 halamanParadox Magellan-Catalog enCornelCiorcanBelum ada peringkat
- Wavelets for Kids: A Tutorial IntroductionDokumen26 halamanWavelets for Kids: A Tutorial IntroductionFredenandEcheverríaBelum ada peringkat
- Nonlinear Differential Equations: Invariance, Stability, and BifurcationDari EverandNonlinear Differential Equations: Invariance, Stability, and BifurcationPiero de MottoniBelum ada peringkat
- Underwater Communications: Milica Stojanovic Massachusetts Institute of Technology Millitsa@mit - EduDokumen16 halamanUnderwater Communications: Milica Stojanovic Massachusetts Institute of Technology Millitsa@mit - EduMansi JainBelum ada peringkat
- Time Series Models With Discrete Wavelet TransformDokumen11 halamanTime Series Models With Discrete Wavelet TransformAkash RajBelum ada peringkat
- DWT - Discrete wavelet transform overviewDokumen9 halamanDWT - Discrete wavelet transform overviewid.priyanka0% (2)
- Universityof Surrey EnglandDokumen5 halamanUniversityof Surrey EnglandPhinah RoseBelum ada peringkat
- MATLAB Image Processing WorkshopDokumen52 halamanMATLAB Image Processing WorkshopAmarjeetsingh ThakurBelum ada peringkat
- 02 WholeDokumen306 halaman02 Wholea2kjaoBelum ada peringkat
- (DFT) Julius O. Smith III-Mathematics of The Discrete Fourier Transform-W3K Publishing (2003)Dokumen431 halaman(DFT) Julius O. Smith III-Mathematics of The Discrete Fourier Transform-W3K Publishing (2003)Binar SuryaBelum ada peringkat
- (Mathematical Engineering) Ülo Lepik, Helle Hein (Auth.) - Haar Wavelets - With Applications-Springer International Publishing (2014)Dokumen209 halaman(Mathematical Engineering) Ülo Lepik, Helle Hein (Auth.) - Haar Wavelets - With Applications-Springer International Publishing (2014)Anita Pal100% (2)
- CIC filters overview: frequency response and implementation of comb-integrator filtersDokumen14 halamanCIC filters overview: frequency response and implementation of comb-integrator filtersbrufoBelum ada peringkat
- Advanced Digital Signal ProcessingDokumen125 halamanAdvanced Digital Signal ProcessingJaopinzz UncBelum ada peringkat
- Understanding FFTs and WindowingDokumen15 halamanUnderstanding FFTs and WindowingSamruddha ThakurBelum ada peringkat
- New Substractive Synthesis of Violin Sound1Dokumen6 halamanNew Substractive Synthesis of Violin Sound1ARVINDBelum ada peringkat
- Practice Chap 1 PDFDokumen17 halamanPractice Chap 1 PDFliu allenBelum ada peringkat
- Tunedmassdamper PDFDokumen3 halamanTunedmassdamper PDFJinho JungBelum ada peringkat
- A Spatial Median Filter For Noise Removal in Digital ImagesDokumen14 halamanA Spatial Median Filter For Noise Removal in Digital Imagessridharnag100% (1)
- B Spline Interpolation and ApproximationDokumen94 halamanB Spline Interpolation and ApproximationbktvvkBelum ada peringkat
- Wavelet TransformDokumen27 halamanWavelet TransformMuhammad Salman100% (1)
- Basics of Seismic Wave TheoryDokumen154 halamanBasics of Seismic Wave TheoryYinfeng Dong0% (1)
- Real-Time Sound Similarity Synthesis by PDFDokumen6 halamanReal-Time Sound Similarity Synthesis by PDFStefano FranceschiniBelum ada peringkat
- Automatic Rhythmic Performance in MaxMSPDokumen4 halamanAutomatic Rhythmic Performance in MaxMSPdesearcherBelum ada peringkat
- Fourier AnalysisDokumen24 halamanFourier AnalysisEustahije BrzicBelum ada peringkat
- Levinson and Durbin AlgorithmDokumen4 halamanLevinson and Durbin AlgorithmPrathmesh P SakhadeoBelum ada peringkat
- 10kw - Drawing - Dimensions JM1 Brushless Motor (Joby Motors) PDFDokumen2 halaman10kw - Drawing - Dimensions JM1 Brushless Motor (Joby Motors) PDFVictor HugoBelum ada peringkat
- UNIT - 3: Fast-Fourier-Transform (FFT) Algorithms: Dr. Manjunatha. PDokumen100 halamanUNIT - 3: Fast-Fourier-Transform (FFT) Algorithms: Dr. Manjunatha. PMVRajeshMaliyeckalBelum ada peringkat
- Livi R., Vulpiani A.-The Kolmogorov Legacy in Physics A Century of Turbulence and Complexity-Springer (2003)Dokumen257 halamanLivi R., Vulpiani A.-The Kolmogorov Legacy in Physics A Century of Turbulence and Complexity-Springer (2003)Aicha Chorak Franky TissoukiBelum ada peringkat
- Rayleigh WaveDokumen5 halamanRayleigh WaveGabo BogaBelum ada peringkat
- 10 1 1 391 1581Dokumen151 halaman10 1 1 391 1581Papadakis ChristosBelum ada peringkat
- Non Linear Solver Arc Length ControlDokumen26 halamanNon Linear Solver Arc Length Controlashok.whyo100% (1)
- Functions of a Complex Variable and Some of Their ApplicationsDari EverandFunctions of a Complex Variable and Some of Their ApplicationsBelum ada peringkat
- Electrical Overstress (EOS): Devices, Circuits and SystemsDari EverandElectrical Overstress (EOS): Devices, Circuits and SystemsBelum ada peringkat
- Initial-Boundary Value Problems and the Navier-Stokes EquationsDari EverandInitial-Boundary Value Problems and the Navier-Stokes EquationsBelum ada peringkat
- 8086 TheoryDokumen8 halaman8086 TheoryHardik DoshiBelum ada peringkat
- Butterworth Filter CoefficeintsDokumen10 halamanButterworth Filter CoefficeintspowerextremeBelum ada peringkat
- Wavelet Transform Tutorial Part4Dokumen12 halamanWavelet Transform Tutorial Part4powerextremeBelum ada peringkat
- Wavelet Transform Tutorial Part2Dokumen20 halamanWavelet Transform Tutorial Part2powerextremeBelum ada peringkat
- Wavelet Transform Tutorial Part3Dokumen32 halamanWavelet Transform Tutorial Part3powerextremeBelum ada peringkat
- File Handling, GUIs and Neural Networks in Matlab-An IntroductionDokumen40 halamanFile Handling, GUIs and Neural Networks in Matlab-An IntroductionpowerextremeBelum ada peringkat
- Ee 324 L Simulation Laboratory: Electrical Engineering Department, National Institute of Technology Calicut Year 2004Dokumen5 halamanEe 324 L Simulation Laboratory: Electrical Engineering Department, National Institute of Technology Calicut Year 2004Praveen Kumar ReddyBelum ada peringkat
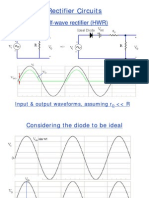
- Rectifier Circuits: Half-Wave Rectifier (HWR)Dokumen18 halamanRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifBelum ada peringkat
- OEB204700 ENodeB LTE V100R006 Local Commissioning ISSUE 1.00Dokumen41 halamanOEB204700 ENodeB LTE V100R006 Local Commissioning ISSUE 1.00Mel ZikiBelum ada peringkat
- Ultimate Valve User Manual V1.3Dokumen18 halamanUltimate Valve User Manual V1.3Agus MulyadiBelum ada peringkat
- Information Coding Techniques Question BankDokumen10 halamanInformation Coding Techniques Question BankManikandan ArunachalamBelum ada peringkat
- Universal Intelligent Controller: UIC-CX9330A (B) Series Screw Air Compressor ControllerDokumen48 halamanUniversal Intelligent Controller: UIC-CX9330A (B) Series Screw Air Compressor Controllerchairul wahidBelum ada peringkat
- Installation Manual 3ats, 3adts, 3Nts, 3Ndts G-Design 1600-3200 A Transfer SwitchesDokumen8 halamanInstallation Manual 3ats, 3adts, 3Nts, 3Ndts G-Design 1600-3200 A Transfer SwitchesMahmoud M.AbdelalimBelum ada peringkat
- Walker Ultrasonic Wind Sensor2080Dokumen2 halamanWalker Ultrasonic Wind Sensor2080bobBelum ada peringkat
- NEET 2023 Set-E5 Answer KeyDokumen29 halamanNEET 2023 Set-E5 Answer KeyChristopher NolanBelum ada peringkat
- 3G WhitepaperDokumen7 halaman3G WhitepaperdeeptisomaniBelum ada peringkat
- Satellite communication MCQ bank overviewDokumen68 halamanSatellite communication MCQ bank overviewهانيالنويرةBelum ada peringkat
- Modeling & Simulation of Spherical Robot Configuration Using Solidworks & MatlabDokumen3 halamanModeling & Simulation of Spherical Robot Configuration Using Solidworks & Matlabkarthi0% (1)
- W12 Engine Self Study ProgramDokumen68 halamanW12 Engine Self Study ProgramMike SmithBelum ada peringkat
- COOLER MASTER - Silencio S600Dokumen2 halamanCOOLER MASTER - Silencio S600casogerardoBelum ada peringkat
- R8D0-MIO-Ex12.FF ManualDokumen57 halamanR8D0-MIO-Ex12.FF ManualrifervizBelum ada peringkat
- Kendall ECG Electrodes Product Data Sheet: Arbo H124SG Ref. Code: 31.1245.21Dokumen2 halamanKendall ECG Electrodes Product Data Sheet: Arbo H124SG Ref. Code: 31.1245.21maria jose rodriguez lopezBelum ada peringkat
- Nvdimm Vs DimmDokumen25 halamanNvdimm Vs DimmmanBelum ada peringkat
- Moxa Eds P206a Series Datasheet v1.0Dokumen5 halamanMoxa Eds P206a Series Datasheet v1.0Fernando Cabrera MichelBelum ada peringkat
- (IJCST-V5I6P3) :ms. Guddeti Divya Rani, A.RaviDokumen8 halaman(IJCST-V5I6P3) :ms. Guddeti Divya Rani, A.RaviEighthSenseGroupBelum ada peringkat
- Morse CodeDokumen22 halamanMorse CodekulcapsBelum ada peringkat
- Dual Axis Solar Tracking System-A Comprehensive Study: Bangladesh ContextDokumen7 halamanDual Axis Solar Tracking System-A Comprehensive Study: Bangladesh ContextLEEBelum ada peringkat
- Lab 8Dokumen9 halamanLab 8hamoodBelum ada peringkat
- HH100-HH120 English PDFDokumen18 halamanHH100-HH120 English PDFsil doroBelum ada peringkat
- Digit Vol 15 Issue 09 September 2015Dokumen132 halamanDigit Vol 15 Issue 09 September 2015SaileshBelum ada peringkat
- Power 1 Form A: Features Typical ApplicationsDokumen8 halamanPower 1 Form A: Features Typical ApplicationsShainameBelum ada peringkat
- Semester Basic Electronics 11thDokumen12 halamanSemester Basic Electronics 11thSunil ShekharBelum ada peringkat
- Physical Unclonable Function (PUF) Based Random Number GeneratorDokumen7 halamanPhysical Unclonable Function (PUF) Based Random Number GeneratorAnonymous IlrQK9HuBelum ada peringkat
- Final Report On I7Dokumen47 halamanFinal Report On I7Avneeshwar SinghBelum ada peringkat
- Simulation and Study of A DC-DC BOOST Converter Controlled by Arduino - LAALMI MiloudDokumen66 halamanSimulation and Study of A DC-DC BOOST Converter Controlled by Arduino - LAALMI MiloudHani MatiBelum ada peringkat
- Magnavox 32MF338BDokumen93 halamanMagnavox 32MF338BJames SouthBelum ada peringkat