Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- 3 MC HL Armored 5 8 KV Epr 3 ConductorsDokumen1 halaman3 MC HL Armored 5 8 KV Epr 3 ConductorsJavier MaldonadoBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 4 MC Armored 5 8 KV Epr 3 ConductorsDokumen1 halaman4 MC Armored 5 8 KV Epr 3 ConductorsJavier MaldonadoBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- A Comparison of Techniques For Measurement of Shaft Currents in Rotating MachinesDokumen5 halamanA Comparison of Techniques For Measurement of Shaft Currents in Rotating MachinesJavier MaldonadoBelum ada peringkat
- ETAP FAQ Export Protective Device To Excel PDFDokumen2 halamanETAP FAQ Export Protective Device To Excel PDFJavier MaldonadoBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Design Considerations For An Inverter Output Filter To Mitigate The Effects of Long Motor Leads IDokumen8 halamanDesign Considerations For An Inverter Output Filter To Mitigate The Effects of Long Motor Leads IJavier MaldonadoBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- ASPEN Software - Introduction: Assignment #6 - Intro To ASPEN Software & Using It To Solve Assignment #4Dokumen5 halamanASPEN Software - Introduction: Assignment #6 - Intro To ASPEN Software & Using It To Solve Assignment #4Javier MaldonadoBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Protective Transformers: by N.H, Shton, Revised by E.J.MellorDokumen31 halamanProtective Transformers: by N.H, Shton, Revised by E.J.MellorJavier MaldonadoBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- A Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersDokumen4 halamanA Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersJavier MaldonadoBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- ETAP FAQ Load TorqueDokumen2 halamanETAP FAQ Load TorqueJavier MaldonadoBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- A Verilog Piecewise-Linear Analog Behavior Model For Mixed-Signal ValidationDokumen7 halamanA Verilog Piecewise-Linear Analog Behavior Model For Mixed-Signal ValidationHyunGoo LeeBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Olivares J Tues 03 TransistorsDokumen7 halamanOlivares J Tues 03 TransistorsJonathan OlivaresBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Research Paper On PN JunctionDokumen4 halamanResearch Paper On PN Junctionogisxnbnd100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Commutation Torque Ripple Reduction in Brushless DC Motor Using Modified SEPIC ConverterDokumen6 halamanCommutation Torque Ripple Reduction in Brushless DC Motor Using Modified SEPIC ConverterSrinath VelavanBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Power Factor Correction AC-DC ConverterDokumen5 halamanPower Factor Correction AC-DC Convertermatadamahesh1Belum ada peringkat
- Org A No Metallic CompoundsDokumen17 halamanOrg A No Metallic Compoundsthestar55100% (2)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- AC Dimmer: Components RequiredDokumen8 halamanAC Dimmer: Components Requiredovais123Belum ada peringkat
- LSIS - Molded Case Circuit Breaker (MCCB) - CatalogDokumen140 halamanLSIS - Molded Case Circuit Breaker (MCCB) - CatalogNguyen LuongBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Multipler ppt-1Dokumen18 halamanMultipler ppt-1Harish NagulapalliBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Códigos de Error MicroMotionDokumen2 halamanCódigos de Error MicroMotionCarlos Zamyr GonzalezBelum ada peringkat
- 14nm - 16nm Processes PDFDokumen1 halaman14nm - 16nm Processes PDFGagandeep Singh DhingraBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
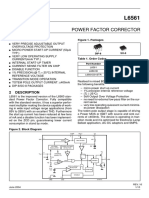
- Power Factor Corrector: 1 FeaturesDokumen13 halamanPower Factor Corrector: 1 Featuresdeilyn rivasBelum ada peringkat
- Laboratory Exercise 2Dokumen5 halamanLaboratory Exercise 2BriNyanBelum ada peringkat
- Applied Physics AssignmentDokumen3 halamanApplied Physics AssignmentareejBelum ada peringkat
- Diode Equation and ModelsDokumen24 halamanDiode Equation and ModelsJayann GonzalesBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Logic Families MCQs SimpleDokumen8 halamanLogic Families MCQs SimplebijukumargBelum ada peringkat
- Circuit L9302-ACDokumen1 halamanCircuit L9302-ACRIDHADBelum ada peringkat
- Lightning and Earthing Protection SystemDokumen3 halamanLightning and Earthing Protection SystemFarah Wahidah MazlanBelum ada peringkat
- Utc Lm78Xx Linear Integrated Circuit: 3-Terminal 1A Positive Voltage RegulatorDokumen6 halamanUtc Lm78Xx Linear Integrated Circuit: 3-Terminal 1A Positive Voltage Regulatorapi-19786583Belum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- FreeBitcoin Script Roll 10000Dokumen4 halamanFreeBitcoin Script Roll 10000Jesus UB0% (1)
- HW 1Dokumen5 halamanHW 1BrimwoodboyBelum ada peringkat
- HD44780 1602 16x2 LCD Display ModuleDokumen26 halamanHD44780 1602 16x2 LCD Display ModuleDaniel Oliveira100% (1)
- Mosfet'S: From Microelectronic Circuits Text by Sedra and Smith Oxford PublishingDokumen29 halamanMosfet'S: From Microelectronic Circuits Text by Sedra and Smith Oxford PublishingKomay Abo ShakraBelum ada peringkat
- Circuit Board Layout Guidelines For Class-D AmplifiersDokumen4 halamanCircuit Board Layout Guidelines For Class-D AmplifiersXavi AlonsoBelum ada peringkat
- Paper LC Vco SohiniDokumen5 halamanPaper LC Vco SohiniDr-Umakanta NandaBelum ada peringkat
- 6-DZ F-12 12V 12ah Vrla Gel Battery: Features & BenefitsDokumen2 halaman6-DZ F-12 12V 12ah Vrla Gel Battery: Features & BenefitsAnonymous AJlmqhTmUqBelum ada peringkat
- Full Bridge ConverterDokumen7 halamanFull Bridge ConverterPalinda AttanayakeBelum ada peringkat
- Monitor Bee Supported CamerasDokumen7 halamanMonitor Bee Supported CamerasmonitorBeeBelum ada peringkat
- Microwave Engineering: S.Prabhu Das Associate Professor ECE DepartmentDokumen196 halamanMicrowave Engineering: S.Prabhu Das Associate Professor ECE Departmentprabhudas ceccBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- CircuitiKz ManualDokumen137 halamanCircuitiKz ManualChristiensen ArandillaBelum ada peringkat