Anda mungkin juga menyukai
- Ejercicios GrafcetDokumen4 halamanEjercicios GrafcetRonald Eder Chavez Palomino100% (2)
- Ejercicios PLCDokumen9 halamanEjercicios PLCRodrigoBelum ada peringkat
- Problemas T7 PDFDokumen23 halamanProblemas T7 PDFcuyonen100% (1)
- Examen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDokumen14 halamanExamen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDarwin Yonel Mamani SalcedoBelum ada peringkat
- Ejercicios de Grafcet PDFDokumen69 halamanEjercicios de Grafcet PDFdizzelmx83% (6)
- Ejercicios de Grafcet - AdaptadosDokumen54 halamanEjercicios de Grafcet - AdaptadosAsier Sabin De Ormaetxea Garaizar100% (1)
- Sencillo Ejemplo de Programación Grafcet BienDokumen10 halamanSencillo Ejemplo de Programación Grafcet BienshamBelum ada peringkat
- EJERCICIO 19 GRAFCET - ResueltoDokumen6 halamanEJERCICIO 19 GRAFCET - ResueltoJosep Chicori50% (2)
- Practica 30. Proceso de Electrolisis. SoluciónDokumen3 halamanPractica 30. Proceso de Electrolisis. SoluciónPatriciaBlázquezGarcía100% (1)
- Práctica 27. Estación de Alimentación. SoluciónDokumen3 halamanPráctica 27. Estación de Alimentación. SoluciónPatriciaBlázquezGarcíaBelum ada peringkat
- Problemas GrafcetDokumen9 halamanProblemas GrafcetShara CruzBelum ada peringkat
- Practica. Detección y Expulsión de Botellas Sin TaponDokumen3 halamanPractica. Detección y Expulsión de Botellas Sin TaponPatriciaBlázquezGarcíaBelum ada peringkat
- Grafcet LibroDokumen50 halamanGrafcet Libroallan_bergel100% (1)
- Práctica. Planta de ReposteríaDokumen11 halamanPráctica. Planta de ReposteríaPatriciaBlázquezGarcía100% (2)
- Ejercicios Programacion GrafetDokumen25 halamanEjercicios Programacion Grafetccreicar222Belum ada peringkat
- PLC Ii 5 Señales Analogicas AlumnoDokumen23 halamanPLC Ii 5 Señales Analogicas Alumnoroboan100% (1)
- Tema5 Ejercicios GrafcetDokumen32 halamanTema5 Ejercicios GrafcetKoko EsclntBelum ada peringkat
- Ejercicios Grafcet 1Dokumen9 halamanEjercicios Grafcet 1fragaenrique75% (4)
- Ejercicios de PLCDokumen25 halamanEjercicios de PLCCarolina Solis0% (2)
- Ejercicios PLC III Manejo de Señales AnalogicasDokumen6 halamanEjercicios PLC III Manejo de Señales AnalogicasSteevens GarridoBelum ada peringkat
- Practicas para PLCDokumen14 halamanPracticas para PLCMiguel AguilarBelum ada peringkat
- GRAFCET EcuacionesDokumen36 halamanGRAFCET EcuacionesjavierBelum ada peringkat
- T2 - Ejercicios Grafcet 2Dokumen6 halamanT2 - Ejercicios Grafcet 2rufiniusBelum ada peringkat
- Practica 7 AutomatizacionDokumen10 halamanPractica 7 AutomatizacionMariam ramirezBelum ada peringkat
- Proyectos de Automatizacic3b3n para Cpu s7 1200Dokumen21 halamanProyectos de Automatizacic3b3n para Cpu s7 1200Javier RubioBelum ada peringkat
- S7-1200 y Simulador PLCSIM en TIA Portal V13 SP1Dokumen8 halamanS7-1200 y Simulador PLCSIM en TIA Portal V13 SP1faspBelum ada peringkat
- Problemas de PLCDokumen8 halamanProblemas de PLCMelissa100% (2)
- Diagrama de FlujoDokumen15 halamanDiagrama de FlujoAlmacana666Belum ada peringkat
- Problemas de AutomatizaciónDokumen7 halamanProblemas de AutomatizaciónKarol GuzmanBelum ada peringkat
- TALLERn2nDEnLOGICAnPROGRAMABLE 316395f5f03c64eDokumen6 halamanTALLERn2nDEnLOGICAnPROGRAMABLE 316395f5f03c64ejean paul gonzalezBelum ada peringkat
- D2 Graceft LeoneladelaASDokumen7 halamanD2 Graceft LeoneladelaASMarcos BarraganBelum ada peringkat
- Ejercicios Señales Digitales 2.Dokumen7 halamanEjercicios Señales Digitales 2.JesúsTelloGarciaBelum ada peringkat
- Ejercicios 9 10 11Dokumen4 halamanEjercicios 9 10 11Andrés Garcés CBelum ada peringkat
- Tercer Mes PLCDokumen6 halamanTercer Mes PLCDolores FuertesBelum ada peringkat
- PLCDokumen2 halamanPLCleonela salinas100% (1)
- Problemas de Automatizaciòn 2012-1Dokumen14 halamanProblemas de Automatizaciòn 2012-1EdwinRosarioGabrielBelum ada peringkat
- Ejercicios Tercer ParcialDokumen5 halamanEjercicios Tercer ParcialRodrigoBelum ada peringkat
- Taller LadderDokumen6 halamanTaller LadderLuis Felipe Muñoz PrietoBelum ada peringkat
- Guia 5 - Casos de Problemas Automatizacion PLCDokumen12 halamanGuia 5 - Casos de Problemas Automatizacion PLCEdward Correa100% (1)
- Taller Ladder 2022-1Dokumen8 halamanTaller Ladder 2022-1David BenavidezBelum ada peringkat
- Tarea 2023 - 1 Microcontroladores Segundo Parcial Unidad 3Dokumen7 halamanTarea 2023 - 1 Microcontroladores Segundo Parcial Unidad 3SAUL MUÑOZBelum ada peringkat
- Practicas Control 2Dokumen8 halamanPracticas Control 2luisBelum ada peringkat
- Plcguia UdecDokumen3 halamanPlcguia Udecemersonq2003Belum ada peringkat
- Ejercicios para PLCDokumen3 halamanEjercicios para PLCIng Jhoseprocker AvilesBelum ada peringkat
- Problemas de PLC. (Guía Evaluada)Dokumen8 halamanProblemas de PLC. (Guía Evaluada)Fabián ToledoBelum ada peringkat
- ACFrOgCfu-lbULIzTEJi5tK-qS97i-TjJfo 4UuPW5O 1LITp2UKF Q3Aa0m3RX9 R3XTWenqYMobDdEhPI0e6tW smXzK8Iv23TrUYgPOQYcDTtsyx6AvoWHTHKQwIpHCm9-p1Kf9lKIK8ili8YDokumen2 halamanACFrOgCfu-lbULIzTEJi5tK-qS97i-TjJfo 4UuPW5O 1LITp2UKF Q3Aa0m3RX9 R3XTWenqYMobDdEhPI0e6tW smXzK8Iv23TrUYgPOQYcDTtsyx6AvoWHTHKQwIpHCm9-p1Kf9lKIK8ili8YJuan ZeballosBelum ada peringkat
- Guia 5 - Casos de Problemas Automatizacion PLC PDFDokumen3 halamanGuia 5 - Casos de Problemas Automatizacion PLC PDFceluis vargas0% (1)
- BoletínDokumen21 halamanBoletínTed D. ChedaBelum ada peringkat
- Examen Semestral 2022 Grupo 254Dokumen3 halamanExamen Semestral 2022 Grupo 254FranciscoJavierUrietaGarcíaBelum ada peringkat
- Guía 5 - Casos de Problemas Automatización Con PLCDokumen12 halamanGuía 5 - Casos de Problemas Automatización Con PLCBilly FisherBelum ada peringkat
- Problemas Eventos DiscretosDokumen8 halamanProblemas Eventos DiscretosDavid Andres AcostaBelum ada peringkat
- S07 - 02 EjerciciosDokumen7 halamanS07 - 02 EjerciciosArgenisBelum ada peringkat
- Hernan Vasquez de La Torre Examen FinalDokumen14 halamanHernan Vasquez de La Torre Examen FinalDarwin Yonel Mamani SalcedoBelum ada peringkat
- GrafDokumen10 halamanGrafLuis Eduardo RamírezBelum ada peringkat
- Guia 11 - Problemas Programacion PLCDokumen4 halamanGuia 11 - Problemas Programacion PLCodiseo_28Belum ada peringkat
- cee2724d-0ae9-4881-8fd5-7aa50a536698 (1)Dokumen3 halamancee2724d-0ae9-4881-8fd5-7aa50a536698 (1)Jhon Michael A. Salluca Vasquez0% (1)
- Práctica CalificadaDokumen11 halamanPráctica CalificadaElizabeth Inoñan100% (1)
- Ejercicios TrimestreDokumen17 halamanEjercicios Trimestreeroxdj0% (1)
- Laboratorio Calificado 2Dokumen4 halamanLaboratorio Calificado 2Elmer RchBelum ada peringkat
- Trabajo Practico Unidad 3Dokumen2 halamanTrabajo Practico Unidad 3matrix1xBelum ada peringkat
- Formas de Transferencia de EnergíaDokumen2 halamanFormas de Transferencia de EnergíaWilliams Tuarez MoreiraBelum ada peringkat
- 10 Concusiones y 10 Recomendaciones de La Puesta de Malla A Tierra y Puesta A Tierra de LTDokumen5 halaman10 Concusiones y 10 Recomendaciones de La Puesta de Malla A Tierra y Puesta A Tierra de LTCarlos SanchezBelum ada peringkat
- CalcxDokumen2 halamanCalcxNancy santiagoBelum ada peringkat
- Actividades Propuestas Pag 70 1 Sabes Cual Es La Densidad Del Agua PDFDokumen39 halamanActividades Propuestas Pag 70 1 Sabes Cual Es La Densidad Del Agua PDFSergio Alex. Quispe PircaBelum ada peringkat
- Dinamica de EstructurasDokumen17 halamanDinamica de EstructurasDarwin Tenorio67% (3)
- Nivel Basico Al ImpulsoDokumen23 halamanNivel Basico Al ImpulsoFannyCástilloM100% (1)
- Prueba de Descarga de Baterías - Enriquez LlaureDokumen2 halamanPrueba de Descarga de Baterías - Enriquez LlaureAlexander Enriquez llaureBelum ada peringkat
- Guia 02 - Ley de OhmDokumen3 halamanGuia 02 - Ley de OhmCielo FloridaBelum ada peringkat
- EJERCICIOSMDokumen5 halamanEJERCICIOSMMarcos CaamalBelum ada peringkat
- Conductividad de SolucionesDokumen5 halamanConductividad de SolucionesJose CortezBelum ada peringkat
- Anexo Compactacion de SuelosDokumen1 halamanAnexo Compactacion de SuelosHenry MouBelum ada peringkat
- La Oleada Ovni de Belgica 1989-1992Dokumen26 halamanLa Oleada Ovni de Belgica 1989-1992AntonioGamezBelum ada peringkat
- Ciencia - Falible - y - Revisable - (Autoguardado) 2Dokumen29 halamanCiencia - Falible - y - Revisable - (Autoguardado) 2JOSE LANGARICABelum ada peringkat
- Ih 466e 530e Fault Codes EsDokumen14 halamanIh 466e 530e Fault Codes EsFausto67% (3)
- Campo VectorialDokumen8 halamanCampo Vectorialsuperdany56Belum ada peringkat
- Seminario 3 de Int. Fis. Moderna 2021-1Dokumen2 halamanSeminario 3 de Int. Fis. Moderna 2021-1dino saurioBelum ada peringkat
- Lab 3 MecanismosDokumen20 halamanLab 3 MecanismosAnderson Raferti Loja LopezBelum ada peringkat
- Cap 4 Lineas de InfluenciaDokumen39 halamanCap 4 Lineas de InfluenciaTomás Amateco ReyesBelum ada peringkat
- 5 Fisiologia de La Audición PDFDokumen43 halaman5 Fisiologia de La Audición PDFKarina Dzib SuasteBelum ada peringkat
- Informe de TuberiasDokumen13 halamanInforme de TuberiasEder BustamanteBelum ada peringkat
- Calibracion de Mochila Aspersora (Metodo de Boquilla)Dokumen2 halamanCalibracion de Mochila Aspersora (Metodo de Boquilla)Luis RamosBelum ada peringkat
- Secretos Del Billar A Tres BandasDokumen41 halamanSecretos Del Billar A Tres Bandasmarlon100% (3)
- Factor de Relleno CajasDokumen15 halamanFactor de Relleno CajasSamed Maraza JaliriBelum ada peringkat
- Ecuación de NernstDokumen3 halamanEcuación de NernstAndersson Monago MoralesBelum ada peringkat
- 3ra UnidadDokumen28 halaman3ra UnidadLucio SifuentesBelum ada peringkat
- Accesorios de VoladuraDokumen29 halamanAccesorios de VoladuraJarenHeeBelum ada peringkat
- 2.5 Ecuaciones de Rectas y PlanosDokumen4 halaman2.5 Ecuaciones de Rectas y Planosgabito_181Belum ada peringkat
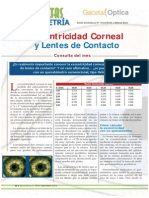
- 1 Excentricidad CornealDokumen2 halaman1 Excentricidad Cornealloris1978s100% (7)
- Union de Polimeros y CeramicosDokumen23 halamanUnion de Polimeros y CeramicosPepeLuchoBelum ada peringkat
- Soldadura de Filete PDFDokumen46 halamanSoldadura de Filete PDFEdgar Hernando Lopez Ochoa50% (8)