Anda mungkin juga menyukai
- Installation Licensing FAQDokumen15 halamanInstallation Licensing FAQVarun NagpalBelum ada peringkat
- Programming Techniques For SupercomputersDokumen20 halamanProgramming Techniques For SupercomputersVarun NagpalBelum ada peringkat
- Libero 11 7 Release NotesDokumen14 halamanLibero 11 7 Release NotesVarun NagpalBelum ada peringkat
- Cheat SheetDokumen2 halamanCheat SheetVarun NagpalBelum ada peringkat
- Probability - Notes2Dokumen5 halamanProbability - Notes2Varun NagpalBelum ada peringkat
- Primary Account Holder Joint Account Holder 1 Joint Account Holder 2Dokumen1 halamanPrimary Account Holder Joint Account Holder 1 Joint Account Holder 2Varun NagpalBelum ada peringkat
- SystemC TLMDokumen33 halamanSystemC TLMVarun NagpalBelum ada peringkat
- Introduction To High Performance Scientific ComputingDokumen510 halamanIntroduction To High Performance Scientific ComputingVarun NagpalBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Niranjan Regional Telecom Training Center MysoreDokumen71 halamanNiranjan Regional Telecom Training Center Mysorenobita3Belum ada peringkat
- DS-K1T804AMF Fingerprint Access Control TerminalDokumen3 halamanDS-K1T804AMF Fingerprint Access Control TerminalLuis RomeroBelum ada peringkat
- Commscope ERA CAP MDokumen3 halamanCommscope ERA CAP MClaudio CalabreseBelum ada peringkat
- COBHAM SAILOR 800 VSAT Product SheetDokumen2 halamanCOBHAM SAILOR 800 VSAT Product SheetMike millyBelum ada peringkat
- Pioneer DEH-11E Owners ManualDokumen49 halamanPioneer DEH-11E Owners ManualbackeastirishBelum ada peringkat
- It100-1 2Dokumen6 halamanIt100-1 2Kanton FernandezBelum ada peringkat
- Index: A. About KielDokumen73 halamanIndex: A. About KieldileeppatraBelum ada peringkat
- Experiment 6 ADCDokumen4 halamanExperiment 6 ADCABHISHEK SHARMABelum ada peringkat
- United States Patent: CA (US) Shouri Chatterjee, New 2733272 g1 2588 (1) Beige 341/59Dokumen14 halamanUnited States Patent: CA (US) Shouri Chatterjee, New 2733272 g1 2588 (1) Beige 341/59arupBelum ada peringkat
- Datasheet RPIV R4 8Dokumen8 halamanDatasheet RPIV R4 8Aldenir Jose BatistaBelum ada peringkat
- Error Codes - ResolutionsDokumen1 halamanError Codes - ResolutionsAyush KumarBelum ada peringkat
- M-8PGH-M65-16T212-TD (MRV 2600M)Dokumen4 halamanM-8PGH-M65-16T212-TD (MRV 2600M)jaager1985Belum ada peringkat
- Nombre Marca Modelo Serie Placa: Teknikit Consolette Feed Back Tk286 286/39/20 56498Dokumen1 halamanNombre Marca Modelo Serie Placa: Teknikit Consolette Feed Back Tk286 286/39/20 56498franky rugeBelum ada peringkat
- En User Guide Optoma ML750STDokumen57 halamanEn User Guide Optoma ML750STsgraureBelum ada peringkat
- Catalog UFSBIDokumen3 halamanCatalog UFSBINilangshu DasBelum ada peringkat
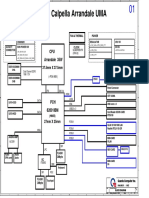
- Fujitsu Ah530 SchimaticDokumen38 halamanFujitsu Ah530 SchimaticabdullahBelum ada peringkat
- Compressive Sensing Based Medical Image Compression and Encryption Using Proposed 1-D Chaotic MapDokumen6 halamanCompressive Sensing Based Medical Image Compression and Encryption Using Proposed 1-D Chaotic MapGagaBelum ada peringkat
- Technical Specification Ad629Dokumen7 halamanTechnical Specification Ad629Ahmed AlkabodyBelum ada peringkat
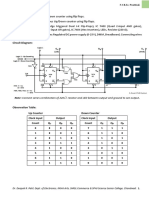
- Ic 7432 (Quad 2-Input or Gates), Ic 7404 (Hex Inverters), Leds, Resister (220 ) - EtcDokumen2 halamanIc 7432 (Quad 2-Input or Gates), Ic 7404 (Hex Inverters), Leds, Resister (220 ) - EtcIshtiaque Ahmed TanimBelum ada peringkat
- Data Sheet: For Extra SecurityDokumen2 halamanData Sheet: For Extra Securitymobitel_smdBelum ada peringkat
- CUUT070X06F 0: FeaturesDokumen5 halamanCUUT070X06F 0: Features'Theodora Georgiana100% (1)
- CCNA Interview Questions & Answers - Network KingsDokumen22 halamanCCNA Interview Questions & Answers - Network KingsRaghunandan SinghBelum ada peringkat
- Eutelsat Programi PDFDokumen113 halamanEutelsat Programi PDFQPI2Belum ada peringkat
- 2K12M1 - 017 Indoor Outdoor 2.4 GHZ Amplifiers PDFDokumen1 halaman2K12M1 - 017 Indoor Outdoor 2.4 GHZ Amplifiers PDFHenBelum ada peringkat
- Ztewelink Me3630 Datasheet v1.4Dokumen2 halamanZtewelink Me3630 Datasheet v1.4e.zuluagaBelum ada peringkat
- TL-SG1016 (Un) 13.0 & TL-SG1024 (Un) 14.0Dokumen3 halamanTL-SG1016 (Un) 13.0 & TL-SG1024 (Un) 14.0luis de leonBelum ada peringkat
- Introduction To Computers Prepared By: Rhonnel S. PaculananDokumen58 halamanIntroduction To Computers Prepared By: Rhonnel S. PaculananMirellaBelum ada peringkat
- 0.8 IH (E) ) S 10 o 0.27t: 1 AE 0.8 V1+ A (0.2)Dokumen19 halaman0.8 IH (E) ) S 10 o 0.27t: 1 AE 0.8 V1+ A (0.2)Mounika GorikadiBelum ada peringkat
- The Next Level of HD - H.265 2/4/5 Megapixel CamerasDokumen6 halamanThe Next Level of HD - H.265 2/4/5 Megapixel CamerasSurena RafiBelum ada peringkat
- Assignment#2 Ict 5403Dokumen14 halamanAssignment#2 Ict 5403um ul baneenBelum ada peringkat