Anda mungkin juga menyukai
- A Modified Partial Product Generator For Redundant Binary MultiplierDokumen8 halamanA Modified Partial Product Generator For Redundant Binary MultiplierSijo MathewBelum ada peringkat
- 8-BIT KOGGE STONE ADDER PROJECTDokumen8 halaman8-BIT KOGGE STONE ADDER PROJECTbigfatdashBelum ada peringkat
- Objective. Block Diagram. Design Aspects of Noc.: Routing Algorithms. Flow Control. Error Control SchemeDokumen38 halamanObjective. Block Diagram. Design Aspects of Noc.: Routing Algorithms. Flow Control. Error Control SchemeSijo Mathew100% (1)
- Ijarcet Vol 3 Issue 4 1527 1531Dokumen5 halamanIjarcet Vol 3 Issue 4 1527 1531Sijo MathewBelum ada peringkat
- Dynamically Reconfigurable Constant Multiplication of FpgasDokumen11 halamanDynamically Reconfigurable Constant Multiplication of FpgasSijo MathewBelum ada peringkat
- Inverter With Tanner Tools PDFDokumen76 halamanInverter With Tanner Tools PDFSijo MathewBelum ada peringkat
- Full Text 01Dokumen60 halamanFull Text 01Sijo Mathew100% (1)
- Model For Design Ing Digital Pid ControllersDokumen24 halamanModel For Design Ing Digital Pid ControllersSijo MathewBelum ada peringkat
- A Noval Approach of FFTDokumen3 halamanA Noval Approach of FFTSijo MathewBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Product Portfolio ManagementDokumen10 halamanProduct Portfolio ManagementSandeep Singh RajawatBelum ada peringkat
- Gillette and The Men's Wet Shaving Market: Group 8 Section BDokumen12 halamanGillette and The Men's Wet Shaving Market: Group 8 Section BAmit Hemant JainBelum ada peringkat
- Needle System Guide For Old Industrial Singer Sewing MachinesDokumen4 halamanNeedle System Guide For Old Industrial Singer Sewing MachinesWilberth FrancoBelum ada peringkat
- MGS3750 28FDokumen4 halamanMGS3750 28FAndi Z Pasuloi PatongaiBelum ada peringkat
- GRC Fiori End User Guide Final - V2Dokumen75 halamanGRC Fiori End User Guide Final - V2Subhash BharmappaBelum ada peringkat
- Turkle Sherry What Does Simulation Want PDFDokumen11 halamanTurkle Sherry What Does Simulation Want PDFmonterojuBelum ada peringkat
- 176Dokumen3 halaman176Karthik AmigoBelum ada peringkat
- Prepositions-Of-place Worksheet Azucena SalasDokumen3 halamanPrepositions-Of-place Worksheet Azucena SalasAndreia SimõesBelum ada peringkat
- PJ1117CM-2 5VDokumen6 halamanPJ1117CM-2 5VАлексей ГомоновBelum ada peringkat
- Documentation of Xabe - FFmpegDokumen11 halamanDocumentation of Xabe - FFmpegTomasz ŻmudaBelum ada peringkat
- Pagination script tutorial for PHP MySQL programmersDokumen4 halamanPagination script tutorial for PHP MySQL programmersThomas ChinyamaBelum ada peringkat
- A1.2.3 Method Statement 4a Redacted Version2Dokumen98 halamanA1.2.3 Method Statement 4a Redacted Version2ChanelBelum ada peringkat
- CV Summary for IT Position Seeking Recent GraduateDokumen5 halamanCV Summary for IT Position Seeking Recent Graduateeang barangBelum ada peringkat
- PET ImagingDokumen54 halamanPET ImagingNana AkwaboahBelum ada peringkat
- MCQ in Services MarketingDokumen83 halamanMCQ in Services Marketingbatuerem0% (1)
- August 2017Dokumen72 halamanAugust 2017Treatment Plant Operator MagazineBelum ada peringkat
- HEN SPF Roof Manual Spray Polyurethane FoamDokumen77 halamanHEN SPF Roof Manual Spray Polyurethane FoamDavaakhuu ErdeneeBelum ada peringkat
- 4PL Supply Chain Transformation SolutionsDokumen2 halaman4PL Supply Chain Transformation SolutionsGourav HegdeBelum ada peringkat
- Astral Column Pipe PricelistDokumen4 halamanAstral Column Pipe PricelistVaishamBelum ada peringkat
- TNB AR 2022 Corporate StructureDokumen2 halamanTNB AR 2022 Corporate StructureZamzuri P AminBelum ada peringkat
- Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions ManualDokumen27 halamanDigital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions Manualdacdonaldnxv1zq100% (27)
- RDSO - Specification No.M&C NDT 125 2004 Rev IDokumen6 halamanRDSO - Specification No.M&C NDT 125 2004 Rev INiking ThomsanBelum ada peringkat
- DS450 Shop Manual (Prelim)Dokumen94 halamanDS450 Shop Manual (Prelim)GuruRacerBelum ada peringkat
- Tda 1526Dokumen15 halamanTda 1526Adilcio Melo0% (1)
- Grade 6 Science PuzzleDokumen4 halamanGrade 6 Science Puzzlemargie riveraBelum ada peringkat
- Seb ProjectDokumen32 halamanSeb ProjectperthlingBelum ada peringkat
- Surging & Blow Out of Loop Seals in A CFBC BoilerDokumen9 halamanSurging & Blow Out of Loop Seals in A CFBC Boilermohamed faragBelum ada peringkat
- Mathcad - Ampacity CalculationDokumen76 halamanMathcad - Ampacity CalculationAlex Ribeiro100% (4)
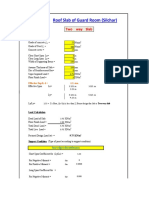
- Roof Slab of Guard RoomDokumen3 halamanRoof Slab of Guard RoomAditya KumarBelum ada peringkat
- VHF Low Loss Band-Pass Helical Filter For 145 MHZ - English NewDokumen33 halamanVHF Low Loss Band-Pass Helical Filter For 145 MHZ - English NewSharbel AounBelum ada peringkat