Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Bioresources.: Kraft, BCTMP, and TMP Dewatering Behaviour Along The Axis of A Screw PressDokumen16 halamanBioresources.: Kraft, BCTMP, and TMP Dewatering Behaviour Along The Axis of A Screw Pressjanaaidaas1996Belum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- 13-12 BIBUS Ez-Wheel Catalogue - ENDokumen20 halaman13-12 BIBUS Ez-Wheel Catalogue - ENjanaaidaas1996Belum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- 25 Things Managers Should Know About FEA - Digital EngineeringDokumen3 halaman25 Things Managers Should Know About FEA - Digital Engineeringjanaaidaas1996Belum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- An Entrepreneur Rajesh Mandlik LinkedInDokumen29 halamanAn Entrepreneur Rajesh Mandlik LinkedInjanaaidaas1996Belum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Van CFD: Boundery ConditionsDokumen4 halamanVan CFD: Boundery Conditionsjanaaidaas1996Belum ada peringkat
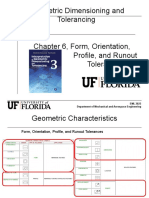
- GD&T BasicsDokumen33 halamanGD&T Basicsjanaaidaas1996Belum ada peringkat
- Dimensional Tolerance ChartDokumen1 halamanDimensional Tolerance Chartpushkar_k123Belum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Acquisition of Skill: How Does The Affect Performance?Dokumen22 halamanAcquisition of Skill: How Does The Affect Performance?janaaidaas1996Belum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Arena Ebook OutsourcingDokumen44 halamanArena Ebook Outsourcingjanaaidaas1996Belum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Mvax 11: Tripping and Interposing Supervision RelayDokumen4 halamanMvax 11: Tripping and Interposing Supervision RelayrithushivaBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Factors On Which Self Inductance of CoilDokumen7 halamanFactors On Which Self Inductance of CoilShikhar BajpaiBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- 800SADokumen2 halaman800SALucas TavaresBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Electrical Design Construction of Skate ParkDokumen5 halamanElectrical Design Construction of Skate ParkJorge Dela PeñaBelum ada peringkat
- 2 N 2222 ADokumen4 halaman2 N 2222 AepalpaBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Gen600 1.3 - Densei LambdaDokumen7 halamanGen600 1.3 - Densei LambdaRichard bangcayaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- (Eugenio Culurciello) Silicon-On-Sapphire CircuitsDokumen413 halaman(Eugenio Culurciello) Silicon-On-Sapphire Circuitsnguyen xuan vietBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Dielectric Breakdown Voltage TestingDokumen2 halamanDielectric Breakdown Voltage TestingAxel Mahya Avichena100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- 216B2, 226B2, 232B2, 236B2, 242B2, Electrical System 247B2 and 257B2 Multi-Terrain Loader and 252B2 Skid Steer LoaderDokumen4 halaman216B2, 226B2, 232B2, 236B2, 242B2, Electrical System 247B2 and 257B2 Multi-Terrain Loader and 252B2 Skid Steer LoaderAirton SenaBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- A Review On Noise Reduction of Brushed D.C. MotorDokumen3 halamanA Review On Noise Reduction of Brushed D.C. MotorPierre-Olivier MouthuyBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- PTW-06 Electrical Work PermitDokumen3 halamanPTW-06 Electrical Work PermitjayBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Commonly Used Colour Codes For British Car Wiring: Colour Main/Tracer UseDokumen3 halamanCommonly Used Colour Codes For British Car Wiring: Colour Main/Tracer UseazuertohbshhhBelum ada peringkat
- Battery Chargers For The American MarketDokumen8 halamanBattery Chargers For The American MarketFaizal Jamal100% (1)
- Enveoli1706006 V1Dokumen4 halamanEnveoli1706006 V1Phạm Văn Chí CôngBelum ada peringkat
- Site Planning Data 93E 15-20kvaDokumen8 halamanSite Planning Data 93E 15-20kvaTty SmithBelum ada peringkat
- Kongunadu College of Engineering and Technology, ThourpattiDokumen1 halamanKongunadu College of Engineering and Technology, ThourpattishankarBelum ada peringkat
- Cable Cleaners Cleaning Wipes SpecificationDokumen2 halamanCable Cleaners Cleaning Wipes Specificationdavid.darmaji011Belum ada peringkat
- Wiring MicoDokumen83 halamanWiring MicoSopyan PermanaBelum ada peringkat
- Experimenter: The Impoverished RadioDokumen52 halamanExperimenter: The Impoverished Radiobenra1100% (1)
- Bonitron Portable Capacitor FormerDokumen2 halamanBonitron Portable Capacitor FormerfghjfghjBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Breakglass MEC RCP22GDPDokumen1 halamanBreakglass MEC RCP22GDPashrookpBelum ada peringkat
- ITC222 Troubleshooting GuideDokumen52 halamanITC222 Troubleshooting Guidechuck3565Belum ada peringkat
- AutoMeter Sport Comp InstallationDokumen2 halamanAutoMeter Sport Comp Installationxeron7126Belum ada peringkat
- MX Ind 071394 vt2 132 SsDokumen2 halamanMX Ind 071394 vt2 132 SseveraroniekBelum ada peringkat
- Chapter 2Dokumen54 halamanChapter 2Ankit SinghBelum ada peringkat
- ZS Chart - 090315 - Final PDFDokumen2 halamanZS Chart - 090315 - Final PDFRajendra Prasad ShuklaBelum ada peringkat
- Crystal Units: AT-41 / AT-41CD2Dokumen1 halamanCrystal Units: AT-41 / AT-41CD2mohamedBelum ada peringkat
- Irf1405 DatasheetDokumen9 halamanIrf1405 DatasheetE Alejandro G. BenavidesBelum ada peringkat
- Nec 250 Part X GroundingDokumen23 halamanNec 250 Part X Groundingvladimir rosas ayalaBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)