Anda mungkin juga menyukai
- The Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingDari EverandThe Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingBelum ada peringkat
- How to Build a Global Model Earthship Operation I: Tire WorkDari EverandHow to Build a Global Model Earthship Operation I: Tire WorkBelum ada peringkat
- Final SurveyquestionnaireDokumen1 halamanFinal SurveyquestionnaireLen Alair67% (3)
- Sid Meier's Railroad Tycoon User Manual & Technical SupplementDokumen79 halamanSid Meier's Railroad Tycoon User Manual & Technical Supplementjacobolsen50% (4)
- FIRST Robotics - FRC Mechanical PresentationDokumen57 halamanFIRST Robotics - FRC Mechanical PresentationDavid B MittelmanBelum ada peringkat
- Jeep, Dana & Chrysler Differentials: How to Rebuild the 8-1/4, 8-3/4, Dana 44 & 60 & AMC 20Dari EverandJeep, Dana & Chrysler Differentials: How to Rebuild the 8-1/4, 8-3/4, Dana 44 & 60 & AMC 20Belum ada peringkat
- Highway Bridge LoadsDokumen36 halamanHighway Bridge LoadsHarold Jackson Mtyana100% (3)
- Chassis DesignDokumen33 halamanChassis Designjoph doeBelum ada peringkat
- Robotics and Automation - Unit-2 (Part 2)Dokumen33 halamanRobotics and Automation - Unit-2 (Part 2)jaiganeshBelum ada peringkat
- Gears & Drives: MEC1010 Design and Manufacturing 1 Dr. Simon SmithDokumen50 halamanGears & Drives: MEC1010 Design and Manufacturing 1 Dr. Simon SmithDavid MbikayiBelum ada peringkat
- OutlinepdfDokumen3 halamanOutlinepdfapi-342896750Belum ada peringkat
- FRC Drive Trains: Strategy & SuccessDokumen45 halamanFRC Drive Trains: Strategy & SuccessLyleBelum ada peringkat
- Differentials and Drive Axles Study NotesDokumen9 halamanDifferentials and Drive Axles Study Notespavanrane100% (1)
- SuspensionDokumen47 halamanSuspensiongsaratkumar50% (2)
- 2016 - 1404 - Types of Gears - BearingsDokumen78 halaman2016 - 1404 - Types of Gears - Bearingspranay kaduBelum ada peringkat
- Dozers: What Are These ? & What They Does ?Dokumen118 halamanDozers: What Are These ? & What They Does ?harirambo100% (1)
- Wheel Control Theory for RobotsDokumen7 halamanWheel Control Theory for RobotsNgurah BimantaraBelum ada peringkat
- Fabricating Reverse Gear for Two WheelersDokumen26 halamanFabricating Reverse Gear for Two WheelersSai RamBelum ada peringkat
- Unit 1 - Gear Manufacturing ProcessDokumen54 halamanUnit 1 - Gear Manufacturing ProcessAkash DivateBelum ada peringkat
- Four Wheel Steering System DesignDokumen27 halamanFour Wheel Steering System DesignsolovenatorBelum ada peringkat
- Gears and TransmissionsDokumen27 halamanGears and TransmissionsAshish ChaturvediBelum ada peringkat
- 1GEARDokumen18 halaman1GEARsatheeshkumarBelum ada peringkat
- Suspension Design Case StudyDokumen44 halamanSuspension Design Case StudyShounak BhateBelum ada peringkat
- Rough Terrain Rover by Rocker Bogie MechanismDokumen18 halamanRough Terrain Rover by Rocker Bogie MechanismKamal RajuBelum ada peringkat
- Gear Types, Materials, and Design FundamentalsDokumen33 halamanGear Types, Materials, and Design FundamentalsSenthil KumarBelum ada peringkat
- BrakesDokumen27 halamanBrakesNiño Jhim AndrewBelum ada peringkat
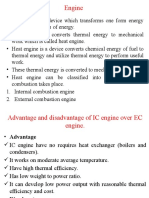
- How Engines Work: A Guide to Internal Combustion Engine Components and SystemsDokumen20 halamanHow Engines Work: A Guide to Internal Combustion Engine Components and Systemsmebratu AssefaBelum ada peringkat
- CNC Machine Design FeaturesDokumen63 halamanCNC Machine Design FeaturesmahavircBelum ada peringkat
- Four Types of MotionDokumen30 halamanFour Types of MotionRonyBelum ada peringkat
- BearingsDokumen48 halamanBearingsgaurav tiwariBelum ada peringkat
- Nutrons: DC Motors & GearingDokumen9 halamanNutrons: DC Motors & GearingjhpandiBelum ada peringkat
- Steering SystemDokumen29 halamanSteering SystemNauman KhanBelum ada peringkat
- Introduction To GearsDokumen28 halamanIntroduction To Gearssandeep_gaikwad2100% (4)
- Steering PDFDokumen79 halamanSteering PDFbroBelum ada peringkat
- Steering For Dummies: Tanmay Shankar 2 Year, MechDokumen14 halamanSteering For Dummies: Tanmay Shankar 2 Year, MechHarshal PaunikarBelum ada peringkat
- Element of CNC MachinesDokumen60 halamanElement of CNC MachinesGururaj Gadad100% (3)
- AUTOMOBILE ENGINEERING UNIT 3 - Braking Systems OverviewDokumen126 halamanAUTOMOBILE ENGINEERING UNIT 3 - Braking Systems OverviewShubham GuptaBelum ada peringkat
- Mechanical Power TransmissionsDokumen22 halamanMechanical Power TransmissionsrodrigoperezsimoneBelum ada peringkat
- Transmission 1 Transmission 1: Group 3Dokumen30 halamanTransmission 1 Transmission 1: Group 3Edwin Anugrah EffendyBelum ada peringkat
- Introductiontoautomotivesystem Converted 200702172619Dokumen26 halamanIntroductiontoautomotivesystem Converted 200702172619Ian PhilipBelum ada peringkat
- Gear Basic Technology 8Dokumen13 halamanGear Basic Technology 8Valentine NwankwoBelum ada peringkat
- Design of Belts & PulleysDokumen40 halamanDesign of Belts & PulleysManoj ChepeBelum ada peringkat
- Gear CuttingDokumen56 halamanGear Cuttingiyerrahul2679350% (2)
- Catalogo Rines AutomovilDokumen92 halamanCatalogo Rines AutomovilYimmy MorenoBelum ada peringkat
- Various Types of Steering System, Steering GeometryDokumen32 halamanVarious Types of Steering System, Steering GeometrySumit Choudhary100% (1)
- Tyre and Bump SteerDokumen25 halamanTyre and Bump SteerGinu ThomasBelum ada peringkat
- GRSDokumen54 halamanGRSMohamed Bakheet100% (1)
- Steering SystemDokumen57 halamanSteering Systemsharad100% (2)
- Chapter 39 Tires, Wheels and Hubs Maintenance, Diagnosis and ServiceDokumen40 halamanChapter 39 Tires, Wheels and Hubs Maintenance, Diagnosis and ServiceROSAN YUMANGBelum ada peringkat
- What Is Gear Box.... ?Dokumen24 halamanWhat Is Gear Box.... ?DivyBelum ada peringkat
- Mod5 1Dokumen71 halamanMod5 1jojo pantherBelum ada peringkat
- 2.2.2.A MechanismsDokumen30 halaman2.2.2.A MechanismscslourencoBelum ada peringkat
- Why Wheels Don't Point in The Same Direction?Dokumen14 halamanWhy Wheels Don't Point in The Same Direction?BrijBelum ada peringkat
- ME0403 Ch2 Gear MeasurementDokumen42 halamanME0403 Ch2 Gear MeasurementMANOJ M100% (1)
- UnitIII Brakes and WheelsDokumen29 halamanUnitIII Brakes and WheelsDheer SinghBelum ada peringkat
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsDari EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsPenilaian: 5 dari 5 bintang5/5 (1)
- The Slot Car Handbook: The definitive guide to setting-up and running Scalextric sytle 1/32 scale ready-to-race slot carsDari EverandThe Slot Car Handbook: The definitive guide to setting-up and running Scalextric sytle 1/32 scale ready-to-race slot carsPenilaian: 3 dari 5 bintang3/5 (1)
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.Dari EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.Belum ada peringkat
- Full Scale Derailment Testes On Freight WagonsDokumen19 halamanFull Scale Derailment Testes On Freight WagonsFelipe Campos100% (1)
- HD325-7R Shop ManualDokumen1.315 halamanHD325-7R Shop ManualSON100% (1)
- Phun Xang Dien Tu p1 8097Dokumen351 halamanPhun Xang Dien Tu p1 8097Đức Hòang100% (1)
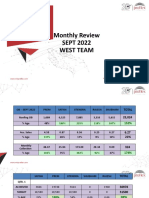
- Monthly Review Meeting - Oct 22Dokumen16 halamanMonthly Review Meeting - Oct 22raj rathodBelum ada peringkat
- Main Street Economic Recovery PlanDokumen344 halamanMain Street Economic Recovery Planjay.yarow100% (2)
- PDFDokumen207 halamanPDFManoj Kumar MBelum ada peringkat
- Soal Ulangan B Ing Kelas 5Dokumen5 halamanSoal Ulangan B Ing Kelas 5arum60% (5)
- 16210Dokumen1 halaman16210sitam_nitj4202Belum ada peringkat
- ProductsDokumen9 halamanProductsRampage BooyssBelum ada peringkat
- Container TerminalDokumen8 halamanContainer TerminalAlex Goussiatiner100% (3)
- RTA Public Square TrafficStudy ResultsMemo 20170206 SUBMITTEDDokumen2 halamanRTA Public Square TrafficStudy ResultsMemo 20170206 SUBMITTEDWKYC.comBelum ada peringkat
- Athens 2806 Web PDFDokumen43 halamanAthens 2806 Web PDFAnaBelum ada peringkat
- General CodeDokumen507 halamanGeneral Codeoptimist_24Belum ada peringkat
- Railways UPSCDokumen10 halamanRailways UPSCalokBelum ada peringkat
- RCA Comment On V6 & V7 of The Draft Reston Comprehensive Plan, September 30, 2013Dokumen7 halamanRCA Comment On V6 & V7 of The Draft Reston Comprehensive Plan, September 30, 2013Terry MaynardBelum ada peringkat
- Continuously Variable TransmissionDokumen52 halamanContinuously Variable TransmissionPrints BindingsBelum ada peringkat
- 14 - Transmission TowerDokumen153 halaman14 - Transmission Towerhari1008108100% (2)
- GEIGER® Claw Screen - ENDokumen3 halamanGEIGER® Claw Screen - ENlutfi_ismailBelum ada peringkat
- Types Ground Based Airport Amphibious AirportDokumen19 halamanTypes Ground Based Airport Amphibious AirportSuhail AhmedBelum ada peringkat
- IRCTC Roles & ResponsibitlitiesDokumen3 halamanIRCTC Roles & ResponsibitlitiesNil Mukherjee100% (1)
- Backpacking Thailand Travel Guide For 2019: Southeast AsiaDokumen24 halamanBackpacking Thailand Travel Guide For 2019: Southeast AsiaArris GaweBelum ada peringkat
- Pipeline buckling risks from axial loadsDokumen9 halamanPipeline buckling risks from axial loadsAdebanjo TomisinBelum ada peringkat
- Mehak Jain UPSC notes on Indian agricultureDokumen9 halamanMehak Jain UPSC notes on Indian agriculturedheeraj shindeBelum ada peringkat
- Art Pig Iron ObservationsDokumen10 halamanArt Pig Iron ObservationsLau ManriqueBelum ada peringkat
- Hybrid Locomotives OverviewDokumen8 halamanHybrid Locomotives OverviewAdji MeldotkomBelum ada peringkat
- Bounce Case Study TS 2019 PDFDokumen3 halamanBounce Case Study TS 2019 PDFSourabh MukherjeeBelum ada peringkat