Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Radio - Micro - Bit RuntimeDokumen16 halamanRadio - Micro - Bit RuntimeJohn WestBelum ada peringkat
- 505xt 1 en PDFDokumen242 halaman505xt 1 en PDFSyed Mohammad NaveedBelum ada peringkat
- Graded Worksheet D3Dokumen1 halamanGraded Worksheet D3Jacob DziubekBelum ada peringkat
- Reaction Paper On Abaca IssueDokumen2 halamanReaction Paper On Abaca IssueAeron Afunggol RuazolBelum ada peringkat
- Holliday - Native SpeakerismDokumen3 halamanHolliday - Native SpeakerismDánisaGarderesBelum ada peringkat
- Material SelectionDokumen58 halamanMaterial SelectionSivareddy InduriBelum ada peringkat
- Action Research: Repeated Reading To Improve Students' Reading FluencyDokumen4 halamanAction Research: Repeated Reading To Improve Students' Reading FluencyIylia NatasyaBelum ada peringkat
- Shortcut To English CollocationDokumen240 halamanShortcut To English Collocationtiago90% (10)
- L15 Conflict Management SDokumen18 halamanL15 Conflict Management SjnfzBelum ada peringkat
- INGOLD, Tim. Perceiving The EnviromentDokumen15 halamanINGOLD, Tim. Perceiving The EnviromentCassiana Oliveira da SilvaBelum ada peringkat
- MD Nastran R3 - Explicit Nonlinear SOL 700 User's Guide PDFDokumen602 halamanMD Nastran R3 - Explicit Nonlinear SOL 700 User's Guide PDFpezz07Belum ada peringkat
- Virtual Earth SurveyDokumen11 halamanVirtual Earth SurveyWenkatWenkatBelum ada peringkat
- Loads Dead Loads Imposed Loads Floor Roof Determining Load Per M and m2 WindDokumen58 halamanLoads Dead Loads Imposed Loads Floor Roof Determining Load Per M and m2 Windwaheedopple3998Belum ada peringkat
- PIT Error Overview - ParetoDokumen208 halamanPIT Error Overview - ParetoHariharan Yelomalei50% (2)
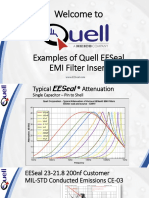
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDokumen15 halamanExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinBelum ada peringkat
- Mom MF-1Dokumen79 halamanMom MF-1AnbuBelum ada peringkat
- Fault Seal Analysis, UK Noerthern Sea, The Alwyn North Statgjord ExampleDokumen5 halamanFault Seal Analysis, UK Noerthern Sea, The Alwyn North Statgjord ExampleAiwarikiaarBelum ada peringkat
- Ethics and Voluntary Act For HardDokumen4 halamanEthics and Voluntary Act For HardSarah Del Mundo CagangBelum ada peringkat
- "Uncontrolled Desires": The Response To The Sexual Psychopath, 1920-1960Dokumen25 halaman"Uncontrolled Desires": The Response To The Sexual Psychopath, 1920-1960ukladsil7020Belum ada peringkat
- Low-Power and Area-Efficient Shift Register Using Pulsed Latches With CMOS TechnologyDokumen6 halamanLow-Power and Area-Efficient Shift Register Using Pulsed Latches With CMOS TechnologySesharatnam KoppulaBelum ada peringkat
- ISO Guide 35 Statistical Procedures For Reference MaterialsDokumen38 halamanISO Guide 35 Statistical Procedures For Reference MaterialsAlberto Núñez Cardezo50% (2)
- EstratehiyaDokumen2 halamanEstratehiyaMikaella AlvarezaBelum ada peringkat
- Morane 4 PFN FffsDokumen20 halamanMorane 4 PFN FffsFatmen FataBelum ada peringkat
- Atex Flow ChartDokumen1 halamanAtex Flow ChartMohammad KurdiaBelum ada peringkat
- Railway Fatalities in South West MumbaiDokumen12 halamanRailway Fatalities in South West MumbaiAwpan SabaleBelum ada peringkat
- Caillau, Guillon. S. Ephræm. Opera Omnia. 1832. Volume 7.Dokumen540 halamanCaillau, Guillon. S. Ephræm. Opera Omnia. 1832. Volume 7.Patrologia Latina, Graeca et OrientalisBelum ada peringkat
- Mock 1 Practice PaperDokumen27 halamanMock 1 Practice PaperSupriti SarkerBelum ada peringkat
- Kaizen MR - Final PDFDokumen65 halamanKaizen MR - Final PDFbhatiaharryjassiBelum ada peringkat
- Communication Skills For Pharmacists UkratkoDokumen2 halamanCommunication Skills For Pharmacists UkratkoГоран МарковиќBelum ada peringkat
- Geberit Case Study PDFDokumen2 halamanGeberit Case Study PDFsapiencecorpBelum ada peringkat