Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Program Design for Speed and Agility TrainingDokumen72 halamanProgram Design for Speed and Agility TrainingLaila SigitBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Pump Design WorksheetDokumen3 halamanPump Design Worksheetejzuppelli8036100% (8)
- Bollard Pull CalculationDokumen1 halamanBollard Pull CalculationMark Samsel Rohan100% (2)
- QUIRINO GENERAL HIGH SCHOOL HOME LEARNING PLANDokumen4 halamanQUIRINO GENERAL HIGH SCHOOL HOME LEARNING PLANPau AbuenaBelum ada peringkat
- Hydraulically Driven Deck MachineryDokumen2 halamanHydraulically Driven Deck MachineryMohamed FouadBelum ada peringkat
- Pump CalcDokumen8 halamanPump CalcMohamed FouadBelum ada peringkat
- Shipbuilding Quality Standard GuideDokumen59 halamanShipbuilding Quality Standard Guidenyaungzin100% (2)
- Dasar Teori FEMDokumen163 halamanDasar Teori FEMNurhidayat Dayat100% (3)
- Brochure Marine ServicesDokumen12 halamanBrochure Marine ServicesMohamed FouadBelum ada peringkat
- Science10 q2 Mod1of6 Electromagneticspectrum v2Dokumen19 halamanScience10 q2 Mod1of6 Electromagneticspectrum v2Renmarie LaborBelum ada peringkat
- Design of Pumping Machinery for Water Supply ProjectDokumen1 halamanDesign of Pumping Machinery for Water Supply ProjectSn SatyanarayanaBelum ada peringkat
- Chapter 1 Operation Manual of BoilerDokumen210 halamanChapter 1 Operation Manual of Boilerbagas chrisBelum ada peringkat
- Kind of ValvesDokumen2 halamanKind of ValvesMohamed FouadBelum ada peringkat
- 9-Valves Rating9Dokumen29 halaman9-Valves Rating9Mohamed FouadBelum ada peringkat
- Diaphragm Valves: Prof. DR: Nazih BayomiDokumen68 halamanDiaphragm Valves: Prof. DR: Nazih BayomiMohamed FouadBelum ada peringkat
- Amirikiann A.analysis and Design .1957.TRANSDokumen55 halamanAmirikiann A.analysis and Design .1957.TRANSMohamed FouadBelum ada peringkat
- Propeller Performance and Weight Predictions Appended To The Navy/NASADokumen40 halamanPropeller Performance and Weight Predictions Appended To The Navy/NASAMohamed FouadBelum ada peringkat
- Kind of ValvesDokumen2 halamanKind of ValvesMohamed FouadBelum ada peringkat
- Detail - MTU OnlineDokumen1 halamanDetail - MTU OnlineMohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge4 2Dokumen1 halaman40ft shallowWaterWorkBarge4 2Mohamed FouadBelum ada peringkat
- Cont RoundDokumen1 halamanCont RoundMohamed FouadBelum ada peringkat
- Pre-Feasibility Study: S H I P B R E A K I N GDokumen46 halamanPre-Feasibility Study: S H I P B R E A K I N GMohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge1Dokumen1 halaman40ft shallowWaterWorkBarge1Mohamed FouadBelum ada peringkat
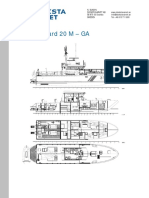
- 20m Ga Drawings1Dokumen1 halaman20m Ga Drawings1Mohamed FouadBelum ada peringkat
- Full Text 01Dokumen61 halamanFull Text 01Imam BaihaqiBelum ada peringkat
- 40ft shallowWaterWorkBarge3Dokumen1 halaman40ft shallowWaterWorkBarge3Mohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge5Dokumen1 halaman40ft shallowWaterWorkBarge5Mohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge2Dokumen1 halaman40ft shallowWaterWorkBarge2Mohamed FouadBelum ada peringkat
- ForanTribon Into 3D Naval Architect Jan12Dokumen2 halamanForanTribon Into 3D Naval Architect Jan12Mohamed FouadBelum ada peringkat
- V53 2 p95 p102 PDFDokumen8 halamanV53 2 p95 p102 PDFMohamed FouadBelum ada peringkat
- Modularization Analysis Presentation Revised PDFDokumen38 halamanModularization Analysis Presentation Revised PDFshiva1978in@gmail.comBelum ada peringkat
- Wang DDokumen4 halamanWang DMohamed FouadBelum ada peringkat
- 1211 1365 PDFDokumen14 halaman1211 1365 PDFMohamed FouadBelum ada peringkat
- Optimizacion Ship DesignDokumen13 halamanOptimizacion Ship Designlucas polo100% (1)
- 04 2 PDFDokumen11 halaman04 2 PDFMohamed FouadBelum ada peringkat
- Fluid DynamicsDokumen3 halamanFluid DynamicsKaanBelum ada peringkat
- General Chemistry Lecture 3Dokumen18 halamanGeneral Chemistry Lecture 3Niloy GhoshBelum ada peringkat
- Norma Prueba Acelerada de CorrosionDokumen3 halamanNorma Prueba Acelerada de CorrosionVictor FLBelum ada peringkat
- LEP 2.2.01 Interference of Light: Related Topics Set-Up and ProcedureDokumen3 halamanLEP 2.2.01 Interference of Light: Related Topics Set-Up and ProcedureMuhammad AhmadBelum ada peringkat
- FOOD CHEMISTRY: WATER'S ROLE IN FOODSDokumen31 halamanFOOD CHEMISTRY: WATER'S ROLE IN FOODSMwangi BonfaceBelum ada peringkat
- YLP V2 series 说明书Dokumen20 halamanYLP V2 series 说明书王怡鹏Belum ada peringkat
- JC2 H2 Physics Prelim Paper 3 SolutionsDokumen10 halamanJC2 H2 Physics Prelim Paper 3 SolutionsxiaokiaBelum ada peringkat
- Chapter 4.0 Sensor and Signal ConditioningDokumen49 halamanChapter 4.0 Sensor and Signal ConditioningDawit MengisteabBelum ada peringkat
- 2HFF4 2Dokumen12 halaman2HFF4 2AhmmedBelum ada peringkat
- Lighitng LebanonDokumen138 halamanLighitng Lebanonmohammad kassarBelum ada peringkat
- Seatworks in Thermochemistry: Decimal Places and Round-Off The Final Answer. Avoid Too Much Erasure. Use Black Pen OnlyDokumen3 halamanSeatworks in Thermochemistry: Decimal Places and Round-Off The Final Answer. Avoid Too Much Erasure. Use Black Pen OnlyPsycho The GreatestBelum ada peringkat
- Tutorial 2Dokumen3 halamanTutorial 2danielruthers2Belum ada peringkat
- Dielectric: A Polarised Dielectric MaterialDokumen12 halamanDielectric: A Polarised Dielectric Materialsimbua72Belum ada peringkat
- Design of A Mechanical Drive: Part TwoDokumen3 halamanDesign of A Mechanical Drive: Part TwoOrlando ValverdeBelum ada peringkat
- 079261-180501 MEGADYNE ACE Blade Fact Sheet v19Dokumen2 halaman079261-180501 MEGADYNE ACE Blade Fact Sheet v19zjuwindBelum ada peringkat
- CPS 240W 24V10A: Techn/Ca/. Oa'Ta Shee'TDokumen1 halamanCPS 240W 24V10A: Techn/Ca/. Oa'Ta Shee'Tsid aliBelum ada peringkat
- Proposal - Shortcut - LNKDokumen11 halamanProposal - Shortcut - LNKJohn kinder BasilioBelum ada peringkat
- Hydraulics & Fluid Mechanics 5Dokumen16 halamanHydraulics & Fluid Mechanics 5Manaal tariqBelum ada peringkat
- Calculus Based Physics 2: Question TextDokumen40 halamanCalculus Based Physics 2: Question Textmark buenaflorBelum ada peringkat
- Calculation of Separation Distance Between Adjacent Buildings: A Review On Codal ProvisionsDokumen12 halamanCalculation of Separation Distance Between Adjacent Buildings: A Review On Codal ProvisionsmanumeetBelum ada peringkat
- ASTM F1554 Anchor Bolt Specs & Mechanical PropertiesDokumen1 halamanASTM F1554 Anchor Bolt Specs & Mechanical PropertiesReyuni doankBelum ada peringkat
- VX - UFOs and Aliens Are Man Made.Dokumen422 halamanVX - UFOs and Aliens Are Man Made.niksaniksa780Belum ada peringkat
- .0106 Mm/s 0.075 Mm/s .106 Cm/s 0.750 Cm/s .106 Mm/s 0.750 Mm/s .0106 Mm/s 0.075 Cm/sDokumen2 halaman.0106 Mm/s 0.075 Mm/s .106 Cm/s 0.750 Cm/s .106 Mm/s 0.750 Mm/s .0106 Mm/s 0.075 Cm/sReech Aerol AlmendralBelum ada peringkat
- PreviewpdfDokumen30 halamanPreviewpdfankitBelum ada peringkat
- Design of Broadband Microstrip Patch Antennas For Wireless SystemDokumen15 halamanDesign of Broadband Microstrip Patch Antennas For Wireless SystemIJRASETPublicationsBelum ada peringkat