Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Pump Design WorksheetDokumen3 halamanPump Design Worksheetejzuppelli8036100% (8)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- 9-Valves Rating9Dokumen29 halaman9-Valves Rating9Mohamed FouadBelum ada peringkat
- Kind of ValvesDokumen2 halamanKind of ValvesMohamed FouadBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Kind of ValvesDokumen2 halamanKind of ValvesMohamed FouadBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Design of Pumping Machinery For Lifting Water From Source To Proposed/existing RCC Sump. Annexure-2Dokumen1 halamanDesign of Pumping Machinery For Lifting Water From Source To Proposed/existing RCC Sump. Annexure-2Sn SatyanarayanaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Diaphragm Valves: Prof. DR: Nazih BayomiDokumen68 halamanDiaphragm Valves: Prof. DR: Nazih BayomiMohamed FouadBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Pre-Feasibility Study: S H I P B R E A K I N GDokumen46 halamanPre-Feasibility Study: S H I P B R E A K I N GMohamed FouadBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Cont RoundDokumen1 halamanCont RoundMohamed FouadBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Pump CalcDokumen8 halamanPump CalcMohamed FouadBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Brochure Marine ServicesDokumen12 halamanBrochure Marine ServicesMohamed FouadBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Propeller Performance and Weight Predictions Appended To The Navy/NASADokumen40 halamanPropeller Performance and Weight Predictions Appended To The Navy/NASAMohamed FouadBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Modularization Analysis Presentation Revised PDFDokumen38 halamanModularization Analysis Presentation Revised PDFshiva1978in@gmail.comBelum ada peringkat
- Detail - MTU OnlineDokumen1 halamanDetail - MTU OnlineMohamed FouadBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Hydraulically Driven Deck MachineryDokumen2 halamanHydraulically Driven Deck MachineryMohamed FouadBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- 40ft shallowWaterWorkBarge1Dokumen1 halaman40ft shallowWaterWorkBarge1Mohamed FouadBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Bollard Pull CalculationDokumen1 halamanBollard Pull CalculationMark Samsel Rohan100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
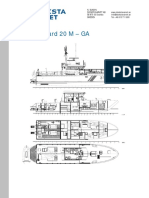
- 20m Ga Drawings1Dokumen1 halaman20m Ga Drawings1Mohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge3Dokumen1 halaman40ft shallowWaterWorkBarge3Mohamed FouadBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- 40ft shallowWaterWorkBarge5Dokumen1 halaman40ft shallowWaterWorkBarge5Mohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge4 2Dokumen1 halaman40ft shallowWaterWorkBarge4 2Mohamed FouadBelum ada peringkat
- Full Text 01Dokumen61 halamanFull Text 01Imam BaihaqiBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- IACS Shipbuilding and Repair Quality Standards No 47 Rev 5 Oct 2010Dokumen59 halamanIACS Shipbuilding and Repair Quality Standards No 47 Rev 5 Oct 2010nyaungzin100% (2)
- ForanTribon Into 3D Naval Architect Jan12Dokumen2 halamanForanTribon Into 3D Naval Architect Jan12Mohamed FouadBelum ada peringkat
- Amirikiann A.analysis and Design .1957.TRANSDokumen55 halamanAmirikiann A.analysis and Design .1957.TRANSMohamed FouadBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- 40ft shallowWaterWorkBarge2Dokumen1 halaman40ft shallowWaterWorkBarge2Mohamed FouadBelum ada peringkat
- Wang DDokumen4 halamanWang DMohamed FouadBelum ada peringkat
- V53 2 p95 p102 PDFDokumen8 halamanV53 2 p95 p102 PDFMohamed FouadBelum ada peringkat
- 04 2 PDFDokumen11 halaman04 2 PDFMohamed FouadBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Optimizacion Ship DesignDokumen13 halamanOptimizacion Ship Designlucas polo100% (1)
- 1211 1365 PDFDokumen14 halaman1211 1365 PDFMohamed FouadBelum ada peringkat
- Thermosyphon Oil CoolingDokumen22 halamanThermosyphon Oil CoolingRenato MendesBelum ada peringkat
- CADAM User Manual V1.4.3Dokumen125 halamanCADAM User Manual V1.4.3Vishal Rathod100% (8)
- Zaman of Chapter 2 - Fluid PressureDokumen41 halamanZaman of Chapter 2 - Fluid PressureFatin HazwaniBelum ada peringkat
- ST, ViscosityDokumen26 halamanST, ViscosityAyush SrivastavBelum ada peringkat
- Flare SystemDokumen29 halamanFlare Systemvikkoo7100% (4)
- Liquid Pump TerminologyDokumen1 halamanLiquid Pump TerminologyChevronelleBelum ada peringkat
- Sound Intensity Booklet A4 2021Dokumen24 halamanSound Intensity Booklet A4 2021eduardo paivaBelum ada peringkat
- International Journal of Heat and Mass TransferDokumen12 halamanInternational Journal of Heat and Mass TransferYomiraElisaSambonyBelum ada peringkat
- Iso 7278-2Dokumen28 halamanIso 7278-2Haytham DiaaBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- TM4112 - 10 Building The Dynamic Model - SCALDokumen91 halamanTM4112 - 10 Building The Dynamic Model - SCALRay YudaBelum ada peringkat
- Manual Instruction CPAM-EKA AIR C16 EKA KOOL V2Dokumen8 halamanManual Instruction CPAM-EKA AIR C16 EKA KOOL V2Tam DuongBelum ada peringkat
- VenAir ManguerasDokumen56 halamanVenAir ManguerasSadhala01Belum ada peringkat
- Fluid MechanicsDokumen34 halamanFluid Mechanicschile100% (1)
- Physics of FluidsDokumen41 halamanPhysics of FluidsSherwin PBelum ada peringkat
- SAMSON ANTI CAVITATION 3 TrimsDokumen8 halamanSAMSON ANTI CAVITATION 3 TrimsShaheen HydrosBelum ada peringkat
- Air DensityDokumen24 halamanAir DensityPraphulBelum ada peringkat
- HYDRAULICS - Module 1 Lesson 2Dokumen57 halamanHYDRAULICS - Module 1 Lesson 2Rey Angelo Carbilledo Jr.100% (2)
- Reciprocating Pump Catalog PDFDokumen109 halamanReciprocating Pump Catalog PDFDaniel Erasmo Avellaneda SanchezBelum ada peringkat
- Underground Water Tank DesignDokumen23 halamanUnderground Water Tank Designfawad_jawaid570072% (36)
- J. Chem. Thermodynamics: Rodolfo Quevedo-Nolasco, Luis A. Galicia-Luna, Octavio Elizalde-SolisDokumen15 halamanJ. Chem. Thermodynamics: Rodolfo Quevedo-Nolasco, Luis A. Galicia-Luna, Octavio Elizalde-SolisKally SalinasBelum ada peringkat
- 9 - Thermal PropertiesDokumen20 halaman9 - Thermal PropertiesEdgardo Leysa100% (1)
- Grade 10 ActivityDokumen52 halamanGrade 10 Activityapi-340407914100% (1)
- Bimbar InflatableDokumen36 halamanBimbar InflatableMelissa MorganBelum ada peringkat
- Pore-Liquid Sampling From The Vadose ZoneDokumen32 halamanPore-Liquid Sampling From The Vadose ZoneJose Luis Nava Hernandez100% (1)
- Se PDFDokumen840 halamanSe PDFtesfayregs gebretsadikBelum ada peringkat
- Test Methods To Predict Moisture Sensitivity of Hot-Mix AsphaltDokumen38 halamanTest Methods To Predict Moisture Sensitivity of Hot-Mix AsphaltshyabedBelum ada peringkat
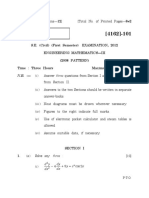
- CT II QP Sep'11Dokumen4 halamanCT II QP Sep'11Rajha RajeswaranBelum ada peringkat
- Garlock Blue Gard 3000 Data SheetDokumen1 halamanGarlock Blue Gard 3000 Data SheetMatheus TorresBelum ada peringkat
- 1417 Pipeline Surge Analysis Studies Atmos - PSIGDokumen21 halaman1417 Pipeline Surge Analysis Studies Atmos - PSIGsmdryz100% (4)
- Design of Storage Tanks For Internal PressureDokumen7 halamanDesign of Storage Tanks For Internal Pressuremanish318Belum ada peringkat
- Basic Math & Pre-Algebra For DummiesDari EverandBasic Math & Pre-Algebra For DummiesPenilaian: 3.5 dari 5 bintang3.5/5 (6)
- Calculus Workbook For Dummies with Online PracticeDari EverandCalculus Workbook For Dummies with Online PracticePenilaian: 3.5 dari 5 bintang3.5/5 (8)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeDari EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticePenilaian: 4 dari 5 bintang4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDari EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsPenilaian: 4.5 dari 5 bintang4.5/5 (3)