Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Productionizing ML With Workflows at TwitterDokumen11 halamanProductionizing ML With Workflows at TwitterFinigan JoyceBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Benchmarking Apache Kafka - 2 Million Writes Per Second (On Three Cheap Machines) - LinkedIn EngineeringDokumen9 halamanBenchmarking Apache Kafka - 2 Million Writes Per Second (On Three Cheap Machines) - LinkedIn EngineeringFinigan JoyceBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Tslearn, A Machine Learning Toolkit For Time Series Data: January 2020Dokumen8 halamanTslearn, A Machine Learning Toolkit For Time Series Data: January 2020Finigan JoyceBelum ada peringkat
- Next-Generation Information Analytics: IDOL 10: Built For The Era of Big DataDokumen8 halamanNext-Generation Information Analytics: IDOL 10: Built For The Era of Big DataFinigan JoyceBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Observability at Twitter - Technical Overview, Part II - Twitter BlogsDokumen8 halamanObservability at Twitter - Technical Overview, Part II - Twitter BlogsFinigan JoyceBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Integrated Data Management System For Data Center: Debasis Dash, Juthika Dash, Younghee Park, Jerry GaoDokumen6 halamanIntegrated Data Management System For Data Center: Debasis Dash, Juthika Dash, Younghee Park, Jerry GaoFinigan JoyceBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Akka IO (Java)Dokumen8 halamanAkka IO (Java)Finigan JoyceBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- (轉貼) 常用英文商業書信大全(做外貿必看) at Kelvin的Blog記事本 - - 痞客邦 PIXNET - -Dokumen9 halaman(轉貼) 常用英文商業書信大全(做外貿必看) at Kelvin的Blog記事本 - - 痞客邦 PIXNET - -Finigan JoyceBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Observability at Twitter - Technical Overview, Part I - Twitter BlogsDokumen7 halamanObservability at Twitter - Technical Overview, Part I - Twitter BlogsFinigan JoyceBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Building and Running ManifoldCFDokumen17 halamanBuilding and Running ManifoldCFFinigan JoyceBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Brent OptimizationDokumen8 halamanBrent OptimizationFinigan JoyceBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- RAMI 4.0: An Architectural Model For Industrie 4.0Dokumen31 halamanRAMI 4.0: An Architectural Model For Industrie 4.0Finigan JoyceBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Flash Calculations Using The Soave-Redlich-Kwong Equation of State - File Exchange - MATLAB CentralDokumen2 halamanFlash Calculations Using The Soave-Redlich-Kwong Equation of State - File Exchange - MATLAB CentralFinigan JoyceBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- A Systematic Fault Tree Analysis Based On Multi-Level Flow ModelingDokumen7 halamanA Systematic Fault Tree Analysis Based On Multi-Level Flow ModelingFinigan JoyceBelum ada peringkat
- M9 Part1 Tier1Dokumen118 halamanM9 Part1 Tier1Finigan JoyceBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Nasa - T-MATS GitHubDokumen2 halamanNasa - T-MATS GitHubFinigan JoyceBelum ada peringkat
- SEMI E-Manufacturing StandardsDokumen33 halamanSEMI E-Manufacturing StandardsFinigan JoyceBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Slide 1: No-Churn TelecomDokumen11 halamanSlide 1: No-Churn Telecomleongladxton100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
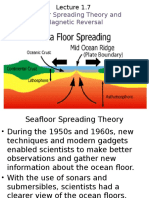
- Seafloor Spreading TheoryDokumen16 halamanSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- Datasheet Cpu 416-2Dokumen13 halamanDatasheet Cpu 416-2Danu MaldinoBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- APCO Air Valve 613Dokumen4 halamanAPCO Air Valve 613jones0055Belum ada peringkat
- Genetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)Dokumen67 halamanGenetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)rajsign5100% (3)
- Cisco Ccna Icnd PPT 2.0 OspfDokumen15 halamanCisco Ccna Icnd PPT 2.0 OspfAMIT RAJ KAUSHIKBelum ada peringkat
- Firetroll User Interface Manual Ns550f-01-Instruction-manualDokumen16 halamanFiretroll User Interface Manual Ns550f-01-Instruction-manualMike CerreroBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Intro To Decision AnalysisDokumen38 halamanIntro To Decision AnalysisAna Paula Albert100% (1)
- Camber For Construction StageDokumen18 halamanCamber For Construction StageOanh PhanBelum ada peringkat
- Decompiled With CFR ControllerDokumen3 halamanDecompiled With CFR ControllerJon EricBelum ada peringkat
- Atomic Structure ActivityDokumen4 halamanAtomic Structure ActivityClarisse BonaobraBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Nama: Ketut Dian Caturini NIM: 1813011007 Kelas: 7B Tugas 2Dokumen3 halamanNama: Ketut Dian Caturini NIM: 1813011007 Kelas: 7B Tugas 2Sri AgustiniBelum ada peringkat
- How Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorDokumen4 halamanHow Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorLucien GbezeBelum ada peringkat
- T60 Transformer Management Relay: UR Series Instruction ManualDokumen404 halamanT60 Transformer Management Relay: UR Series Instruction Manualeng amadaBelum ada peringkat
- RF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMDokumen4 halamanRF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMdolisieBelum ada peringkat
- RO400FC RO300FC Specifications - V3.2Dokumen6 halamanRO400FC RO300FC Specifications - V3.2bogdantn98Belum ada peringkat
- Seminar, Workshop, ConferenceDokumen30 halamanSeminar, Workshop, ConferenceMutharasu SBelum ada peringkat
- Sony SDM-N50R PDFDokumen76 halamanSony SDM-N50R PDFFöldi BélaBelum ada peringkat
- Jaap's Puzzle PageDokumen1 halamanJaap's Puzzle PagePhilippe DenielBelum ada peringkat
- FluidsDokumen10 halamanFluidslara alghamdiBelum ada peringkat
- Transportation ProblemDokumen3 halamanTransportation ProblemSalilBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- BQ 76 PL 102Dokumen23 halamanBQ 76 PL 102AlexBelum ada peringkat
- Differentiation11 21Dokumen75 halamanDifferentiation11 21Maryam ShahidBelum ada peringkat
- TP 3017D Taman Angkasa Nuri - V01Dokumen25 halamanTP 3017D Taman Angkasa Nuri - V01Najwa AzmanBelum ada peringkat
- Fortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationDokumen14 halamanFortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationSaid bel haj letaiefBelum ada peringkat
- Ultrasonic Insertion: Technical Information PW-4Dokumen2 halamanUltrasonic Insertion: Technical Information PW-4Miguel ArriecheBelum ada peringkat
- AdsorptionDokumen20 halamanAdsorptionNoreen Guiyab TannaganBelum ada peringkat
- Friction Stir Additive ReviewDokumen34 halamanFriction Stir Additive ReviewpeterBelum ada peringkat
- UK Assemblies PDFDokumen284 halamanUK Assemblies PDFFernando Borges ChachaBelum ada peringkat
- Astm B695-04-2009Dokumen6 halamanAstm B695-04-2009Danny TriwibowoBelum ada peringkat
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldDari EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldPenilaian: 3.5 dari 5 bintang3.5/5 (64)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceDari EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and SciencePenilaian: 4 dari 5 bintang4/5 (51)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseDari EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniversePenilaian: 3.5 dari 5 bintang3.5/5 (69)