Anda mungkin juga menyukai
- Zeigler y NicholsDokumen10 halamanZeigler y Nicholsjefemaestro91Belum ada peringkat
- Lcdtecla H 01Dokumen37 halamanLcdtecla H 01luis alberto100% (1)
- Grafcet Neumatica Paso A PasoDokumen76 halamanGrafcet Neumatica Paso A Pasojjurado183Belum ada peringkat
- Diodo Marcha LibreDokumen3 halamanDiodo Marcha LibreJuan Ramon Chavez LopezBelum ada peringkat
- Diagramas de BodeDokumen12 halamanDiagramas de BodeAlex SuáMBelum ada peringkat
- Circuito Receptor InfrarrojoDokumen9 halamanCircuito Receptor InfrarrojoDiego TeiraBelum ada peringkat
- Capitulo 1 - ProblemasDokumen11 halamanCapitulo 1 - ProblemasHerber PintoBelum ada peringkat
- Guion de Clase Analisis de La Respuesta TransitoriaDokumen7 halamanGuion de Clase Analisis de La Respuesta TransitoriaAlex GoreBelum ada peringkat
- Tarea 4 Analisis TemporalDokumen22 halamanTarea 4 Analisis TemporalJunior FigueroaBelum ada peringkat
- Labview EjerciciosDokumen19 halamanLabview EjerciciosjulpaiBelum ada peringkat
- Historia refrigeración aire acondicionadoDokumen21 halamanHistoria refrigeración aire acondicionadoJenssy ChiribogaBelum ada peringkat
- Potencia en Régimen Permanente Senoidal.Dokumen6 halamanPotencia en Régimen Permanente Senoidal.Juan Diego MuñozBelum ada peringkat
- Relacion de Problemas Instrumentacion ElectronicaDokumen12 halamanRelacion de Problemas Instrumentacion ElectronicaCheloCórdobaCádizBelum ada peringkat
- Sintonización de Controladores PIDDokumen17 halamanSintonización de Controladores PIDRonaldo Luis Guao BolañoBelum ada peringkat
- Lab 2 Sistemas Control IIDokumen3 halamanLab 2 Sistemas Control IIAlexander Quiroz CáceresBelum ada peringkat
- Circuitos PolifásicosDokumen57 halamanCircuitos PolifásicosminastirBelum ada peringkat
- Conceptos Basicos de Instrumentacion y ControlDokumen5 halamanConceptos Basicos de Instrumentacion y ControlCarlos Javier Franco MendozaBelum ada peringkat
- Unit 2 - Clasificacion Por Estructura PLCDokumen26 halamanUnit 2 - Clasificacion Por Estructura PLCJaret GarciaBelum ada peringkat
- Lab.4 - Control de Temperatura para Horno Utilizando Lenguaje FUPDokumen11 halamanLab.4 - Control de Temperatura para Horno Utilizando Lenguaje FUPOmar Ruiz Rodríguez100% (2)
- Practicas Tercer ParcialDokumen28 halamanPracticas Tercer ParcialYair FerreyraBelum ada peringkat
- Modalidades de ControlDokumen38 halamanModalidades de ControlJuan Se Uribe RamirezBelum ada peringkat
- Acciones de ControlDokumen55 halamanAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- ELECTRONEUMÁTICA MetodosDokumen10 halamanELECTRONEUMÁTICA MetodosNicolas Delgado SaavedraBelum ada peringkat
- Lab1a - Instrumentación ElectrónicaDokumen57 halamanLab1a - Instrumentación ElectrónicaOscar Lopez0% (1)
- Introducción al laboratorio de sensoresDokumen101 halamanIntroducción al laboratorio de sensoresOnassis Guzman GuzmanBelum ada peringkat
- Señales y SistemasDokumen37 halamanSeñales y SistemasWilliamChaconSanchez50% (2)
- Cuaderno de Ejercicios de Introducción A La Teoría de Control PDFDokumen37 halamanCuaderno de Ejercicios de Introducción A La Teoría de Control PDFMenelao ZubiriBelum ada peringkat
- Control de Temperaturas PIDDokumen31 halamanControl de Temperaturas PIDbenjaminBelum ada peringkat
- Curso PidDokumen39 halamanCurso PidJesus Enrique Alfonzo RiveroBelum ada peringkat
- Reporte Del Convertidor Analogico A DigitalDokumen10 halamanReporte Del Convertidor Analogico A DigitalRICHARD LAZARO0% (1)
- Control de cintas transportadoras C1 y C2 con relevadores y compuertas lógicasDokumen11 halamanControl de cintas transportadoras C1 y C2 con relevadores y compuertas lógicasMichael Chuquiruna MuñozBelum ada peringkat
- ControlTemperaturaDokumen18 halamanControlTemperaturaFabian Camacho50% (2)
- GuíaDokumen21 halamanGuíaMariana Pineda100% (1)
- Graficas Banda ProporcionalDokumen18 halamanGraficas Banda ProporcionalMarcos JimenezBelum ada peringkat
- Diseño de Lazoz Pid Por Polos y CerosDokumen19 halamanDiseño de Lazoz Pid Por Polos y Cerosavengers vengadorBelum ada peringkat
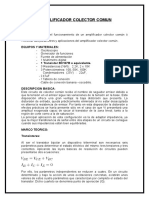
- Amplificador Colector ComunDokumen13 halamanAmplificador Colector ComunJorge Leonardo CamachoBelum ada peringkat
- Tipos de Mantenimiento IndustrialDokumen2 halamanTipos de Mantenimiento IndustrialLibreria Orellana100% (1)
- Principios de LabViewDokumen22 halamanPrincipios de LabViewAlejandro Galindo FuentesBelum ada peringkat
- Simbología de Los Instrumentos Analógicos para Mediciones EléctricasDokumen8 halamanSimbología de Los Instrumentos Analógicos para Mediciones EléctricasAlex Apaza100% (1)
- Diseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCDokumen10 halamanDiseño y Montaje de Un Controlador Pid de Posiciòn de Un Motor DCOscar Dario Cristancho SaboyaBelum ada peringkat
- Tarea 4 Control DigitalDokumen6 halamanTarea 4 Control DigitalAldo CarrilloBelum ada peringkat
- CAP - Sistemas de Primer OrdenDokumen37 halamanCAP - Sistemas de Primer OrdenAnonymous HdENZfRBelum ada peringkat
- Practica2 PID ModificadoDokumen20 halamanPractica2 PID ModificadoEnrique Romero BlancoBelum ada peringkat
- Certamen 2 Máquinas Eléctricas 2011 - IMPRESODokumen6 halamanCertamen 2 Máquinas Eléctricas 2011 - IMPRESOJérôme van der StamBelum ada peringkat
- Transformada Z (Informe Ieee) .1Dokumen6 halamanTransformada Z (Informe Ieee) .1misusibuBelum ada peringkat
- Sistemas de Control: Partes y EstrategiasDokumen25 halamanSistemas de Control: Partes y EstrategiasAdrian MorenoBelum ada peringkat
- Proyecto de InstrumentacionDokumen15 halamanProyecto de InstrumentacionRoberto AulestiaBelum ada peringkat
- Estructura y Funcionamiento de SensoresDokumen6 halamanEstructura y Funcionamiento de SensoresCristian CernaBelum ada peringkat
- 21 OptoacopladoresDokumen7 halaman21 OptoacopladoresМигель КастижоBelum ada peringkat
- Amplificadores OperacionalesDokumen43 halamanAmplificadores OperacionalesWada Estudillo100% (2)
- Contador multi-instancia PLC S7-1200Dokumen30 halamanContador multi-instancia PLC S7-1200Jorge VargasBelum ada peringkat
- Analisis Temporal y Estabilidad MatlabDokumen7 halamanAnalisis Temporal y Estabilidad MatlabJulian AvilaBelum ada peringkat
- Funciones de Los DispositivosDokumen9 halamanFunciones de Los DispositivosjjcanoolivaresBelum ada peringkat
- Sistema de Automatizacion S7 200Dokumen478 halamanSistema de Automatizacion S7 200Jhonny Zambrano SaavedraBelum ada peringkat
- Sistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosDari EverandSistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosBelum ada peringkat
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Dari EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Penilaian: 3 dari 5 bintang3/5 (1)
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDari EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaBelum ada peringkat
- Mecatrónica: modelado, simulación y control de sistemas físicosDari EverandMecatrónica: modelado, simulación y control de sistemas físicosBelum ada peringkat
- Principios del análisis de Fourier: Variaciones sobre un tema clásicoDari EverandPrincipios del análisis de Fourier: Variaciones sobre un tema clásicoBelum ada peringkat
- 03 Procedimiento para La Gestion, Planeacion, Ejecución y Seguimiento de AuditoriasDokumen56 halaman03 Procedimiento para La Gestion, Planeacion, Ejecución y Seguimiento de AuditoriasLc CaraveoBelum ada peringkat
- KoomeyDokumen14 halamanKoomeyLc CaraveoBelum ada peringkat
- 1661-Texto Del Artículo-2911-2-10-20220619Dokumen10 halaman1661-Texto Del Artículo-2911-2-10-20220619Lc CaraveoBelum ada peringkat
- Formato G1 Cantidades Generadas de Residuos para Saber Si Los Sujetos Obligados Requieren Ingresar Su Plan de Manejo de Residuos de Manejo EspecialDokumen1 halamanFormato G1 Cantidades Generadas de Residuos para Saber Si Los Sujetos Obligados Requieren Ingresar Su Plan de Manejo de Residuos de Manejo EspecialLc CaraveoBelum ada peringkat
- Cálculos de Pérdida de PresiónDokumen33 halamanCálculos de Pérdida de PresiónLc CaraveoBelum ada peringkat
- Bombeo Neumático ContinuoDokumen18 halamanBombeo Neumático ContinuoLc CaraveoBelum ada peringkat
- 1.1 Control de Pozo OkDokumen9 halaman1.1 Control de Pozo OkLc CaraveoBelum ada peringkat
- 05-MorenoDEMANDA POTENCIALDokumen18 halaman05-MorenoDEMANDA POTENCIALjazon fabian hpBelum ada peringkat
- Resumen Gas Lift SapDokumen5 halamanResumen Gas Lift SapLc CaraveoBelum ada peringkat
- Mart IlloDokumen12 halamanMart IlloLc CaraveoBelum ada peringkat
- Repaso Conduccion y Manejo de HcbsDokumen6 halamanRepaso Conduccion y Manejo de HcbsLc CaraveoBelum ada peringkat
- Bombas Rotativas Unidad 4Dokumen74 halamanBombas Rotativas Unidad 4Lc CaraveoBelum ada peringkat
- Cuestionario 1Dokumen1 halamanCuestionario 1Lc CaraveoBelum ada peringkat
- Repaso Conduccion y Manejo de HcbsDokumen6 halamanRepaso Conduccion y Manejo de HcbsLc CaraveoBelum ada peringkat
- 01.capitulo 1Dokumen26 halaman01.capitulo 1gerava182Belum ada peringkat
- Instrumentación ControladoresDokumen11 halamanInstrumentación ControladoresLc CaraveoBelum ada peringkat
- Presentacion ComicDokumen36 halamanPresentacion ComicBolivia NoicacudeBelum ada peringkat
- Coincidencias Del Euskera Con El HúngaroDokumen2 halamanCoincidencias Del Euskera Con El HúngaroAlex BestBelum ada peringkat
- Actividad Evaluativa - Eje 4 Con Cambios SANTRULE 12.2020-4Dokumen3 halamanActividad Evaluativa - Eje 4 Con Cambios SANTRULE 12.2020-4Sarith Marcelida Ariza GuillenBelum ada peringkat
- 4toprimaria Marzo2Dokumen32 halaman4toprimaria Marzo2Neri Dorantes PulidoBelum ada peringkat
- 1 Primer Discipulado La SalvacionDokumen5 halaman1 Primer Discipulado La Salvacionabdielsira50% (2)
- Rodriguez Valera, JacobDokumen2 halamanRodriguez Valera, JacobElvin Ramos BlasBelum ada peringkat
- Fichas Taxonomia BloomDokumen4 halamanFichas Taxonomia BloomrocioBelum ada peringkat
- Curiosidades Biblicas ReflexionDokumen6 halamanCuriosidades Biblicas ReflexionMARGELIS FERRER100% (1)
- 2° DPCCDokumen7 halaman2° DPCChuamaniBelum ada peringkat
- Ludwin Marquina - Tesis - Titulo Profesional - 2020 PDFDokumen82 halamanLudwin Marquina - Tesis - Titulo Profesional - 2020 PDFtwistedoachuyBelum ada peringkat
- Tabla Del Alefato Hebreo Segun El Sefer Yetzirah PDFDokumen3 halamanTabla Del Alefato Hebreo Segun El Sefer Yetzirah PDFoscarBelum ada peringkat
- Codigos Batch y ScriptsDokumen8 halamanCodigos Batch y Scriptsedwin mendozaBelum ada peringkat
- Psicologia II Pensamiento y LenguajeDokumen11 halamanPsicologia II Pensamiento y LenguajeJean MendezBelum ada peringkat
- Foro Entrevista A BOURDIEUDokumen2 halamanForo Entrevista A BOURDIEUmb lalaBelum ada peringkat
- 1ero Desp de La Ascencion 2022Dokumen2 halaman1ero Desp de La Ascencion 2022jaime_monzon_4Belum ada peringkat
- Centro Educativo "El Grillote" Preescolar Y Primaria: Tema: Signos de Interrogación Y ExclamaciónDokumen4 halamanCentro Educativo "El Grillote" Preescolar Y Primaria: Tema: Signos de Interrogación Y Exclamacióncamila pacheco contrerasBelum ada peringkat
- Resumen del cristianismo progresistaDokumen2 halamanResumen del cristianismo progresistaDAVID ISAAC CARRASCO RUFINO100% (1)
- Ensayo - Apropiacion Cultural-VasquezCarhuasAriana3roBDokumen5 halamanEnsayo - Apropiacion Cultural-VasquezCarhuasAriana3roBArianaBelum ada peringkat
- Pract Lab Micro - 12Dokumen2 halamanPract Lab Micro - 12Andrés CabayBelum ada peringkat
- Comentario de Declaración de Fe, Artículos 7,8,9 y 10.Dokumen17 halamanComentario de Declaración de Fe, Artículos 7,8,9 y 10.Emanuel MpBelum ada peringkat
- Bibliotecas programaciónDokumen14 halamanBibliotecas programaciónMartha EstradaBelum ada peringkat
- 203788-Text de L'article-272435-1-10-20101018Dokumen23 halaman203788-Text de L'article-272435-1-10-20101018Andres CabraBelum ada peringkat
- Fita 0059 MC4 U1 Ao4Dokumen3 halamanFita 0059 MC4 U1 Ao4reikiri89Belum ada peringkat
- Global 2 1 Eso LenguaDokumen3 halamanGlobal 2 1 Eso LenguaLuisaBelum ada peringkat
- s2 4 Dia 1y2 ComunicacionDokumen4 halamans2 4 Dia 1y2 ComunicacionRenzo CusihuamanBelum ada peringkat
- Los Deuterocanonicos, Los Uso Realmente Nuestro Señor JesusDokumen11 halamanLos Deuterocanonicos, Los Uso Realmente Nuestro Señor Jesusfrancisco javier romero murillo0% (1)
- Cuaderno de Informes Semana 1Dokumen8 halamanCuaderno de Informes Semana 1Sam SmithBelum ada peringkat
- Israel y La ONU - Sorprendente Cumplimiento Profetico - 70 AñosDokumen7 halamanIsrael y La ONU - Sorprendente Cumplimiento Profetico - 70 AñosDaniel UdroaicaBelum ada peringkat
- GarciaDokumen87 halamanGarciaCristina Garcia MorawetzBelum ada peringkat
- SEXTA PALABRA Mons Dario Jaramillo BuenaventuraDokumen2 halamanSEXTA PALABRA Mons Dario Jaramillo Buenaventuraisaias hernandez santiagoBelum ada peringkat