Anda mungkin juga menyukai
- Power Factor Correction FormulaDokumen1 halamanPower Factor Correction FormulaDan GrayBelum ada peringkat
- Power Factor Correction FormulaDokumen1 halamanPower Factor Correction FormulaDan GrayBelum ada peringkat
- LoadingDokumen12 halamanLoadingDan GrayBelum ada peringkat
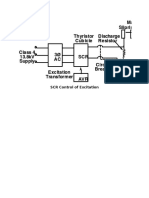
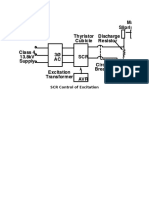
- SCR Control of ExcitationDokumen1 halamanSCR Control of ExcitationDan GrayBelum ada peringkat
- Electronic Control Systems Presentation Word 2007Dokumen127 halamanElectronic Control Systems Presentation Word 2007Dan GrayBelum ada peringkat
- SCR Control of ExcitationDokumen1 halamanSCR Control of ExcitationDan GrayBelum ada peringkat
- Synchronous Generator Supplying An Infinite Grid Objective SDokumen4 halamanSynchronous Generator Supplying An Infinite Grid Objective SDan GrayBelum ada peringkat
- Power Factor Correction FormulaDokumen1 halamanPower Factor Correction FormulaDan GrayBelum ada peringkat
- LoadingDokumen12 halamanLoadingDan GrayBelum ada peringkat
- ExcitationsysDokumen5 halamanExcitationsysDan GrayBelum ada peringkat
- SCR Control of ExcitationDokumen1 halamanSCR Control of ExcitationDan GrayBelum ada peringkat
- ExcitationDokumen5 halamanExcitationDan GrayBelum ada peringkat
- ExcitationscktDokumen4 halamanExcitationscktDan GrayBelum ada peringkat
- SCR Control of ExcitationDokumen1 halamanSCR Control of ExcitationDan GrayBelum ada peringkat
- ExcitationDokumen4 halamanExcitationDan GrayBelum ada peringkat
- ExcitationDokumen4 halamanExcitationDan GrayBelum ada peringkat
- SynchDokumen13 halamanSynchDan GrayBelum ada peringkat
- ExcitationRDokumen4 halamanExcitationRDan GrayBelum ada peringkat
- LoadingDokumen12 halamanLoadingDan GrayBelum ada peringkat
- LoadingDokumen12 halamanLoadingDan GrayBelum ada peringkat
- LimitsDokumen6 halamanLimitsDan GrayBelum ada peringkat
- ExcitationDokumen4 halamanExcitationDan GrayBelum ada peringkat
- FiniteDokumen7 halamanFiniteDan GrayBelum ada peringkat
- Synchronous Generator Supplying An Infinite Grid Objective SDokumen4 halamanSynchronous Generator Supplying An Infinite Grid Objective SDan GrayBelum ada peringkat
- LoadingDokumen12 halamanLoadingDan GrayBelum ada peringkat
- ExcitationDokumen4 halamanExcitationDan GrayBelum ada peringkat
- Generator and Transmission Line StabilityDokumen27 halamanGenerator and Transmission Line StabilityDan GrayBelum ada peringkat
- OverfluxingDokumen5 halamanOverfluxingDan GrayBelum ada peringkat
- Synchronous Generator Supplying An Infinite Grid Objective SDokumen4 halamanSynchronous Generator Supplying An Infinite Grid Objective SDan GrayBelum ada peringkat
- SynchDokumen13 halamanSynchDan GrayBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Timothy Prehn CV 021209Dokumen4 halamanTimothy Prehn CV 021209Jason GomezBelum ada peringkat
- Objective QuestionsDokumen19 halamanObjective QuestionsDeepak SharmaBelum ada peringkat
- MST 2 ReviewerDokumen4 halamanMST 2 ReviewerAizha NarioBelum ada peringkat
- Engine Controls (Powertrain Management) - ALLDATA RepairDokumen5 halamanEngine Controls (Powertrain Management) - ALLDATA RepairXavier AlvarezBelum ada peringkat
- Wiley Wesleyan UniversityDokumen36 halamanWiley Wesleyan UniversityBirunda SilvaBelum ada peringkat
- Tailwind OperationsDokumen3 halamanTailwind Operationsiceman737Belum ada peringkat
- 6.1.3 Final Exam - Exam (Exam)Dokumen8 halaman6.1.3 Final Exam - Exam (Exam)parker3poseyBelum ada peringkat
- SEM 3037E Tower Piping.Dokumen52 halamanSEM 3037E Tower Piping.Kodali Naveen KumarBelum ada peringkat
- The Godfather Term One Sample Basic Six Annual Scheme of Learning Termly Scheme of Learning WEEK 1 - 12Dokumen313 halamanThe Godfather Term One Sample Basic Six Annual Scheme of Learning Termly Scheme of Learning WEEK 1 - 12justice hayfordBelum ada peringkat
- Drag Embedded AnchorsDokumen6 halamanDrag Embedded AnchorsrussellboxhallBelum ada peringkat
- Lec08 (Topic 4 Define Classes)Dokumen33 halamanLec08 (Topic 4 Define Classes)huaiencheengBelum ada peringkat
- Dball-Gm5 en Ig Cp20110328aDokumen18 halamanDball-Gm5 en Ig Cp20110328aMichael MartinezBelum ada peringkat
- Final System DocumentationDokumen31 halamanFinal System DocumentationEunice AquinoBelum ada peringkat
- Pop-Up SystemDokumen4 halamanPop-Up Systemkothat82Belum ada peringkat
- PrEN 12271-10 - Factory Production ControlDokumen17 halamanPrEN 12271-10 - Factory Production ControlPedjaBelum ada peringkat
- Designers' Guide To Eurocode 7 Geothechnical DesignDokumen213 halamanDesigners' Guide To Eurocode 7 Geothechnical DesignJoão Gamboias100% (9)
- 1136 E01-ML01DP5 Usermanual EN V1.2Dokumen11 halaman1136 E01-ML01DP5 Usermanual EN V1.2HectorBelum ada peringkat
- Understanding Logistics and Supply Chain Management ConceptsDokumen12 halamanUnderstanding Logistics and Supply Chain Management Conceptsarfat kabraBelum ada peringkat
- Mock PPT 2023 TietDokumen22 halamanMock PPT 2023 Tiettsai42zigBelum ada peringkat
- Language Culture and ThoughtDokumen24 halamanLanguage Culture and ThoughtLý Hiển NhiênBelum ada peringkat
- ADL MATRIX STRATEGY FOR BPCL'S GROWTHDokumen17 halamanADL MATRIX STRATEGY FOR BPCL'S GROWTHSachin Nagar100% (1)
- Dewatering Well PointsDokumen4 halamanDewatering Well Pointssalloum3Belum ada peringkat
- CA Module Franklin Gari RDokumen28 halamanCA Module Franklin Gari RFranklin GariBelum ada peringkat
- Use DCP to Predict Soil Bearing CapacityDokumen11 halamanUse DCP to Predict Soil Bearing CapacitysarvaiyahimmatBelum ada peringkat
- HWXX 6516DS1 VTM PDFDokumen1 halamanHWXX 6516DS1 VTM PDFDmitriiSpiridonovBelum ada peringkat
- The Importance of WritingDokumen4 halamanThe Importance of WritingBogdan VasileBelum ada peringkat
- Lecture 6Dokumen16 halamanLecture 6Dina Saad EskandereBelum ada peringkat
- Main Sulci & Fissures: Cerebral FissureDokumen17 halamanMain Sulci & Fissures: Cerebral FissureNagbhushan BmBelum ada peringkat
- Mindfulness With Collegiate Gymnasts - Effects On Flow, Stress and Overall Mindfulness LevelsNicholas P. Cherupa,, Zeljka VidicDokumen13 halamanMindfulness With Collegiate Gymnasts - Effects On Flow, Stress and Overall Mindfulness LevelsNicholas P. Cherupa,, Zeljka VidicGABRIELBelum ada peringkat
- Subject and Content NotesDokumen52 halamanSubject and Content NotesJoe Carl CastilloBelum ada peringkat