Anda mungkin juga menyukai
- Ray Casting 1Dokumen14 halamanRay Casting 1Jovana KnezevicBelum ada peringkat
- Basic Mathematics of ProjectionDokumen63 halamanBasic Mathematics of ProjectionAidan CelesteBelum ada peringkat
- HPH103 - Waves and Optics 1 - Lecture # 10-1Dokumen45 halamanHPH103 - Waves and Optics 1 - Lecture # 10-1Praise NehumambiBelum ada peringkat
- L2v1 Image FormationDokumen42 halamanL2v1 Image FormationAgha KazimBelum ada peringkat
- LightDokumen46 halamanLightSrinath BandaruBelum ada peringkat
- Projections and Camera Calibration: Man-522: Computer Vision SET-2Dokumen98 halamanProjections and Camera Calibration: Man-522: Computer Vision SET-2Planetary RunnerBelum ada peringkat
- Computer Vision - Image Formation (Camera) - 1Dokumen27 halamanComputer Vision - Image Formation (Camera) - 1Lê Thành TrungBelum ada peringkat
- Global Illumination: Jian Huang, CS 594, Fall 2002Dokumen37 halamanGlobal Illumination: Jian Huang, CS 594, Fall 2002Suraj KumarBelum ada peringkat
- Ray TracingDokumen49 halamanRay TracingsoogonyooBelum ada peringkat
- CV NotesDokumen204 halamanCV NotesEthicalHacker.com.Belum ada peringkat
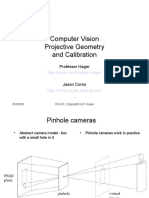
- Computer Vision Projective Geometry and Calibration: Professor HagerDokumen67 halamanComputer Vision Projective Geometry and Calibration: Professor Hagersab108Belum ada peringkat
- Waveguides Derived: Geometry of WavesDokumen15 halamanWaveguides Derived: Geometry of WavesRio CarthiisBelum ada peringkat
- L9 Rediometry of Image FormationDokumen14 halamanL9 Rediometry of Image FormationApple ForScaleBelum ada peringkat
- 10 StereoDokumen131 halaman10 StereoUdaranga WickramasingheBelum ada peringkat
- Chapter 12 ADokumen57 halamanChapter 12 A123456ranoBelum ada peringkat
- Radiometry of Image Formation (Computer Vision)Dokumen14 halamanRadiometry of Image Formation (Computer Vision)Anukriti BansalBelum ada peringkat
- 3b - Projective Geometry and Camera ModelsDokumen54 halaman3b - Projective Geometry and Camera Modelschí an lêBelum ada peringkat
- Photoframmetry SupplementDokumen4 halamanPhotoframmetry SupplementBreeBelum ada peringkat
- 002 10jan ch03Dokumen27 halaman002 10jan ch03Andie AcostaBelum ada peringkat
- Optical TelescopeDokumen30 halamanOptical TelescopeAbdul Rasyid ZakariaBelum ada peringkat
- IIS & M, Survey of IndiaDokumen38 halamanIIS & M, Survey of Indiasaurabh101joshiBelum ada peringkat
- Cameras and GeometryDokumen49 halamanCameras and GeometryOscar PetersBelum ada peringkat
- L2 ImageFormationRepresentationDokumen69 halamanL2 ImageFormationRepresentationAndreea TicalaBelum ada peringkat
- Cameras Camera Obscura: (Reading: Chapter 1)Dokumen5 halamanCameras Camera Obscura: (Reading: Chapter 1)marjaaaaaBelum ada peringkat
- Image Formation and Ray Diagrams Involving MirrorsDokumen75 halamanImage Formation and Ray Diagrams Involving Mirrorsjohn charles garalde100% (1)
- PDST Physics - Mirrors PlaneDokumen28 halamanPDST Physics - Mirrors Planeapi-299811822Belum ada peringkat
- Image Formation: - The Two Parts of The Image Formation ProcessDokumen9 halamanImage Formation: - The Two Parts of The Image Formation ProcessRaaja RajaBelum ada peringkat
- Light PresentationDokumen91 halamanLight PresentationRohan SinghBelum ada peringkat
- 09 Raytracing BasicsDokumen32 halaman09 Raytracing BasicsmarcoxshjupasBelum ada peringkat
- Fundamentals of Robot Intelligence WAES3102: Sensors Sonar Laser Vision Theoretical Considerations in DesignDokumen39 halamanFundamentals of Robot Intelligence WAES3102: Sensors Sonar Laser Vision Theoretical Considerations in DesignKC KoayBelum ada peringkat
- SimplificationDokumen37 halamanSimplificationziliang.miao26Belum ada peringkat
- Advance Computer Graphic (CP222) : Prepared by Harsora VinayDokumen41 halamanAdvance Computer Graphic (CP222) : Prepared by Harsora VinayAnilkumar KondaBelum ada peringkat
- 02Dokumen48 halaman02Yogesh KatreBelum ada peringkat
- Image Formation: - The Two Parts of The Image Formation ProcessDokumen9 halamanImage Formation: - The Two Parts of The Image Formation ProcessAaqib IhrazBelum ada peringkat
- 08 Raytracing BasicsDokumen32 halaman08 Raytracing Basicsxliudt.ust.hkBelum ada peringkat
- Computer Graphics: Rahmat Ullah KhanDokumen14 halamanComputer Graphics: Rahmat Ullah KhanMuqadar AliBelum ada peringkat
- Light Chapter'sDokumen24 halamanLight Chapter'sPratik ChavanBelum ada peringkat
- 09 Raytracing BasicsDokumen27 halaman09 Raytracing BasicsTommy KongBelum ada peringkat
- 26 StereoDokumen39 halaman26 StereoxolraxBelum ada peringkat
- ESC103 Final Exam Dec 2011 Sir Arthur Lewis Community CollegeDokumen7 halamanESC103 Final Exam Dec 2011 Sir Arthur Lewis Community Collegeanonslu2012Belum ada peringkat
- Image Formation in Man and MachinesDokumen45 halamanImage Formation in Man and MachinessatyabashaBelum ada peringkat
- SCIENCE 10 (2nd Quarter Reviewer)Dokumen11 halamanSCIENCE 10 (2nd Quarter Reviewer)hvixenalbano13Belum ada peringkat
- Optics Cheat SheetDokumen1 halamanOptics Cheat SheetAakash Akronos67% (3)
- Optics Cheat SheetDokumen1 halamanOptics Cheat Sheetadamhameleh100% (1)
- Class 03 Virtual WorldDokumen31 halamanClass 03 Virtual WorldMounir BoukhiberBelum ada peringkat
- Depth PerceptionDokumen18 halamanDepth PerceptionNeha VermaBelum ada peringkat
- Radiometry of Image Forma0on: Jitendra MalikDokumen14 halamanRadiometry of Image Forma0on: Jitendra MalikElisée Ndjabu DHBelum ada peringkat
- Now PlayingDokumen68 halamanNow PlayingCharles MatuBelum ada peringkat
- Smallpt: Global Illumination in 99 Lines of C++ A Ray Tracer by Kevin BeasonDokumen77 halamanSmallpt: Global Illumination in 99 Lines of C++ A Ray Tracer by Kevin BeasonShubham JalanBelum ada peringkat
- Fundamentals 07 4Dokumen150 halamanFundamentals 07 4api-3841794100% (2)
- Prof. Reuven Aviv Department of Computer Science Tel Hai Academic College Computer GraphicsDokumen24 halamanProf. Reuven Aviv Department of Computer Science Tel Hai Academic College Computer Graphicskenshin3000Belum ada peringkat
- Light Waves, Mirrors and Reflection: Physics 1 PAPDokumen24 halamanLight Waves, Mirrors and Reflection: Physics 1 PAParjun guptaBelum ada peringkat
- Plane MirrorDokumen1 halamanPlane MirrorKayla FreilichBelum ada peringkat
- 3D Reconstruction: Standard Stereo SetupDokumen17 halaman3D Reconstruction: Standard Stereo SetupAnukriti BansalBelum ada peringkat
- Unit Iv - Part IiDokumen60 halamanUnit Iv - Part IiVamsi KrishnaBelum ada peringkat
- Powerpoint - PAP - Light Waves Reflection and MirrorsDokumen24 halamanPowerpoint - PAP - Light Waves Reflection and MirrorsAtharvvaBelum ada peringkat
- Lecture 8cDokumen29 halamanLecture 8cs_paraisoBelum ada peringkat
- Thin Lenses: Prepared By: Jenno S. Lantaya, OdDokumen31 halamanThin Lenses: Prepared By: Jenno S. Lantaya, OdKwenzie FortalezaBelum ada peringkat
- Strike RiskDokumen4 halamanStrike RiskAdilson Leite ProençaBelum ada peringkat
- Noise in Fiber Optic Communication LinksDokumen14 halamanNoise in Fiber Optic Communication Linksian.maximillianBelum ada peringkat
- FSX Cessna 172SP OldDokumen4 halamanFSX Cessna 172SP Oldaccgh5Belum ada peringkat
- Pipe Fabrication Brochure CompressedDokumen2 halamanPipe Fabrication Brochure CompressedLeDzungBelum ada peringkat
- Rangkaian Om Telolet OmDokumen5 halamanRangkaian Om Telolet Omwalid suwalidBelum ada peringkat
- En 2014 New Brochure WebDokumen20 halamanEn 2014 New Brochure WebSasa NackovicBelum ada peringkat
- MATERI 7aDokumen56 halamanMATERI 7aFriska SologiaBelum ada peringkat
- Exploit Writing Tutorial Part 1 - Stack Based Overflows - Corelan TeamDokumen54 halamanExploit Writing Tutorial Part 1 - Stack Based Overflows - Corelan Teamdamir_krstanovicBelum ada peringkat
- 5 - WQU - 622 CTSP - M5 - CompiledContentDokumen34 halaman5 - WQU - 622 CTSP - M5 - CompiledContentJoe NgBelum ada peringkat
- Criminological Research 2023Dokumen41 halamanCriminological Research 2023Justin Jade AlmerezBelum ada peringkat
- MPMC Unit 2Dokumen31 halamanMPMC Unit 2nikitaBelum ada peringkat
- Strength of Materials Unit 3 Question Bank: Jansons Institute of TechnologyDokumen3 halamanStrength of Materials Unit 3 Question Bank: Jansons Institute of TechnologyVasanth KumarBelum ada peringkat
- Escape Velocity PDFDokumen5 halamanEscape Velocity PDFRatriBelum ada peringkat
- On Predicting Roller Milling Performance Part II. The Breakage FunctionDokumen13 halamanOn Predicting Roller Milling Performance Part II. The Breakage FunctionKenneth AdamsBelum ada peringkat
- Bio Sem2 EssayDokumen2 halamanBio Sem2 EssayEileen WongBelum ada peringkat
- Structure HarvesterDokumen3 halamanStructure HarvesterOliva R. SeguraBelum ada peringkat
- CADCAM PortfolioDokumen5 halamanCADCAM PortfolioGuhan MBelum ada peringkat
- Scale Drawing and Scale Models RubricDokumen1 halamanScale Drawing and Scale Models RubricArgoNavisBelum ada peringkat
- B.S. in Electronics Engineering - BSECE 2008 - 2009Dokumen2 halamanB.S. in Electronics Engineering - BSECE 2008 - 2009Vallar RussBelum ada peringkat
- A Detailed Lesson PlanDokumen13 halamanA Detailed Lesson PlanReynaldo Quines Bohol100% (16)
- Technical Drafting I: (Manual Drafting) 2Nd SemesterDokumen18 halamanTechnical Drafting I: (Manual Drafting) 2Nd SemesterhakkensBelum ada peringkat
- Tafl KCS 402 Cia-I 2019-20Dokumen2 halamanTafl KCS 402 Cia-I 2019-20vikBelum ada peringkat
- Fuse Link KDokumen6 halamanFuse Link KABam BambumBelum ada peringkat
- Reviewer MathDokumen6 halamanReviewer MathLuna Ronquillo100% (1)
- Dashboard Design Best PracticesDokumen43 halamanDashboard Design Best Practicesgabriel_babiano8003100% (4)
- 30 MT Tyre Mounted Crane SpecificationsDokumen4 halaman30 MT Tyre Mounted Crane SpecificationsramyaBelum ada peringkat
- Ap Computer Science A Course OverviewDokumen2 halamanAp Computer Science A Course Overviewbaojia chenBelum ada peringkat
- The Effecto of Using Deductive ApproachDokumen15 halamanThe Effecto of Using Deductive ApproachCarmela EstradaBelum ada peringkat
- Velocity Analysis-Instantaneous Center MDokumen7 halamanVelocity Analysis-Instantaneous Center MSuman_SamadderBelum ada peringkat
- AlkylationDokumen42 halamanAlkylationRafi Algawi100% (1)