Anda mungkin juga menyukai
- ZA11 00 Art12Dokumen37 halamanZA11 00 Art12YolitaBerenizeD.GonzalesBelum ada peringkat
- Work in Progress PlantillaDokumen3 halamanWork in Progress PlantillaYolitaBerenizeD.GonzalesBelum ada peringkat
- Work in Progress PlantillaDokumen3 halamanWork in Progress PlantillaYolitaBerenizeD.GonzalesBelum ada peringkat
- Diseño Del SevicioDokumen22 halamanDiseño Del SevicioYolitaBerenizeD.GonzalesBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- BigoposterDokumen1 halamanBigoposterKim MonzonBelum ada peringkat
- Network Model Aplikasi QM For WindowsDokumen5 halamanNetwork Model Aplikasi QM For WindowsJoven CastilloBelum ada peringkat
- Faster Route Planning with Contraction HierarchiesDokumen30 halamanFaster Route Planning with Contraction Hierarchiesmadan321Belum ada peringkat
- Lab 4 - DFSDokumen8 halamanLab 4 - DFSBusinessmanBelum ada peringkat
- Lab Manual MCSE 101Dokumen35 halamanLab Manual MCSE 101Juan JacksonBelum ada peringkat
- Ece345 Weekly TaskDokumen1 halamanEce345 Weekly TaskLBJBelum ada peringkat
- Week 4 Session 5 Greedy Methods: COMP6127 - Algorithm Design and AnalysisDokumen32 halamanWeek 4 Session 5 Greedy Methods: COMP6127 - Algorithm Design and AnalysisAliefBelum ada peringkat
- GBFS 10 21Dokumen5 halamanGBFS 10 21Mohammad JubayerBelum ada peringkat
- Uninformed Searching AIDokumen58 halamanUninformed Searching AIPrakhar PathakBelum ada peringkat
- Design & Analysis of Algorithms Lab ManualDokumen84 halamanDesign & Analysis of Algorithms Lab Manualalgatesgiri100% (1)
- Bubble Sort in CDokumen5 halamanBubble Sort in CThomas ShelbyBelum ada peringkat
- Greedy Best-First Search NotesDokumen19 halamanGreedy Best-First Search NotesRAMAN KUMARBelum ada peringkat
- AOA Analysis of Well Known AlgorithmsDokumen29 halamanAOA Analysis of Well Known AlgorithmsBalaji JadhavBelum ada peringkat
- Demonstration of Heap & Quick Sorting Techniques: Presented By: Group No-22, Section-3C Roll No.s-57,16Dokumen11 halamanDemonstration of Heap & Quick Sorting Techniques: Presented By: Group No-22, Section-3C Roll No.s-57,16taniaBelum ada peringkat
- Quick SortDokumen15 halamanQuick SortAdeel DurraniBelum ada peringkat
- DAA Approximation AlgorithmsDokumen32 halamanDAA Approximation AlgorithmsAnn thabithaBelum ada peringkat
- Review of Various Sorting AlgorithmsDokumen3 halamanReview of Various Sorting Algorithmsshilpa dirisalaBelum ada peringkat
- Scintific Report TumaiDokumen7 halamanScintific Report TumaiartwelltoneBelum ada peringkat
- Unit 1 Graph Algorithms-Ii: Structure Page NoDokumen32 halamanUnit 1 Graph Algorithms-Ii: Structure Page NofranklinBelum ada peringkat
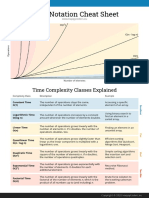
- Big O Notation Cheat Sheet: Time Complexity Classes ExplainedDokumen1 halamanBig O Notation Cheat Sheet: Time Complexity Classes ExplainedEmam HasanBelum ada peringkat
- Max-Flow Min-Cut ProblemsDokumen9 halamanMax-Flow Min-Cut ProblemsJuan Miguel GarciaBelum ada peringkat
- Bubble Sort Cocktail Sort: A Group Project On Fundamentals of Computing 1Dokumen13 halamanBubble Sort Cocktail Sort: A Group Project On Fundamentals of Computing 1Mariebeth SenoBelum ada peringkat
- Insertion Sort (With Code in Python-C++-Java-C)Dokumen11 halamanInsertion Sort (With Code in Python-C++-Java-C)Thee KullateeBelum ada peringkat
- Christos Papadimitriou - Combinatorial - Optimization - Algorithms - and - Complexity PDFDokumen9 halamanChristos Papadimitriou - Combinatorial - Optimization - Algorithms - and - Complexity PDFAlex AdamiteiBelum ada peringkat
- DATA STRUCTURES AND ALGORITHMS - Unit 5Dokumen35 halamanDATA STRUCTURES AND ALGORITHMS - Unit 5BOMMA SRI MUKHIBelum ada peringkat
- Nabil Mohsen AlzeqriDokumen7 halamanNabil Mohsen AlzeqriNabil AlzeqriBelum ada peringkat
- Minimum and MaximumDokumen28 halamanMinimum and MaximumDinoBelum ada peringkat
- Lab ManualDokumen10 halamanLab ManualDhruvil ShahBelum ada peringkat
- Radix SortDokumen58 halamanRadix SortKrisha DavdaBelum ada peringkat
- Analysis and Design of Algorithms1Dokumen3 halamanAnalysis and Design of Algorithms1Harendra KumarBelum ada peringkat