Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
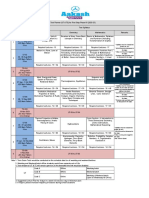
- UT & TE Planner - AY 2023-24 - Phase-01Dokumen1 halamanUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarBelum ada peringkat
- Module 3 - Lesson 3.1Dokumen2 halamanModule 3 - Lesson 3.1Cj RomoBelum ada peringkat
- List of Saturday Opened Branches and Sub BranchesDokumen12 halamanList of Saturday Opened Branches and Sub BranchesSarmad SonyalBelum ada peringkat
- AASW Code of Ethics-2004Dokumen36 halamanAASW Code of Ethics-2004Steven TanBelum ada peringkat
- Introduction To Instrumented IndentationDokumen7 halamanIntroduction To Instrumented Indentationopvsj42Belum ada peringkat
- Mathematics: Quarter 3 - Module 6Dokumen15 halamanMathematics: Quarter 3 - Module 6Ray Phillip G. Jorduela0% (1)
- GearsDokumen14 halamanGearsZulhilmi Chik TakBelum ada peringkat
- CU 8. Johnsons Roy NeumanDokumen41 halamanCU 8. Johnsons Roy NeumanPatrick MatubayBelum ada peringkat
- Practice Test 4 For Grade 12Dokumen5 halamanPractice Test 4 For Grade 12MAx IMp BayuBelum ada peringkat
- Reliability Technoology For Submarine Repeaters PDFDokumen8 halamanReliability Technoology For Submarine Repeaters PDFbolermBelum ada peringkat
- Simulation of Channel Estimation and Equalization For WiMAX PHY Layer in Simulink PDFDokumen6 halamanSimulation of Channel Estimation and Equalization For WiMAX PHY Layer in Simulink PDFayadmanBelum ada peringkat
- Research ProposalDokumen18 halamanResearch ProposalIsmaelBelum ada peringkat
- STAFFINGDokumen6 halamanSTAFFINGSaloni AgrawalBelum ada peringkat
- DND Homebrew Ideas V1 - The HomebreweryDokumen3 halamanDND Homebrew Ideas V1 - The HomebreweryKalazans CardialBelum ada peringkat
- Dispersion Compensation FibreDokumen16 halamanDispersion Compensation FibreGyana Ranjan MatiBelum ada peringkat
- GRADE 1 To 12 Daily Lesson LOG: TLE6AG-Oc-3-1.3.3Dokumen7 halamanGRADE 1 To 12 Daily Lesson LOG: TLE6AG-Oc-3-1.3.3Roxanne Pia FlorentinoBelum ada peringkat
- Annexure 8: Medical Certificate (To Be Issued by A Registered Medical Practitioner) General ExpectationsDokumen1 halamanAnnexure 8: Medical Certificate (To Be Issued by A Registered Medical Practitioner) General ExpectationsMannepalli RamakrishnaBelum ada peringkat
- The Importance of Logo DesignDokumen1 halamanThe Importance of Logo DesignDanielBelum ada peringkat
- Service and Maintenance Manual AFPX 513 PDFDokumen146 halamanService and Maintenance Manual AFPX 513 PDFManuel Amado Montoya AgudeloBelum ada peringkat
- K9G8G08B0B SamsungDokumen43 halamanK9G8G08B0B SamsungThienBelum ada peringkat
- SEx 3Dokumen33 halamanSEx 3Amir Madani100% (4)
- Hilti Product Technical GuideDokumen16 halamanHilti Product Technical Guidegabox707Belum ada peringkat
- Case AnalysisDokumen25 halamanCase AnalysisGerly LagutingBelum ada peringkat
- Reported Speech StatementsDokumen1 halamanReported Speech StatementsEmilijus Bartasevic100% (1)
- Sample Midterm ExamDokumen6 halamanSample Midterm ExamRenel AluciljaBelum ada peringkat
- The Preparedness of The Data Center College of The Philippines To The Flexible Learning Amidst Covid-19 PandemicDokumen16 halamanThe Preparedness of The Data Center College of The Philippines To The Flexible Learning Amidst Covid-19 PandemicInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Finding Nemo 2Dokumen103 halamanFinding Nemo 2julianaBelum ada peringkat
- Daud Kamal and Taufiq Rafaqat PoemsDokumen9 halamanDaud Kamal and Taufiq Rafaqat PoemsFatima Ismaeel33% (3)
- Validator in JSFDokumen5 halamanValidator in JSFvinh_kakaBelum ada peringkat