Anda mungkin juga menyukai
- Eepw q1 PracticalDokumen11 halamanEepw q1 PracticalPandimadevi SelvakumarBelum ada peringkat
- ENGPRFORM 2 V2 Project Proposal Submission - 2015013Dokumen1 halamanENGPRFORM 2 V2 Project Proposal Submission - 2015013Pandimadevi SelvakumarBelum ada peringkat
- CBSE Worksheet on DecimalsDokumen2 halamanCBSE Worksheet on DecimalsPandimadevi SelvakumarBelum ada peringkat
- Chapter 4 HW Solution: Review QuestionsDokumen7 halamanChapter 4 HW Solution: Review QuestionsPandimadevi SelvakumarBelum ada peringkat
- Project ApprovalDokumen4 halamanProject ApprovalPandimadevi SelvakumarBelum ada peringkat
- Chapter 4 HW Solution: Review QuestionsDokumen7 halamanChapter 4 HW Solution: Review QuestionsPandimadevi SelvakumarBelum ada peringkat
- Viva QuestionDokumen5 halamanViva QuestionPandimadevi SelvakumarBelum ada peringkat
- State and State SpaceDokumen76 halamanState and State Spacesohaib389892Belum ada peringkat
- ET-exp 6 - CROPhase Angle MeasurementDokumen4 halamanET-exp 6 - CROPhase Angle MeasurementPandimadevi SelvakumarBelum ada peringkat
- Playing with Numbers - Factors, Multiples, Divisibility Rules & HCF LCMDokumen2 halamanPlaying with Numbers - Factors, Multiples, Divisibility Rules & HCF LCMPandimadevi SelvakumarBelum ada peringkat
- Department Name Lecturer Mobile NoDokumen3 halamanDepartment Name Lecturer Mobile NoPandimadevi SelvakumarBelum ada peringkat
- Chapter 2 Electrical Power Sec 2Dokumen32 halamanChapter 2 Electrical Power Sec 2Pandimadevi SelvakumarBelum ada peringkat
- Recei PesDokumen8 halamanRecei PesPandimadevi SelvakumarBelum ada peringkat
- Unenroll Students in MoodleDokumen2 halamanUnenroll Students in MoodlePandimadevi SelvakumarBelum ada peringkat
- Eepw q1 PracticalDokumen11 halamanEepw q1 PracticalPandimadevi SelvakumarBelum ada peringkat
- H BridgeDokumen6 halamanH BridgePandimadevi SelvakumarBelum ada peringkat
- CISE 312 Instrumentation Engineering Lab ManualDokumen89 halamanCISE 312 Instrumentation Engineering Lab ManualPandimadevi SelvakumarBelum ada peringkat
- Instrumentation & Control HandoutDokumen95 halamanInstrumentation & Control HandoutPandimadevi SelvakumarBelum ada peringkat
- CISE 312 Instrumentation Engineering Lab ManualDokumen89 halamanCISE 312 Instrumentation Engineering Lab ManualPandimadevi SelvakumarBelum ada peringkat
- 736418Dokumen22 halaman736418Pandimadevi SelvakumarBelum ada peringkat
- Introduction To Modulation and DemodulationDokumen77 halamanIntroduction To Modulation and Demodulationkavish malakaBelum ada peringkat
- Measuring Temperature with Thermocouples and RTDsDokumen11 halamanMeasuring Temperature with Thermocouples and RTDsPandimadevi SelvakumarBelum ada peringkat
- Chapter 2 FinalDokumen15 halamanChapter 2 FinalPandimadevi SelvakumarBelum ada peringkat
- 501B B.P.S. V S.A. I II EVS Science Social Science Chapterwise 3 Printable Worksheets With Solution 2014 15Dokumen173 halaman501B B.P.S. V S.A. I II EVS Science Social Science Chapterwise 3 Printable Worksheets With Solution 2014 15Pandimadevi SelvakumarBelum ada peringkat
- CapsaDokumen4 halamanCapsasumikannuBelum ada peringkat
- Gsmbasedborewellwaterlevelmonitor 130824021535 Phpapp02Dokumen4 halamanGsmbasedborewellwaterlevelmonitor 130824021535 Phpapp02Pandimadevi SelvakumarBelum ada peringkat
- Ch-3Measuring Instruments EEPWDokumen12 halamanCh-3Measuring Instruments EEPWPandimadevi SelvakumarBelum ada peringkat
- 32 Diet Recipes - Tamil MagazinesDokumen11 halaman32 Diet Recipes - Tamil MagazinesPandimadevi Selvakumar0% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Genetic AlgorithmsDokumen41 halamanGenetic Algorithms1balamanian100% (2)
- Technology and Science in Ancient Civilizations PDFDokumen276 halamanTechnology and Science in Ancient Civilizations PDFjuanan6967% (3)
- Electrical Mechanical Manufacturing Engineer in San Diego CA Resume Andy SalceDokumen3 halamanElectrical Mechanical Manufacturing Engineer in San Diego CA Resume Andy SalceAndySalceBelum ada peringkat
- Simply Supported Beam Analysis (Visual C++)Dokumen4 halamanSimply Supported Beam Analysis (Visual C++)praxie63% (8)
- Your Milan to Basel Bus TicketDokumen2 halamanYour Milan to Basel Bus TicketJaideep K.visaveBelum ada peringkat
- A.P.Senthil: Mobile: 9524402624Dokumen3 halamanA.P.Senthil: Mobile: 9524402624ngrajunklchennaiBelum ada peringkat
- Impedance in Audio Lundahl TransformerDokumen6 halamanImpedance in Audio Lundahl TransformerVũThậpBelum ada peringkat
- Product Guide o e w20Dokumen256 halamanProduct Guide o e w20Fitricia Putri100% (1)
- RCMRD Recruiting Short-Term Research Assistants KenyaDokumen2 halamanRCMRD Recruiting Short-Term Research Assistants KenyaAlvine KBelum ada peringkat
- DuraTrack HZ v3 DatasheetDokumen2 halamanDuraTrack HZ v3 DatasheetkamaleshsBelum ada peringkat
- Rural Pricing StrategyDokumen20 halamanRural Pricing StrategyRamesh JunejaBelum ada peringkat
- 121Dokumen4 halaman121Oecox Cah DjadoelBelum ada peringkat
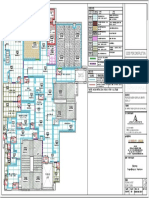
- 7.flooring Layout (Fourth Floor)Dokumen1 halaman7.flooring Layout (Fourth Floor)Shubham PokhriyalBelum ada peringkat
- HCC/HCF4042B: Quad Clocked "D" LatchDokumen13 halamanHCC/HCF4042B: Quad Clocked "D" LatchjuenkkinBelum ada peringkat
- 1 Lower Extremities 2009 CatalogueDokumen335 halaman1 Lower Extremities 2009 CatalogueOthman FalconBelum ada peringkat
- 1-Gas Turbine DesignDokumen56 halaman1-Gas Turbine DesignMohammed Yusuf100% (2)
- HR Generalist Roles and ResponsibilitiesDokumen83 halamanHR Generalist Roles and ResponsibilitiesSurabhi Jain0% (1)
- Bob Boyce - Inventor's Terminal Cancer Courtesy of Verichip - Targeted IndividualsDokumen13 halamanBob Boyce - Inventor's Terminal Cancer Courtesy of Verichip - Targeted IndividualsTortured-Targeted-Individuals100% (2)
- Power Semiconductor Devices ThyristorsDokumen140 halamanPower Semiconductor Devices ThyristorsNomanBelum ada peringkat
- Hull Design in NapaDokumen40 halamanHull Design in NapaSurya Chala PraveenBelum ada peringkat
- Feed Segment Brochure GBDokumen16 halamanFeed Segment Brochure GBFernando FuentesBelum ada peringkat
- Harvard Style-1Dokumen6 halamanHarvard Style-1Pamornwan NanBelum ada peringkat
- F3B-07!01!2014 Gearbox ManualDokumen39 halamanF3B-07!01!2014 Gearbox ManualMartin PayneBelum ada peringkat
- S570 Manual de Partes - Bobcat PDFDokumen484 halamanS570 Manual de Partes - Bobcat PDFNestor Ruiz Torres75% (4)
- Thinking Education Through PhilosophyDokumen36 halamanThinking Education Through PhilosophyZorayma NavarroBelum ada peringkat
- Bond Strength of Mortar To Masonry Units: Standard Test Method ForDokumen8 halamanBond Strength of Mortar To Masonry Units: Standard Test Method ForFranky HernandezBelum ada peringkat
- Entreprenuerial Skills SurveyDokumen42 halamanEntreprenuerial Skills SurveyversmajardoBelum ada peringkat
- 13 07 2023 Nandhu Shiri Bill 1Dokumen3 halaman13 07 2023 Nandhu Shiri Bill 1Mana RashhiBelum ada peringkat
- Technical Data For Workover RigsDokumen1 halamanTechnical Data For Workover Rigsloveneshjain100% (1)
- June 2014 Question Paper 22 PDFDokumen8 halamanJune 2014 Question Paper 22 PDFelafBelum ada peringkat