Anda mungkin juga menyukai
- Anchor Bolt Checking ProtocolDokumen4 halamanAnchor Bolt Checking ProtocolpremsubhaBelum ada peringkat
- Mulberry Snags Updated As On 24.1.17Dokumen32 halamanMulberry Snags Updated As On 24.1.17premsubhaBelum ada peringkat
- Kirby Tech Handbook 25 4 20121 402 PDFDokumen305 halamanKirby Tech Handbook 25 4 20121 402 PDFpremsubhaBelum ada peringkat
- SM Des 11 Az PDFDokumen12 halamanSM Des 11 Az PDFpremsubhaBelum ada peringkat
- Canada Civil Engineering Syllabus PDFDokumen13 halamanCanada Civil Engineering Syllabus PDFpremsubha100% (1)
- Reservoirs: Balancing Supply and DemandDokumen34 halamanReservoirs: Balancing Supply and DemandpremsubhaBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Everest Full Synthetic Motor OilDokumen1 halamanEverest Full Synthetic Motor OilLa YaungBelum ada peringkat
- Corrosion Fatigue PDFDokumen2 halamanCorrosion Fatigue PDFvelu111Belum ada peringkat
- Eaton Lubricant Suppliers TCMT0020 EN-US: Lubrication GuideDokumen13 halamanEaton Lubricant Suppliers TCMT0020 EN-US: Lubrication Guideluis_dominguezeBelum ada peringkat
- Steering Pump For TruckDokumen32 halamanSteering Pump For TruckJavier Rojas Francia100% (2)
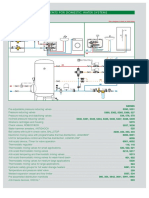
- Components For Domestic Water Systems: This Diagram Is Just An IndicationDokumen22 halamanComponents For Domestic Water Systems: This Diagram Is Just An Indicationravi00098Belum ada peringkat
- Clearance Study For Tunnel (Udhampur - Katra Section)Dokumen7 halamanClearance Study For Tunnel (Udhampur - Katra Section)Anubhav Hem Kumar JainBelum ada peringkat
- Zyc120bs GB1Dokumen32 halamanZyc120bs GB1Mel ErphandBelum ada peringkat
- 4 Way Hacksaw MachineDokumen8 halaman4 Way Hacksaw Machinepandi67% (3)
- Motor de VaporDokumen75 halamanMotor de VaporEduardo GarciaBelum ada peringkat
- Instruction Manual Shinva 45litre Autoclave240V With PrinterDokumen21 halamanInstruction Manual Shinva 45litre Autoclave240V With PrinterEnfant Perdu100% (3)
- Geotechnical FormulasDokumen15 halamanGeotechnical FormulasDavid King100% (1)
- MEI Company Profile PDFDokumen9 halamanMEI Company Profile PDFWilliam J JBelum ada peringkat
- JMEUT Volume 50 Issue 4 Pages 45-49Dokumen5 halamanJMEUT Volume 50 Issue 4 Pages 45-49Behi GhBelum ada peringkat
- EP-300 Operating Manual E1Dokumen343 halamanEP-300 Operating Manual E1leman quliyevaBelum ada peringkat
- Date Sheet: The Punjab State Board of Technical Education & Industrial TrainingDokumen40 halamanDate Sheet: The Punjab State Board of Technical Education & Industrial TrainingInderBelum ada peringkat
- Mech Engg Curriculum According To HecDokumen92 halamanMech Engg Curriculum According To HecRameez AnwarBelum ada peringkat
- Fire Protection Design GuidelinesDokumen11 halamanFire Protection Design GuidelinesMarck Gheson InacayBelum ada peringkat
- 920 01 641 ImpellerOverview 08.03.2017 WebDokumen1 halaman920 01 641 ImpellerOverview 08.03.2017 Websaroat moongwattanaBelum ada peringkat
- Water Jet and Abrasive Water Jet MachiningDokumen38 halamanWater Jet and Abrasive Water Jet MachiningEthan HuntBelum ada peringkat
- Teaching Modules For Steel Instruction: Advanced Flexure Design Composite Beam Theory SlidesDokumen27 halamanTeaching Modules For Steel Instruction: Advanced Flexure Design Composite Beam Theory SlideskiranBelum ada peringkat
- Turolla Hydraulic Gear Pumps Group2 Catalogue en l1016341Dokumen44 halamanTurolla Hydraulic Gear Pumps Group2 Catalogue en l1016341Opened EyesBelum ada peringkat
- Daf Brochure xf105 PowerDokumen6 halamanDaf Brochure xf105 PowerНедељко АнђелићBelum ada peringkat
- Budhu Soil Mechanics Foundations 3rd TXTBKDokumen1 halamanBudhu Soil Mechanics Foundations 3rd TXTBKNadeem AbbasiBelum ada peringkat
- Spe 36761 MSDokumen13 halamanSpe 36761 MSKarla CotesBelum ada peringkat
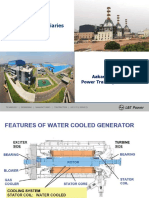
- Generator AuxiliariesDokumen39 halamanGenerator Auxiliariesharry2586Belum ada peringkat
- Rheology of Complex FluidsDokumen130 halamanRheology of Complex FluidsghfdlfBelum ada peringkat
- KTG ThermodynamicsDokumen36 halamanKTG ThermodynamicsSatyajit ManeBelum ada peringkat
- LR Mate 200id Series - 187Dokumen2 halamanLR Mate 200id Series - 187Kevin ScogginsBelum ada peringkat
- Outdoor UnitsDokumen47 halamanOutdoor UnitsSayeed AnwarBelum ada peringkat
- Mise en Forme Par Déformation Plastique 1 Special Processes of Forming TechnologyDokumen16 halamanMise en Forme Par Déformation Plastique 1 Special Processes of Forming TechnologyYessine OmraneBelum ada peringkat