Anda mungkin juga menyukai
- Elasticidad. Teoría y ejercicios prácticos resueltosDari EverandElasticidad. Teoría y ejercicios prácticos resueltosBelum ada peringkat
- Segundo Trabajo de Sismos - InformeDokumen13 halamanSegundo Trabajo de Sismos - InformemanuelBelum ada peringkat
- Undrained seismic response of underground structuresDari EverandUndrained seismic response of underground structuresBelum ada peringkat
- Ex Parcial 2015 - SoluciónDokumen5 halamanEx Parcial 2015 - SoluciónDiegoBelum ada peringkat
- Análisis sísmico edificio oficinas PiuraDokumen20 halamanAnálisis sísmico edificio oficinas PiuraJorgeRiveraBelum ada peringkat
- Linea de Saturacion 2do CJDokumen2 halamanLinea de Saturacion 2do CJCristian RamosBelum ada peringkat
- Diseño hidráulico bocatoma canalDokumen15 halamanDiseño hidráulico bocatoma canalJuan Guillermo Díaz MontenegroBelum ada peringkat
- Experimentos Laboratorio Hidráulico PDFDokumen3 halamanExperimentos Laboratorio Hidráulico PDFmaximo novaBelum ada peringkat
- Especialización ETABS 2015 & SAFE 2014 PDFDokumen97 halamanEspecialización ETABS 2015 & SAFE 2014 PDFSergio RoqueBelum ada peringkat
- Patologia en Diseño y Construcion de PuentesDokumen15 halamanPatologia en Diseño y Construcion de PuentesAngela MorinBelum ada peringkat
- Universidad Mayor Real Y Pontificia de San Francisco Xavier de ChuquisacaDokumen27 halamanUniversidad Mayor Real Y Pontificia de San Francisco Xavier de ChuquisacaJoelBelum ada peringkat
- Analisis Sismico EstaticoDokumen23 halamanAnalisis Sismico EstaticoVictor Rene H. R.100% (1)
- Predimensionamiento de v. Madera e Inst. para Usar El ExcelDokumen8 halamanPredimensionamiento de v. Madera e Inst. para Usar El Excelmecanico_FEMBelum ada peringkat
- Sistemas de Control para La Protección de Estructuras Civiles Sometidas A Cargas DinámicasDokumen19 halamanSistemas de Control para La Protección de Estructuras Civiles Sometidas A Cargas DinámicasJose Carlos GüemesBelum ada peringkat
- Falla en Columnas Grupo 1 y 2Dokumen18 halamanFalla en Columnas Grupo 1 y 2Meraki NeBelum ada peringkat
- Norma Nec 15Dokumen7 halamanNorma Nec 15AlexDarioBelum ada peringkat
- Diseño elementos concretoDokumen12 halamanDiseño elementos concretoArliintOn Edwin Cuyán BarbozaBelum ada peringkat
- Puente pórtico de concretoDokumen6 halamanPuente pórtico de concretoJaime Samir Ramirez PizarroBelum ada peringkat
- Precipitacion en Venezuela PDFDokumen5 halamanPrecipitacion en Venezuela PDFRomelis Farreras CondalesBelum ada peringkat
- Analisis DinamicoDokumen10 halamanAnalisis DinamicoWalter Eduardo Loayza ChambillaBelum ada peringkat
- Analisis de Esfuerzos en Una Presa de Gravedad PDFDokumen32 halamanAnalisis de Esfuerzos en Una Presa de Gravedad PDFVictor Manuel Chacana ColihuincaBelum ada peringkat
- Análisis pluviométricos y estimación de caudales máximosDokumen18 halamanAnálisis pluviométricos y estimación de caudales máximosLenhart Vampyyri Ja KorppiBelum ada peringkat
- Análisis Estático y Sísmico 3 PisosDokumen62 halamanAnálisis Estático y Sísmico 3 PisosVictoriaBelum ada peringkat
- Presentacion HidrogeologiaDokumen25 halamanPresentacion HidrogeologiaEdgar Gavidia0% (1)
- Problema 2Dokumen5 halamanProblema 2Elizabeth Roque RamosBelum ada peringkat
- Curva PushoverDokumen5 halamanCurva PushoverDiego Fernando LlanquiBelum ada peringkat
- Analisis Modal de Las EstructurasDokumen15 halamanAnalisis Modal de Las EstructurasEdison Ricardo Cedeño Ripalda100% (1)
- Sismología e Ingeniería SismológicaDokumen7 halamanSismología e Ingeniería SismológicaCharlesSonccoCutyBelum ada peringkat
- Transp de Sedimentos 05Dokumen22 halamanTransp de Sedimentos 05Ryo keller -EdgarBelum ada peringkat
- Metodo Estatico y Dinamico para El Analisis SismicoDokumen8 halamanMetodo Estatico y Dinamico para El Analisis Sismicojavier roque fabiaBelum ada peringkat
- Analisis Sismico Dinamico Espectral de Edificaciones Aporticadas Normas NECDokumen41 halamanAnalisis Sismico Dinamico Espectral de Edificaciones Aporticadas Normas NECMiguel TisalemaBelum ada peringkat
- Espectros de RespuestaDokumen23 halamanEspectros de RespuestaMilca PalacinBelum ada peringkat
- Coeficientes de Irregularidad en PlantaDokumen4 halamanCoeficientes de Irregularidad en Plantaeddyson1095Belum ada peringkat
- Comparacion de La Norma E.030 2009 - 2016Dokumen36 halamanComparacion de La Norma E.030 2009 - 2016Lex Tito Cardenas Saldaña57% (7)
- Puentes LosaDokumen24 halamanPuentes LosaManuel J. GoBelum ada peringkat
- Diseño sísmico de diafragmas en edificios de concretoDokumen38 halamanDiseño sísmico de diafragmas en edificios de concretoMarlon guevara fernandezBelum ada peringkat
- Análisis sísmico mediante métodos estáticos y dinámicosDokumen15 halamanAnálisis sísmico mediante métodos estáticos y dinámicosDianis MedinaBelum ada peringkat
- Cálculo de caudal en tubería circularDokumen3 halamanCálculo de caudal en tubería circularMirla QuispeBelum ada peringkat
- Trabajo I - Evolución de La Norma E030Dokumen24 halamanTrabajo I - Evolución de La Norma E030Carlos Cesar Delgado BravoBelum ada peringkat
- Revision de La Norma E.030 Diseño Sismorresistente Final 2Dokumen70 halamanRevision de La Norma E.030 Diseño Sismorresistente Final 2Gabriel GabrieBelum ada peringkat
- Ejemplo de Analisis Sismico Estatico de Un Edificio PDFDokumen19 halamanEjemplo de Analisis Sismico Estatico de Un Edificio PDFLuis Paxi100% (1)
- Análisis de Riesgo del Sistema de Riego Erquiz Fase IDokumen29 halamanAnálisis de Riesgo del Sistema de Riego Erquiz Fase Iadali sorucoBelum ada peringkat
- Analisis Sismico Rectangulares PDFDokumen8 halamanAnalisis Sismico Rectangulares PDFDarío Vasconcelos Martínez100% (1)
- Calculo VientoDokumen23 halamanCalculo Vientoferdyabejar100% (1)
- Documento Aislamiento de BaseDokumen41 halamanDocumento Aislamiento de BaseRafael Chora LauraBelum ada peringkat
- Losas 5 Losas Sin VigasDokumen63 halamanLosas 5 Losas Sin VigasGustavo RuizBelum ada peringkat
- Diseño Geometria PresaDokumen13 halamanDiseño Geometria PresaWifama Fajardo MamaniBelum ada peringkat
- Memoria Estructural de BoxcoulvertDokumen13 halamanMemoria Estructural de Boxcoulvertchma324Belum ada peringkat
- Analisis Sismico EstáticoDokumen8 halamanAnalisis Sismico EstáticoZym Zuñiga Morales Contratistas GeneralesBelum ada peringkat
- Tarea 2 PuentesDokumen18 halamanTarea 2 PuentesAbrahan UgarteBelum ada peringkat
- 04 Espectro de Respuesta SísmicaDokumen13 halaman04 Espectro de Respuesta SísmicaKevin Arnold Palacios MezaBelum ada peringkat
- Sismo Estudio de MovimientoDokumen50 halamanSismo Estudio de MovimientoSteven VásconezBelum ada peringkat
- INFORME TÉCNICO ARCHIVO REGIONAL AYACUCHODokumen32 halamanINFORME TÉCNICO ARCHIVO REGIONAL AYACUCHOMario Huayhua BerrocalBelum ada peringkat
- Cálculo de capacidad portante de cimentacionesDokumen13 halamanCálculo de capacidad portante de cimentacionesLander Exequiel Gonzales PeñaBelum ada peringkat
- Lectura Semana 4Dokumen10 halamanLectura Semana 4dawilber gamarraBelum ada peringkat
- Menú Principal: Estructuras Sismoresistentes. Analisis Modal Espectral. Capítulo 2Dokumen11 halamanMenú Principal: Estructuras Sismoresistentes. Analisis Modal Espectral. Capítulo 2Rildo Kenyi Apaza TitoBelum ada peringkat
- Ingeniería Antisísmica UNMSM: Práctica Calificada N°01Dokumen21 halamanIngeniería Antisísmica UNMSM: Práctica Calificada N°01RolandAvilaJulcaBelum ada peringkat
- Nuevas Tecnicas en El Diseño de EdificiosDokumen38 halamanNuevas Tecnicas en El Diseño de EdificiosJavier ChirinosBelum ada peringkat
- 3 - Acciones SísmicasDokumen19 halaman3 - Acciones Sísmicassilvina.oliva13Belum ada peringkat
- Antisismica - Ayacucho - Presentacion - Taipe Miranda Jose Rodolfo - 2015219844Dokumen22 halamanAntisismica - Ayacucho - Presentacion - Taipe Miranda Jose Rodolfo - 2015219844JOSE RODOLFO TAIPE MIRANDABelum ada peringkat
- Uso de Las Tics en Edad Preescolar 1Dokumen4 halamanUso de Las Tics en Edad Preescolar 1Jonathan Arce RomeroBelum ada peringkat
- 2018 Cerro Colorado-UbicacionDokumen1 halaman2018 Cerro Colorado-UbicacionJonathan Arce RomeroBelum ada peringkat
- Obras PreliminaresDokumen36 halamanObras PreliminaresJonathan Arce RomeroBelum ada peringkat
- Estudio de SuelosDokumen2 halamanEstudio de SuelosJonathan Arce RomeroBelum ada peringkat
- Exp. Tec. Plan de Manejo Ambiental Villa IngenieriaDokumen82 halamanExp. Tec. Plan de Manejo Ambiental Villa IngenieriaJonathan Arce Romero100% (1)
- Diseño de MezclasDokumen4 halamanDiseño de MezclasJonathan Arce RomeroBelum ada peringkat
- Tarea de FluidosDokumen5 halamanTarea de FluidosJonathan Arce RomeroBelum ada peringkat
- Estos Son Nuestros DerechosDokumen4 halamanEstos Son Nuestros DerechosJonathan Arce RomeroBelum ada peringkat
- Zapata AisladaDokumen6 halamanZapata AisladaJIMMY_3788Belum ada peringkat
- Mitigacion AmbientalDokumen2 halamanMitigacion AmbientalJonathan Arce RomeroBelum ada peringkat
- Manual Programacion de ObrasDokumen6 halamanManual Programacion de ObrasCesar DCBelum ada peringkat
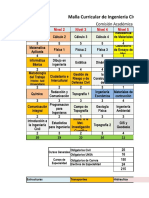
- Malla Curricular IC UNSA 2016 REV 0 27 Sep2016aDokumen131 halamanMalla Curricular IC UNSA 2016 REV 0 27 Sep2016aJonathan Arce RomeroBelum ada peringkat
- Evaluación del potencial de licuación de suelos en ChimboteDokumen15 halamanEvaluación del potencial de licuación de suelos en ChimboteWilson Izaguirre MinayaBelum ada peringkat
- Capacidad Portante de SuelosDokumen25 halamanCapacidad Portante de SuelosYury Carrion Umeres50% (2)
- Pliego Especificaciones TecnicasDokumen41 halamanPliego Especificaciones TecnicasEl AcertijoBelum ada peringkat
- 01 Sandoval Oyarzun q11 PDFDokumen13 halaman01 Sandoval Oyarzun q11 PDFJonathan Arce RomeroBelum ada peringkat
- Reglamento Nacional de Edificaciones 2010-1Dokumen5 halamanReglamento Nacional de Edificaciones 2010-1Albert Campos HilasBelum ada peringkat
- FrescoDokumen21 halamanFrescoPiter Marcelo GondraBelum ada peringkat
- RNEDokumen400 halamanRNEDayDreaminBelum ada peringkat
- Fundamentos Centrales HidroeléctricasDokumen34 halamanFundamentos Centrales HidroeléctricasOscar Andres Contreras CastilloBelum ada peringkat
- Catálogo Técnico OndulineDokumen28 halamanCatálogo Técnico OndulineLiz Pariona AriasBelum ada peringkat
- ZapatasDokumen182 halamanZapatasJeff Salinas ArcosBelum ada peringkat
- ZapatasDokumen182 halamanZapatasJeff Salinas ArcosBelum ada peringkat
- Catálogo Técnico OndulineDokumen28 halamanCatálogo Técnico OndulineLiz Pariona AriasBelum ada peringkat
- Techado OficinasDokumen99 halamanTechado OficinasEriber Washington Enciso NavarroBelum ada peringkat
- Fundamentos Centrales HidroeléctricasDokumen34 halamanFundamentos Centrales HidroeléctricasOscar Andres Contreras CastilloBelum ada peringkat
- Techado OficinasDokumen99 halamanTechado OficinasEriber Washington Enciso NavarroBelum ada peringkat
- Catálogo Técnico OndulineDokumen28 halamanCatálogo Técnico OndulineLiz Pariona AriasBelum ada peringkat
- Techado OficinasDokumen99 halamanTechado OficinasEriber Washington Enciso NavarroBelum ada peringkat
- Taller de Español 1Dokumen21 halamanTaller de Español 1Tania manzanoBelum ada peringkat
- Competencia: Capacidad: Desempeño PrecisadoDokumen9 halamanCompetencia: Capacidad: Desempeño PrecisadovbnjdhgfdfghBelum ada peringkat
- EPPseguridadDokumen7 halamanEPPseguridadGabriela MataBelum ada peringkat
- Módulo IV Apéndice 1 - Investigación e InteligenciaDokumen17 halamanMódulo IV Apéndice 1 - Investigación e InteligenciaccentroaméricaBelum ada peringkat
- Significación y Relación Publicitaria - 13 FebDokumen26 halamanSignificación y Relación Publicitaria - 13 FebLmolina AlfaroBelum ada peringkat
- RamosNaravez MarthaLeticia M2S1AI1Dokumen6 halamanRamosNaravez MarthaLeticia M2S1AI1Martha Leticia Ramos NarvaezBelum ada peringkat
- Eyal WeizmanDokumen9 halamanEyal WeizmanYelitza Xiomara Altamirano EstebanBelum ada peringkat
- Calvino CulturaDokumen27 halamanCalvino CulturaJouberto HeringerBelum ada peringkat
- Manual Estudiante Enf 805 Versión 2017Dokumen67 halamanManual Estudiante Enf 805 Versión 2017Natalia Andrea Opazo Eberl100% (1)
- Irresponsabilidad en Las Redes SocialesDokumen2 halamanIrresponsabilidad en Las Redes SocialesSarahi GonzalezBelum ada peringkat
- Formato Informe PrácticaDokumen4 halamanFormato Informe PrácticaDaniel GarridoBelum ada peringkat
- Cuaderno de Informes - Mecanica Aplicada - Poleas - Maquina Cepilladora - N 3Dokumen14 halamanCuaderno de Informes - Mecanica Aplicada - Poleas - Maquina Cepilladora - N 3Jkjvj ArelyBelum ada peringkat
- Caso de Éxito Grupo NutresaDokumen4 halamanCaso de Éxito Grupo NutresaGilberto GalindoBelum ada peringkat
- Internacional Situacionista - Sobre La Miseria en El Medio Estudiantil (Media Carta - Lectura)Dokumen28 halamanInternacional Situacionista - Sobre La Miseria en El Medio Estudiantil (Media Carta - Lectura)Alguien AnonimoBelum ada peringkat
- Muestreo UCSSDokumen27 halamanMuestreo UCSScristinaBelum ada peringkat
- Castigat Ridendo MoresDokumen12 halamanCastigat Ridendo MoresDesiluetas ViernesBelum ada peringkat
- Resumen Capitulo 1 y 2 CengelDokumen3 halamanResumen Capitulo 1 y 2 CengelHerald LopezBelum ada peringkat
- Cortsetal 2012Dokumen433 halamanCortsetal 2012MAGICAN MÉXICOBelum ada peringkat
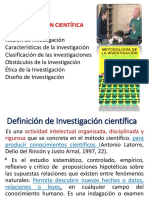
- Investigación científicaDokumen15 halamanInvestigación científicaCarmen Maria SolisBelum ada peringkat
- Mb02 - Silabo de Matematica Basica IIDokumen0 halamanMb02 - Silabo de Matematica Basica IIdavid_th8008Belum ada peringkat
- Alta Tensión Unidad 1 PDFDokumen27 halamanAlta Tensión Unidad 1 PDFAngelica Lisette Bueno OjedaBelum ada peringkat
- Catálogo de actividades PROADokumen300 halamanCatálogo de actividades PROALara GonzalezBelum ada peringkat
- Transformaciones LinealesDokumen5 halamanTransformaciones LinealesNorbis OzBelum ada peringkat
- Ficha de Asesoría Fin de CarreraDokumen1 halamanFicha de Asesoría Fin de CarreraAntonioBelum ada peringkat
- Reglas Del IyawoDokumen24 halamanReglas Del IyawoDylan Cárdenas100% (1)
- Formato Evidenciando Mi Aprendizaje U3Dokumen4 halamanFormato Evidenciando Mi Aprendizaje U3EstefaPerezBelum ada peringkat
- Tema I Analisis Matematico IIDokumen10 halamanTema I Analisis Matematico IIXavier GarcíaBelum ada peringkat
- TrombaDokumen679 halamanTrombaLiseth Fresneda100% (2)
- Trabajo DavidDokumen9 halamanTrabajo DavidYomira Morales RiosBelum ada peringkat
- Unit 4Dokumen10 halamanUnit 4Iñaki MurBelum ada peringkat