Anda mungkin juga menyukai
- State Machine Pseudo CodeDokumen2 halamanState Machine Pseudo Codeapi-340729449100% (1)
- WheelDokumen1 halamanWheelapi-272563993Belum ada peringkat
- Documentation Pull LineDokumen6 halamanDocumentation Pull Linejacerosiete2952Belum ada peringkat
- Actionmachine CDokumen6 halamanActionmachine Capi-272643960Belum ada peringkat
- "ES - Configure.h" "ES - Framework.h" "Car.h" "PWM16Tiva.h" "Inc/hw - Memmap.h" "Inc/hw - Types.h" "Inc/hw - Gpio.h" "Inc/hw - Sysctl.h"Dokumen10 halaman"ES - Configure.h" "ES - Framework.h" "Car.h" "PWM16Tiva.h" "Inc/hw - Memmap.h" "Inc/hw - Types.h" "Inc/hw - Gpio.h" "Inc/hw - Sysctl.h"api-385142684Belum ada peringkat
- FaceoffnavDokumen7 halamanFaceoffnavapi-398062839Belum ada peringkat
- UnloadrecyclingDokumen11 halamanUnloadrecyclingapi-438120791Belum ada peringkat
- Encoder Service State MachineDokumen1 halamanEncoder Service State Machineapi-350941923Belum ada peringkat
- Reloading SMDokumen10 halamanReloading SMapi-397509789Belum ada peringkat
- MotorserviceDokumen8 halamanMotorserviceapi-397509789Belum ada peringkat
- Car CDokumen5 halamanCar Capi-385142684Belum ada peringkat
- NavtoshootreloadsmDokumen4 halamanNavtoshootreloadsmapi-398062839Belum ada peringkat
- Gameplay HSM Pseudo CodeDokumen4 halamanGameplay HSM Pseudo Codeapi-644185248Belum ada peringkat
- Location CDokumen13 halamanLocation Capi-272643960Belum ada peringkat
- Linefollowing SMDokumen9 halamanLinefollowing SMapi-397509789Belum ada peringkat
- DefensesmDokumen6 halamanDefensesmapi-397492879Belum ada peringkat
- TeramotorserviceDokumen4 halamanTeramotorserviceapi-384495602Belum ada peringkat
- Pesudo CodeDokumen22 halamanPesudo Codeapi-311007633Belum ada peringkat
- UnloadtrashDokumen10 halamanUnloadtrashapi-438120791Belum ada peringkat
- DefenseDokumen6 halamanDefenseapi-398062839Belum ada peringkat
- ShootingcDokumen7 halamanShootingcapi-397509789Belum ada peringkat
- PlayserviceDokumen14 halamanPlayserviceapi-397509789Belum ada peringkat
- LeafsmDokumen7 halamanLeafsmapi-438010548Belum ada peringkat
- Timingmotor FinalDokumen2 halamanTimingmotor Finalapi-340769184Belum ada peringkat
- "ES - Configure.h" "ES - Framework.h" "ZENER.h" "Inputs.h" "OPAMP.h"Dokumen9 halaman"ES - Configure.h" "ES - Framework.h" "ZENER.h" "Inputs.h" "OPAMP.h"api-552271981Belum ada peringkat
- ShootingsmDokumen6 halamanShootingsmapi-398062839Belum ada peringkat
- OffensesmDokumen11 halamanOffensesmapi-397492879Belum ada peringkat
- Scenesm CDokumen6 halamanScenesm Capi-340729449Belum ada peringkat
- LeafsmDokumen2 halamanLeafsmapi-438010548Belum ada peringkat
- FaceoffsmDokumen16 halamanFaceoffsmapi-397492879Belum ada peringkat
- ReloadstatemachineDokumen7 halamanReloadstatemachineapi-398062839100% (1)
- GamehsmDokumen9 halamanGamehsmapi-438120791Belum ada peringkat
- TrexDokumen5 halamanTrexapi-385142684Belum ada peringkat
- LinefollowingsmDokumen8 halamanLinefollowingsmapi-398062839Belum ada peringkat
- "ES - Configure.h" "ES - Framework.h" "TVS.H" "Inputs.h" "UART.h" "OPAMP.h"Dokumen6 halaman"ES - Configure.h" "ES - Framework.h" "TVS.H" "Inputs.h" "UART.h" "OPAMP.h"api-552271981Belum ada peringkat
- Shooting PseudocodeDokumen4 halamanShooting Pseudocodeapi-581263110Belum ada peringkat
- RefcommsmDokumen9 halamanRefcommsmapi-397492879Belum ada peringkat
- FanserviceDokumen4 halamanFanserviceapi-384495602Belum ada peringkat
- InreposmDokumen4 halamanInreposmapi-644185248Belum ada peringkat
- Orca Share Media1708236207764 7164861959171823072Dokumen4 halamanOrca Share Media1708236207764 7164861959171823072qhasabueroBelum ada peringkat
- PopupmotorserviceDokumen4 halamanPopupmotorserviceapi-384495602Belum ada peringkat
- "Es - Configure.H" "Es - Framework.H" "Timingmotor.H" "Pwm10Tiva.H" "Bitdefs.H" "Definitions.H"Dokumen5 halaman"Es - Configure.H" "Es - Framework.H" "Timingmotor.H" "Pwm10Tiva.H" "Bitdefs.H" "Definitions.H"api-340769184Belum ada peringkat
- GamemastersmDokumen12 halamanGamemastersmapi-397492879Belum ada peringkat
- RefserviceDokumen10 halamanRefserviceapi-397509789Belum ada peringkat
- VisualblastsmDokumen5 halamanVisualblastsmapi-438010548Belum ada peringkat
- Drs CDokumen10 halamanDrs Capi-272643960Belum ada peringkat
- IdleDokumen2 halamanIdleapi-385142684Belum ada peringkat
- EventcheckersDokumen4 halamanEventcheckersapi-438010548Belum ada peringkat
- 1 Controlservice: Pseudo-Code For The Controlservice ModuleDokumen2 halaman1 Controlservice: Pseudo-Code For The Controlservice Moduleapi-360044869Belum ada peringkat
- PseudoturntableDokumen2 halamanPseudoturntableapi-437846864Belum ada peringkat
- GameplaycDokumen5 halamanGameplaycapi-397509789Belum ada peringkat
- ResetsmDokumen2 halamanResetsmapi-438010548Belum ada peringkat
- Ballshooting CDokumen7 halamanBallshooting Capi-272643960Belum ada peringkat
- EV3 Motor GuidefdDokumen6 halamanEV3 Motor GuidefdBob LobbyBelum ada peringkat
- Behavior-Based Programming: Import Public Class ImplementsDokumen8 halamanBehavior-Based Programming: Import Public Class ImplementsMatt SennettBelum ada peringkat
- Event Checkers CodeDokumen6 halamanEvent Checkers Codeapi-272643960Belum ada peringkat
- TimeDokumen9 halamanTimeapi-385142684Belum ada peringkat
- React Dom Unstable Native Dependencies - DevelopmentDokumen29 halamanReact Dom Unstable Native Dependencies - DevelopmentpankerbestBelum ada peringkat
- Scene DelegateDokumen1 halamanScene DelegateTygruletzBelum ada peringkat
- Me 218 CgemsofwisdomDokumen4 halamanMe 218 Cgemsofwisdomapi-340729449Belum ada peringkat
- Final BomDokumen2 halamanFinal Bomapi-340729449Belum ada peringkat
- Final BomDokumen2 halamanFinal Bomapi-340729449Belum ada peringkat
- Audio HfileDokumen1 halamanAudio Hfileapi-340729449Belum ada peringkat
- Sensewind CfileDokumen3 halamanSensewind Cfileapi-340729449Belum ada peringkat
- Ian SchemDokumen5 halamanIan Schemapi-340729449Belum ada peringkat
- Sensewind HfileDokumen1 halamanSensewind Hfileapi-340729449Belum ada peringkat
- Plantserviceandcheckers CDokumen10 halamanPlantserviceandcheckers Capi-340729449Belum ada peringkat
- Lightsservice HDokumen1 halamanLightsservice Hapi-340729449Belum ada peringkat
- Weatherservice HDokumen1 halamanWeatherservice Hapi-340729449Belum ada peringkat
- Shift Register Pseudo CodeDokumen1 halamanShift Register Pseudo Codeapi-340729449Belum ada peringkat
- Rangefinder CDokumen1 halamanRangefinder Capi-340729449Belum ada peringkat
- Buttondebounce HDokumen1 halamanButtondebounce Hapi-340729449Belum ada peringkat
- Servo HDokumen1 halamanServo Hapi-340729449Belum ada peringkat
- Motorservice HDokumen1 halamanMotorservice Hapi-340729449Belum ada peringkat
- Servo CDokumen2 halamanServo Capi-340729449Belum ada peringkat
- Curtaindebounce HDokumen1 halamanCurtaindebounce Hapi-340729449Belum ada peringkat
- Shiftregister CDokumen2 halamanShiftregister Capi-340729449Belum ada peringkat
- Servoservice HDokumen1 halamanServoservice Hapi-340729449Belum ada peringkat
- Mathematics4 q4 Week4 v4Dokumen11 halamanMathematics4 q4 Week4 v4Morales JinxBelum ada peringkat
- Norberto Elias: Graduation of Teach Portuguese Language With Ability in EnglishDokumen14 halamanNorberto Elias: Graduation of Teach Portuguese Language With Ability in EnglishGildo Joaquim FranciscoBelum ada peringkat
- Tekla SoakwayDokumen2 halamanTekla SoakwayBalaji Naik100% (1)
- Harriet Tubman Lesson PlanDokumen7 halamanHarriet Tubman Lesson PlanuarkgradstudentBelum ada peringkat
- Unit 3Dokumen5 halamanUnit 3Narasimman DonBelum ada peringkat
- Piaggio MP3 300 Ibrido LT MY 2010 (En)Dokumen412 halamanPiaggio MP3 300 Ibrido LT MY 2010 (En)Manualles100% (3)
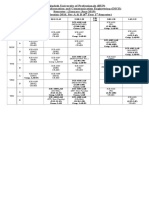
- Class Routine Final 13.12.18Dokumen7 halamanClass Routine Final 13.12.18RakibBelum ada peringkat
- Evidence MODULE 1 Evidence DefinitionDokumen8 halamanEvidence MODULE 1 Evidence Definitiondave BarretoBelum ada peringkat
- Skirmishes Graham Harman PDFDokumen383 halamanSkirmishes Graham Harman PDFparaiaBelum ada peringkat
- NCRA Membership InformationDokumen1 halamanNCRA Membership Informationbkharkreader1301Belum ada peringkat
- LQZLQM ) So"L/L6H Klans LN : Sfof (No K - Of) HGSF) Nflu DFQDokumen5 halamanLQZLQM ) So"L/L6H Klans LN : Sfof (No K - Of) HGSF) Nflu DFQSAJAL KOIRALABelum ada peringkat
- Human Development and Performance Throughout The Lifespan 2nd Edition Cronin Mandich Test BankDokumen4 halamanHuman Development and Performance Throughout The Lifespan 2nd Edition Cronin Mandich Test Bankanne100% (28)
- Changing Sentences in The Simple Present Tense Into PassiveDokumen4 halamanChanging Sentences in The Simple Present Tense Into PassiveBernadette NarteBelum ada peringkat
- TR60 RIGID ENG. 6/13/03 10:38 AM Page 1: Performance DataDokumen2 halamanTR60 RIGID ENG. 6/13/03 10:38 AM Page 1: Performance Databayu enasoraBelum ada peringkat
- Group 4 - When Technology and Humanity CrossDokumen32 halamanGroup 4 - When Technology and Humanity CrossJaen NajarBelum ada peringkat
- Philips HD 9 User ManualDokumen3 halamanPhilips HD 9 User ManualNdangoh DerekBelum ada peringkat
- National Pension System (NPS) - Subscriber Registration FormDokumen3 halamanNational Pension System (NPS) - Subscriber Registration FormPratikJagtapBelum ada peringkat
- AMiT Products Solutions 2022 1 En-SmallDokumen60 halamanAMiT Products Solutions 2022 1 En-SmallMikhailBelum ada peringkat
- FPGA Implementation For Humidity and Temperature Remote Sensing SystemDokumen5 halamanFPGA Implementation For Humidity and Temperature Remote Sensing SystemteekamBelum ada peringkat
- Matsusada DC-DC ConvertersDokumen4 halamanMatsusada DC-DC ConvertersAP SinghBelum ada peringkat
- Hydrology Report at CH-9+491Dokumen3 halamanHydrology Report at CH-9+491juliyet strucBelum ada peringkat
- Manish Kumar: Desire To Work and Grow in The Field of MechanicalDokumen4 halamanManish Kumar: Desire To Work and Grow in The Field of MechanicalMANISHBelum ada peringkat
- Bosch KE-Jetronic System DescriptionDokumen3 halamanBosch KE-Jetronic System DescriptionJack Tang50% (2)
- Research Project Presentation of Jobairul Karim ArmanDokumen17 halamanResearch Project Presentation of Jobairul Karim ArmanJobairul Karim ArmanBelum ada peringkat
- Analysis Chart - Julie Taymor-ArticleDokumen3 halamanAnalysis Chart - Julie Taymor-ArticlePATRICIO PALENCIABelum ada peringkat
- QSMT Chapter 1Dokumen5 halamanQSMT Chapter 1Rachelle Mae SalvadorBelum ada peringkat
- Brp-Rotax Chassis Approval FormDokumen3 halamanBrp-Rotax Chassis Approval Formdelta compBelum ada peringkat
- Handbook On National Spectrum Management 2015Dokumen333 halamanHandbook On National Spectrum Management 2015Marisela AlvarezBelum ada peringkat
- 8051 Programs Using Kit: Exp No: Date: Arithmetic Operations Using 8051Dokumen16 halaman8051 Programs Using Kit: Exp No: Date: Arithmetic Operations Using 8051Gajalakshmi AshokBelum ada peringkat
- Solar-range-brochure-all-in-one-Gen 2Dokumen8 halamanSolar-range-brochure-all-in-one-Gen 2sibasish patelBelum ada peringkat