Anda mungkin juga menyukai
- The Ogre Nation of KernDokumen21 halamanThe Ogre Nation of KernCesar Man100% (1)
- The 1902 Model Colt Automatic PistolDokumen10 halamanThe 1902 Model Colt Automatic Pistolblowmeasshole1911Belum ada peringkat
- Dielectric Rod AntennaDokumen38 halamanDielectric Rod AntennaAbhishek BhowmickBelum ada peringkat
- ZKTeco PullSDK Development Guide en V2.0.1 20180111Dokumen38 halamanZKTeco PullSDK Development Guide en V2.0.1 20180111Oscar MontenegroBelum ada peringkat
- Amateur Radio Electronics on Your MobileDari EverandAmateur Radio Electronics on Your MobilePenilaian: 5 dari 5 bintang5/5 (1)
- Ariakan and the Knights of TakhisisDokumen2 halamanAriakan and the Knights of TakhisisCesar ManBelum ada peringkat
- Ariakan and the Knights of TakhisisDokumen2 halamanAriakan and the Knights of TakhisisCesar ManBelum ada peringkat
- WritingEndingsAnchorChart PDFDokumen2 halamanWritingEndingsAnchorChart PDFJANE BALBOSA MOHAMMED100% (1)
- ElvesDokumen3 halamanElvesCesar ManBelum ada peringkat
- ElvesDokumen3 halamanElvesCesar ManBelum ada peringkat
- Mass Media - Laws and JurisprudenceDokumen38 halamanMass Media - Laws and JurisprudenceJustice Hugo67% (3)
- Cambridge Primary Mathematics Games Book With CD-ROM 2 - Public PDFDokumen19 halamanCambridge Primary Mathematics Games Book With CD-ROM 2 - Public PDFking dir50% (2)
- Ultrasonic FormulaDokumen12 halamanUltrasonic FormulaAbdalla Mohamed Abdalla50% (2)
- UT Question and AnswersDokumen11 halamanUT Question and Answersrzajadgs50% (2)
- Design and Performance of High Pressure Blowoff SilencersDokumen8 halamanDesign and Performance of High Pressure Blowoff SilencersBrent100% (1)
- Underwater Channel SimulationDokumen55 halamanUnderwater Channel SimulationPratheek Praveen KumarBelum ada peringkat
- Knights of Solamnia: Profiles of Famous Solamnic KnightsDokumen3 halamanKnights of Solamnia: Profiles of Famous Solamnic KnightsCesar ManBelum ada peringkat
- IPR NOTES, TOPIC - Geographical IndicationDokumen45 halamanIPR NOTES, TOPIC - Geographical IndicationDubey Siddharth75% (4)
- Levi Strauss Inc Vs Clinton ApparelleDokumen3 halamanLevi Strauss Inc Vs Clinton ApparelleDarlene GanubBelum ada peringkat
- Summer Tote BagDokumen15 halamanSummer Tote Bagdaliana0100% (5)
- Ultrasonic/Optical Sensor Precise DistanceDokumen4 halamanUltrasonic/Optical Sensor Precise DistancePonpon KujapyBelum ada peringkat
- Modulator processing improvements for parametric speaker systemsDokumen24 halamanModulator processing improvements for parametric speaker systemsComsa MariusBelum ada peringkat
- Acoustic Levitation of A Large Solid SphereDokumen5 halamanAcoustic Levitation of A Large Solid SpheresathyakandadaBelum ada peringkat
- Sensors: Development of A Space-Charge-Sensing SystemDokumen13 halamanSensors: Development of A Space-Charge-Sensing SystemKojiro HadateBelum ada peringkat
- Two Feed Back - JFS21 - 2005 PDFDokumen12 halamanTwo Feed Back - JFS21 - 2005 PDFHassoun09Belum ada peringkat
- Novel Notch Frequency UWB Antenna with Tunable Band-Notch CharacteristicDokumen12 halamanNovel Notch Frequency UWB Antenna with Tunable Band-Notch CharacteristicPECMURUGANBelum ada peringkat
- Experiment 2 Manual - Speed of Sound PDFDokumen12 halamanExperiment 2 Manual - Speed of Sound PDFs-mohammed_hussein100% (1)
- Ultra-Low-Noise Cavity-Stabilized Microwave Reference Oscillator Using An Air-Dielectric ResonatorDokumen6 halamanUltra-Low-Noise Cavity-Stabilized Microwave Reference Oscillator Using An Air-Dielectric ResonatorwaikyqinBelum ada peringkat
- Underwater Wireless Communication System: Home Search Collections Journals About Contact Us My IopscienceDokumen7 halamanUnderwater Wireless Communication System: Home Search Collections Journals About Contact Us My IopscienceJay SharmaBelum ada peringkat
- K - Sonic LoggingDokumen19 halamanK - Sonic Logginghoho91Belum ada peringkat
- Velocity of sound in air determined using resonance columnDokumen8 halamanVelocity of sound in air determined using resonance columnKaran TejwaniBelum ada peringkat
- Au 733997 B3 PDFDokumen18 halamanAu 733997 B3 PDFlazarosBelum ada peringkat
- Ultrasonic Vortex Flowmeter "Ultra Yewflo-Uyf200": KAWANO Takashi MATSUNAGA Yoshinori ANDOH Tetsuo Yasumatsu AkioDokumen4 halamanUltrasonic Vortex Flowmeter "Ultra Yewflo-Uyf200": KAWANO Takashi MATSUNAGA Yoshinori ANDOH Tetsuo Yasumatsu AkiohendrabudimanBelum ada peringkat
- Choosing An Ultrasonic Sensor For Proximity or Distance Measurement - Part 1 - Acoustic Considerations - Sensors MagazineDokumen8 halamanChoosing An Ultrasonic Sensor For Proximity or Distance Measurement - Part 1 - Acoustic Considerations - Sensors MagazineKhoyrul HudaBelum ada peringkat
- Electro-Acoustic Transducer EfficiencyDokumen5 halamanElectro-Acoustic Transducer Efficiencyd00brightBelum ada peringkat
- 5990 5446enDokumen18 halaman5990 5446enBurgheaua Mihai AlexandruBelum ada peringkat
- Phenomena, Theory and Applications of Near-Field Acoustic LevitationDokumen6 halamanPhenomena, Theory and Applications of Near-Field Acoustic LevitationBert BartBelum ada peringkat
- 1 5 11. UltrasonicDokumen3 halaman1 5 11. UltrasonicPeyang PeyongBelum ada peringkat
- Us 7088830Dokumen9 halamanUs 7088830Thanhha NguyenBelum ada peringkat
- Ultrasonic Transducers With Piezoelectric Polymer Foil: F. HarnischDokumen4 halamanUltrasonic Transducers With Piezoelectric Polymer Foil: F. HarnischAmir JoonBelum ada peringkat
- Chapter 9Dokumen8 halamanChapter 9LTE002Belum ada peringkat
- PhysRevLett 124 171102Dokumen5 halamanPhysRevLett 124 171102Sasa TopicBelum ada peringkat
- Basic Radio Theory (JAA ATPL Theory)Dokumen149 halamanBasic Radio Theory (JAA ATPL Theory)yotadrBelum ada peringkat
- Loessle2020 UAVRotorAcousticEmissionDokumen10 halamanLoessle2020 UAVRotorAcousticEmissionZinou AoBelum ada peringkat
- So RR - R: F KT, and The Portions BC, B'C, Etc., Have The FrequencyDokumen2 halamanSo RR - R: F KT, and The Portions BC, B'C, Etc., Have The Frequencyali_raza117Belum ada peringkat
- Bandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer SystemsDokumen11 halamanBandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer Systemssundari_muraliBelum ada peringkat
- Underwater Acoustics: A Brief IntroductionDokumen15 halamanUnderwater Acoustics: A Brief IntroductionDr. Ir. R. Didin Kusdian, MT.Belum ada peringkat
- Medicion de La Luz FROOMEDokumen16 halamanMedicion de La Luz FROOMEelvert nilton torres farroñanBelum ada peringkat
- Frequency Multiplier Chirper Swept Frequency Multiplication (SFM) CDR - Pdfs-Indexed-620 - 1Dokumen8 halamanFrequency Multiplier Chirper Swept Frequency Multiplication (SFM) CDR - Pdfs-Indexed-620 - 1ibanitescuBelum ada peringkat
- Review1 96Dokumen45 halamanReview1 96Vasya PupkinBelum ada peringkat
- Ultrasonic Distance MeterDokumen27 halamanUltrasonic Distance Meteraashishagarwall100% (2)
- Chapter19pp171 180 PDFDokumen10 halamanChapter19pp171 180 PDFInderMahesh0% (1)
- 1 5 11 PDFDokumen3 halaman1 5 11 PDFAfshaBelum ada peringkat
- Noise Reduction in Ultrasonic Gas Flow MeasurementDokumen9 halamanNoise Reduction in Ultrasonic Gas Flow MeasurementyasminaBelum ada peringkat
- Acoustic Projector Using Directivity ControllableDokumen5 halamanAcoustic Projector Using Directivity ControllableClaudio MirettiBelum ada peringkat
- Acoustic LidarDokumen4 halamanAcoustic LidardrphysicsBelum ada peringkat
- Real time NDE of laser shock processing with acoustic emission sensorDokumen4 halamanReal time NDE of laser shock processing with acoustic emission sensorJean ClaudeBelum ada peringkat
- PHY01Dokumen6 halamanPHY01ben harrisBelum ada peringkat
- Audio-Band Frequency-Dependent Squeezing For Gravitational-Wave DetectorsDokumen7 halamanAudio-Band Frequency-Dependent Squeezing For Gravitational-Wave DetectorsSasa TopicBelum ada peringkat
- Numerical Time-Domain Simulation of Diffusive Ultrasound in ConcreteDokumen6 halamanNumerical Time-Domain Simulation of Diffusive Ultrasound in ConcreteDuílio Ferronatto LeiteBelum ada peringkat
- Power FlowDokumen11 halamanPower FlowKAMELBelum ada peringkat
- 63-No.4-2008 - 04-Svilainis, MotiejunasDokumen5 halaman63-No.4-2008 - 04-Svilainis, MotiejunasriannataBelum ada peringkat
- High-Speed Tunable Photonic Crystal Fiber-Based Femtosecond Soliton Source Without Dispersion Pre-CompensationDokumen8 halamanHigh-Speed Tunable Photonic Crystal Fiber-Based Femtosecond Soliton Source Without Dispersion Pre-CompensationManuel SalazarBelum ada peringkat
- Laser Generated UltrasoundDokumen5 halamanLaser Generated UltrasoundMatthew BallardBelum ada peringkat
- Acoustic Logging Methods and Applications: Understanding Sonic Log Presentation and LimitationsDokumen36 halamanAcoustic Logging Methods and Applications: Understanding Sonic Log Presentation and LimitationsbijupiraBelum ada peringkat
- Optical Determination of Velocity of Sound in LiquidsDokumen4 halamanOptical Determination of Velocity of Sound in LiquidsBogdan Cel MicBelum ada peringkat
- IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency ControlDokumen5 halamanIEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency ControlMostafa AbdelrahmanBelum ada peringkat
- B.SC Electronics D2 P4 (2020) SolutionsDokumen15 halamanB.SC Electronics D2 P4 (2020) SolutionsShubham KeshriBelum ada peringkat
- Computational and Experimental Studies On Aircraft Structural Health Monitoring SystemsDokumen10 halamanComputational and Experimental Studies On Aircraft Structural Health Monitoring Systemsmahesh MBelum ada peringkat
- P. Design and Fabrication of An Ultrasonic Speaker With Thickness Mode Piezoceramic TransducersDokumen6 halamanP. Design and Fabrication of An Ultrasonic Speaker With Thickness Mode Piezoceramic TransducersMaría Campo ValeraBelum ada peringkat
- Exploration and Monitoring of the Continental Shelf Underwater EnvironmentDari EverandExploration and Monitoring of the Continental Shelf Underwater EnvironmentBelum ada peringkat
- Miscellaneous Heroism: Abelaard of NidusDokumen12 halamanMiscellaneous Heroism: Abelaard of NidusCesar ManBelum ada peringkat
- Figuras para Convergencia Dos DeslocDokumen3 halamanFiguras para Convergencia Dos DeslocCesar ManBelum ada peringkat
- Hayward 1997-AirCoupledNDE ConfDokumen9 halamanHayward 1997-AirCoupledNDE ConfCesar ManBelum ada peringkat
- Folder Pagina Induscon - São Paulo - Nov 11th To 14th 2018Dokumen3 halamanFolder Pagina Induscon - São Paulo - Nov 11th To 14th 2018Cesar ManBelum ada peringkat
- Aspect RatioDokumen1 halamanAspect RatioCesar ManBelum ada peringkat
- Miscellaneous Heroism: Abelaard of NidusDokumen12 halamanMiscellaneous Heroism: Abelaard of NidusCesar ManBelum ada peringkat
- Miscellaneous Heroism: Abelaard of NidusDokumen12 halamanMiscellaneous Heroism: Abelaard of NidusCesar ManBelum ada peringkat
- Ogres and Their KinDokumen4 halamanOgres and Their KinCesar ManBelum ada peringkat
- Masters of the Conclave: Corenthas and the First TowerDokumen1 halamanMasters of the Conclave: Corenthas and the First TowerCesar ManBelum ada peringkat
- KenderDokumen2 halamanKenderCesar ManBelum ada peringkat
- Legion of SteelDokumen1 halamanLegion of SteelCesar ManBelum ada peringkat
- Masters of the Conclave: Corenthas and the First TowerDokumen1 halamanMasters of the Conclave: Corenthas and the First TowerCesar ManBelum ada peringkat
- Mankind: AbanasinianDokumen9 halamanMankind: AbanasinianCesar ManBelum ada peringkat
- Sara Dunstan, Founder of The Legion of SteelDokumen1 halamanSara Dunstan, Founder of The Legion of SteelCesar ManBelum ada peringkat
- Knights of The Divine HammerDokumen1 halamanKnights of The Divine HammerCesar ManBelum ada peringkat
- Gallego Juarez 1994Dokumen10 halamanGallego Juarez 1994Cesar ManBelum ada peringkat
- GnomesDokumen1 halamanGnomesCesar ManBelum ada peringkat
- KenderDokumen2 halamanKenderCesar ManBelum ada peringkat
- Gallego-Juárez Et Al. - 2010Dokumen12 halamanGallego-Juárez Et Al. - 2010Cesar ManBelum ada peringkat
- 03 Yaralioglu 02 PDFDokumen4 halaman03 Yaralioglu 02 PDFCesar ManBelum ada peringkat
- 03 Yaralioglu 02 PDFDokumen4 halaman03 Yaralioglu 02 PDFCesar ManBelum ada peringkat
- Genetic Algorithm Optimization of Steel Frame DesignDokumen35 halamanGenetic Algorithm Optimization of Steel Frame DesignCesar ManBelum ada peringkat
- 47435Dokumen23 halaman47435Cesar ManBelum ada peringkat
- CTL430Dokumen11 halamanCTL430Robert XieBelum ada peringkat
- NEWProunoun Agreement Practice IndefiniteDokumen4 halamanNEWProunoun Agreement Practice Indefinitere7abBelum ada peringkat
- Understanding the Complexity of Business in the Arab WorldDokumen2 halamanUnderstanding the Complexity of Business in the Arab WorldAndrea Gural De GuzmanBelum ada peringkat
- Eightcheck-3Wp Assay Sheet: High LevelDokumen5 halamanEightcheck-3Wp Assay Sheet: High LevelLeonard OnsikBelum ada peringkat
- 346-Installing and Maintaining Tubing and Hose SystemsDokumen80 halaman346-Installing and Maintaining Tubing and Hose SystemsatagucaBelum ada peringkat
- Archmodels Vol 132 PDFDokumen27 halamanArchmodels Vol 132 PDFNaassom VazBelum ada peringkat
- RenvoiDokumen17 halamanRenvoiSharif ASBelum ada peringkat
- Action Verbs Vocabulary Esl Crossword Puzzle Worksheets For KidsDokumen3 halamanAction Verbs Vocabulary Esl Crossword Puzzle Worksheets For KidsMaría Estefania Ascanio ArteagaBelum ada peringkat
- Mboho Mkparawa Ibibio v. Okon - Third Amended Complaint PDFDokumen38 halamanMboho Mkparawa Ibibio v. Okon - Third Amended Complaint PDFMark JaffeBelum ada peringkat
- Laundry-Day FKB PDFDokumen29 halamanLaundry-Day FKB PDFses2003_kBelum ada peringkat
- cs9lscc b0310Dokumen1.034 halamancs9lscc b0310cturinaBelum ada peringkat
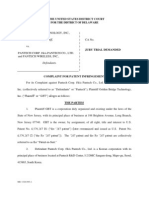
- Golden Bridge Technology v. Pantech Et. Al.Dokumen7 halamanGolden Bridge Technology v. Pantech Et. Al.PriorSmartBelum ada peringkat
- WorksheetWorks Hourly Day Planner 1Dokumen4 halamanWorksheetWorks Hourly Day Planner 1RaquelBelum ada peringkat
- Please DocuSign Tutoring Framework AgreementDokumen9 halamanPlease DocuSign Tutoring Framework AgreementAndres PerezBelum ada peringkat
- LG-6001 Lead Gage: Operation ManualDokumen24 halamanLG-6001 Lead Gage: Operation ManualSukumarBelum ada peringkat
- C212Dokumen5 halamanC212Rufo CascoBelum ada peringkat
- The Yellow Wallpaper by Charlotte Perkins GilmanDokumen21 halamanThe Yellow Wallpaper by Charlotte Perkins GilmanBogdan CoscaruBelum ada peringkat
- History of Communication TechnologyDokumen11 halamanHistory of Communication TechnologyNasrullah KhanBelum ada peringkat
- IDL ENVI Reference Guide PDFDokumen774 halamanIDL ENVI Reference Guide PDFAshoka VanjareBelum ada peringkat
- Moore 1966Dokumen234 halamanMoore 1966splut99100% (1)
- Standard STD 5051,16: Text Marking On PartsDokumen41 halamanStandard STD 5051,16: Text Marking On PartsliuBelum ada peringkat
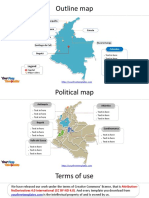
- Mapa de Colombia PraDokumen3 halamanMapa de Colombia PraISRAEL HERNANDEZBelum ada peringkat