Anda mungkin juga menyukai
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDari EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsBelum ada peringkat
- Sources and Sinks of Reactive PowerDokumen2 halamanSources and Sinks of Reactive Powershukla dhavalBelum ada peringkat
- EE 410 EHV AC and DC TransmissionDokumen1 halamanEE 410 EHV AC and DC TransmissionshreyaBelum ada peringkat
- Two Reaction Theory of Salient Pole Synchronous AlternatorDokumen4 halamanTwo Reaction Theory of Salient Pole Synchronous AlternatorAngel Mae AlsuaBelum ada peringkat
- Ehv Ac & DC Unit 3&4 PDFDokumen20 halamanEhv Ac & DC Unit 3&4 PDFAnubhav AggarwalBelum ada peringkat
- Switch Gear and Protection 1Dokumen5 halamanSwitch Gear and Protection 1Irfan UllahBelum ada peringkat
- QuesDokumen2 halamanQuesGmind0% (5)
- Basic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersDokumen25 halamanBasic Electrical and Instrumentation Engineering - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVBelum ada peringkat
- Filter DesignDokumen6 halamanFilter Designnaga7389Belum ada peringkat
- Important QuestionDesign of Power ConvertersDokumen13 halamanImportant QuestionDesign of Power ConvertersSandhiya KBelum ada peringkat
- Parameters Which Effect Real and Reactive Power Flow: I I E X+ZDokumen12 halamanParameters Which Effect Real and Reactive Power Flow: I I E X+ZvenkatBelum ada peringkat
- Emf Equation of AlternatorDokumen2 halamanEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreBelum ada peringkat
- Part BDokumen10 halamanPart BVenkat ManiBelum ada peringkat
- Unit-2-Converter and HVDC System ControlDokumen13 halamanUnit-2-Converter and HVDC System Controlravikumar_ranganBelum ada peringkat
- Advance Power SystemsDokumen88 halamanAdvance Power SystemsRachit KhannaBelum ada peringkat
- FaultDokumen27 halamanFaultግርማ ገ.Belum ada peringkat
- 12 Pulse ConverterDokumen7 halaman12 Pulse ConverterSatish Reddy100% (1)
- What Is Ferranti EffectDokumen3 halamanWhat Is Ferranti Effectboopelectra50% (2)
- Acdc - Synchronous Motor - Lecture Notes 9Dokumen19 halamanAcdc - Synchronous Motor - Lecture Notes 9Cllyan Reyes100% (1)
- HVDC Link ControlDokumen4 halamanHVDC Link ControlSusmita AdhikaryBelum ada peringkat
- 1 - 3a Load Flow Calculations - Theory PDFDokumen4 halaman1 - 3a Load Flow Calculations - Theory PDFblaagicaBelum ada peringkat
- DCMTDokumen37 halamanDCMTGloria HolcombBelum ada peringkat
- PV PQ Bus Switching Power Flow Pscc2008 - 128Dokumen7 halamanPV PQ Bus Switching Power Flow Pscc2008 - 128kcirrenwodBelum ada peringkat
- EE406-2018 Practice QuestionsDokumen1 halamanEE406-2018 Practice QuestionsDevashishBelum ada peringkat
- Ee2351 Question BankDokumen59 halamanEe2351 Question Banksaran_0666100% (1)
- HW 3 SolDokumen3 halamanHW 3 SolJonathan Bathistoel100% (1)
- 4 (B) - IM Drives - AC Voltage ControllersDokumen71 halaman4 (B) - IM Drives - AC Voltage ControllersimdadamuBelum ada peringkat
- Power System Planning and OperationDokumen2 halamanPower System Planning and OperationDrGopikrishna Pasam100% (4)
- HVDC TransmissionDokumen26 halamanHVDC TransmissionAditya TiwariBelum ada peringkat
- Psoc ObjectiveDokumen6 halamanPsoc ObjectiveswarnaBelum ada peringkat
- Experiment# 10: Measure The Power and Power Factor by Three Ammeter MethodDokumen10 halamanExperiment# 10: Measure The Power and Power Factor by Three Ammeter MethodFarwa MunirBelum ada peringkat
- Switchgear and Protection 2Dokumen4 halamanSwitchgear and Protection 2vimal067Belum ada peringkat
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDokumen8 halamanImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- Review Paper On Three Phase Fault AnalysisDokumen6 halamanReview Paper On Three Phase Fault AnalysisPritesh Singh50% (2)
- Emeng 3131 Electrical Power Systems: Fundamentals of Power System Yoseph MekonnenDokumen36 halamanEmeng 3131 Electrical Power Systems: Fundamentals of Power System Yoseph MekonnenmichaelBelum ada peringkat
- 192 - EE8301, EE6401 Electrical Machines I - Question Bank 3Dokumen15 halaman192 - EE8301, EE6401 Electrical Machines I - Question Bank 3Kaleeswari SaraswathiBelum ada peringkat
- Reactive Power CompensationDokumen18 halamanReactive Power CompensationKamugasha KagonyeraBelum ada peringkat
- AC-DC Converter - DDokumen39 halamanAC-DC Converter - DBishnu100% (1)
- Tutorial 4 CT VTDokumen3 halamanTutorial 4 CT VTEyad A. FeilatBelum ada peringkat
- Glover 10 ExDokumen13 halamanGlover 10 ExAseel Bait MaditBelum ada peringkat
- Question BankDokumen17 halamanQuestion BankNisarg PanchalBelum ada peringkat
- Graetz Bridge LCCDokumen42 halamanGraetz Bridge LCCKaran Singhania100% (3)
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionDokumen73 halamanEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaBelum ada peringkat
- Study of Over Current Earth Fault RelayDokumen1 halamanStudy of Over Current Earth Fault RelayVirender RanaBelum ada peringkat
- Report On HVDCDokumen18 halamanReport On HVDCBARUN SINGHBelum ada peringkat
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDokumen3 halamanExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalBelum ada peringkat
- Control of HVDC Transmission System Based On MMCDokumen22 halamanControl of HVDC Transmission System Based On MMCAnand Parakkat ParambilBelum ada peringkat
- All Classroom Class ExamplesDokumen51 halamanAll Classroom Class ExamplesAhmed Sabri0% (1)
- Parallel Capacitor Inverter With Feedback DiodesDokumen9 halamanParallel Capacitor Inverter With Feedback DiodesJayant Kirpekar100% (1)
- Power Saver For Industries & Commercial EstablishmentsDokumen2 halamanPower Saver For Industries & Commercial EstablishmentsPrittam Kumar Jena100% (2)
- Medium Transmission Lines and Long Transmssion LinesDokumen8 halamanMedium Transmission Lines and Long Transmssion LinesRudi AsBelum ada peringkat
- Program For Symmetrical Fault AnalysisDokumen12 halamanProgram For Symmetrical Fault AnalysisBarathBelum ada peringkat
- Static RelaysDokumen11 halamanStatic RelaysBharathwaj SreedharBelum ada peringkat
- Synopsis Proposal For 2021Dokumen4 halamanSynopsis Proposal For 20212k18-EE-243 Vethushan VinnayagamoorththiBelum ada peringkat
- HVDC Lab EC14014Dokumen16 halamanHVDC Lab EC14014Dineswar SmkboyzBelum ada peringkat
- Group5 Lab 09Dokumen6 halamanGroup5 Lab 09FALSERBelum ada peringkat
- Knowledge is "Real Power": Introduction to Power QualityDari EverandKnowledge is "Real Power": Introduction to Power QualityBelum ada peringkat
- Control of HVDCDokumen38 halamanControl of HVDCPrasanna Kumar100% (2)
- A New Control Strategy For A Class of Multiple-Input DC-DC ConvertersDokumen6 halamanA New Control Strategy For A Class of Multiple-Input DC-DC ConvertersAnonymous hzXy93FAEBelum ada peringkat
- Live With IntentionDokumen14 halamanLive With IntentionAnonymous hzXy93FAEBelum ada peringkat
- Role of HVDC in Future Power Systems: by Dr.V.Rajini Professor/EEE SSN College of EnggDokumen87 halamanRole of HVDC in Future Power Systems: by Dr.V.Rajini Professor/EEE SSN College of EnggAnonymous hzXy93FAEBelum ada peringkat
- CemDokumen95 halamanCemAnonymous hzXy93FAEBelum ada peringkat
- Current-Source Converter and Cycloconverter Topologies For Industrial Medium-Voltage DrivesDokumen12 halamanCurrent-Source Converter and Cycloconverter Topologies For Industrial Medium-Voltage DrivesAnonymous hzXy93FAEBelum ada peringkat
- PDFDokumen3 halamanPDFTalha Mehmood0% (1)
- TES P 122 10 R0 Transmission Lines GroundingDokumen28 halamanTES P 122 10 R0 Transmission Lines GroundingPrabhi ThomasBelum ada peringkat
- Arduino Bootloader: The HardwareDokumen5 halamanArduino Bootloader: The HardwareMilan MilenkovićBelum ada peringkat
- Ani C Bus Analyser To Let You Satisfy Your Curiosity: The Secrets of I CDokumen7 halamanAni C Bus Analyser To Let You Satisfy Your Curiosity: The Secrets of I CChico SouzaBelum ada peringkat
- MEO Orals On Marine Electro Technology Function 5Dokumen19 halamanMEO Orals On Marine Electro Technology Function 5Rajeev ValunjkarBelum ada peringkat
- 5fe932d126caf PDFDokumen50 halaman5fe932d126caf PDFYip DavidBelum ada peringkat
- Iskraemeco Mx37y Technical DescriptionDokumen38 halamanIskraemeco Mx37y Technical DescriptionmirelaMEBelum ada peringkat
- Digital TutotrialsDokumen29 halamanDigital Tutotrialsrktiwary256034Belum ada peringkat
- Edc QB Final LatestDokumen15 halamanEdc QB Final LatestrajeshadktBelum ada peringkat
- Invisible EyeDokumen26 halamanInvisible Eyebinit agarwal0% (1)
- 1zua5492-505 - Gas Detector Relay Model 11 and 12Dokumen16 halaman1zua5492-505 - Gas Detector Relay Model 11 and 12Hau Phung VanBelum ada peringkat
- Whatever Happen To The Ground Roll - AnsteyDokumen6 halamanWhatever Happen To The Ground Roll - AnsteybangadesBelum ada peringkat
- Simplex Motion Servo Cncmillbf20Dokumen19 halamanSimplex Motion Servo Cncmillbf20Tomas LopezBelum ada peringkat
- Product SpecificationDokumen4 halamanProduct SpecificationTiago GonçalvesBelum ada peringkat
- C700 User ManualDokumen77 halamanC700 User Manualdanh voBelum ada peringkat
- Design of An Ultracapacitor Based Dynamic Voltage Restorer For Power Quality Enhancement in The Distribution GridDokumen7 halamanDesign of An Ultracapacitor Based Dynamic Voltage Restorer For Power Quality Enhancement in The Distribution GridGRD JournalsBelum ada peringkat
- XNS50660ABDokumen4 halamanXNS50660ABmajochepe25Belum ada peringkat
- 1SBL931074R8010 Ax25 30 10 80 220 230v50hz 230 240v60hz ContactorDokumen4 halaman1SBL931074R8010 Ax25 30 10 80 220 230v50hz 230 240v60hz ContactorkumbrovBelum ada peringkat
- AC Watt Meter ProjectDokumen14 halamanAC Watt Meter ProjectYung SangBelum ada peringkat
- JVC KD-G820 User ManualDokumen352 halamanJVC KD-G820 User ManualfunkenfunkBelum ada peringkat
- Control Cable ScheduleDokumen25 halamanControl Cable Scheduleshrikanth5singhBelum ada peringkat
- VNA Hfst3 CapacitorDokumen8 halamanVNA Hfst3 CapacitorAhmedBelum ada peringkat
- Majorship TLE ElectronicsDokumen11 halamanMajorship TLE ElectronicsJc Mandawe100% (8)
- Res Dip 104 419Dokumen15 halamanRes Dip 104 419Akhil Nath P SBelum ada peringkat
- SFN eRAN13.1 - 09 20210826214516Dokumen440 halamanSFN eRAN13.1 - 09 20210826214516Manuel_VIBelum ada peringkat
- Secrets of DR Rife's Resonant Energy Device Part 2Dokumen5 halamanSecrets of DR Rife's Resonant Energy Device Part 2Donato Lavecchia100% (5)
- CS523S: Operating Systems: Fred KuhnsDokumen40 halamanCS523S: Operating Systems: Fred KuhnsAhmed SaidBelum ada peringkat
- Using UART of PIC Microcontroller With Hi-Tech CDokumen13 halamanUsing UART of PIC Microcontroller With Hi-Tech CYoussef KhairaneBelum ada peringkat
- ECE-D Antenna 4Dokumen30 halamanECE-D Antenna 407ecedbatchBelum ada peringkat
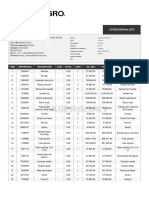
- COT-ASERGRO-NUMERO-2270 BarrazaDokumen2 halamanCOT-ASERGRO-NUMERO-2270 Barrazasandra ariasBelum ada peringkat