Anda mungkin juga menyukai
- Biblioteca Instituto Tecnológico CaranaviDokumen8 halamanBiblioteca Instituto Tecnológico CaranaviAdolfo QuenallataBelum ada peringkat
- Guia TUBO VENTURIDokumen3 halamanGuia TUBO VENTURIAdolfo QuenallataBelum ada peringkat
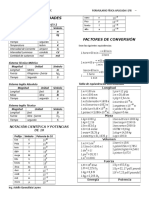
- FORMULARIO FIS-100 1erpDokumen3 halamanFORMULARIO FIS-100 1erpAdolfo Quenallata100% (1)
- Guía # 1 Lab. RefrigeraciónDokumen10 halamanGuía # 1 Lab. RefrigeraciónAdolfo QuenallataBelum ada peringkat
- 1er Examen QMC-100Dokumen1 halaman1er Examen QMC-100Adolfo QuenallataBelum ada peringkat
- Prn-200 Medios de ComunicacionDokumen15 halamanPrn-200 Medios de ComunicacionAdolfo QuenallataBelum ada peringkat
- Declaracion JuradaDokumen1 halamanDeclaracion JuradaAdolfo QuenallataBelum ada peringkat
- 2do Examen QMC-100Dokumen1 halaman2do Examen QMC-100Adolfo QuenallataBelum ada peringkat
- Seminarios Cap Elem PDFDokumen2 halamanSeminarios Cap Elem PDFAdolfo QuenallataBelum ada peringkat
- Quien Controla Los Medios de Comunicacion en BoliviaDokumen3 halamanQuien Controla Los Medios de Comunicacion en BoliviaAdolfo QuenallataBelum ada peringkat
- Practica 1 MEF-400Dokumen2 halamanPractica 1 MEF-400Adolfo QuenallataBelum ada peringkat
- REFRIGERACIÓNDokumen21 halamanREFRIGERACIÓNAdolfo QuenallataBelum ada peringkat
- Valoración SocialDokumen2 halamanValoración SocialAdolfo QuenallataBelum ada peringkat
- Caratula Profocom Warisata PDFDokumen1 halamanCaratula Profocom Warisata PDFAdolfo QuenallataBelum ada peringkat
- Evaluacion 4 BloquesDokumen20 halamanEvaluacion 4 BloquesAdolfo QuenallataBelum ada peringkat
- Valoración SocialDokumen2 halamanValoración SocialAdolfo QuenallataBelum ada peringkat
- Guía Taller Mecanica de BancoDokumen5 halamanGuía Taller Mecanica de BancoAdolfo Quenallata100% (1)
- Qué Es BootearDokumen5 halamanQué Es BootearAdolfo Quenallata80% (5)
- Examen Final EmprendimientoDokumen1 halamanExamen Final EmprendimientoAdolfo QuenallataBelum ada peringkat
- Historieta FísicaDokumen10 halamanHistorieta FísicaAdolfo Quenallata100% (1)
- Cata Logo FachaletasDokumen37 halamanCata Logo FachaletasTallerNic SMABelum ada peringkat
- Profesiogramas Medicina LaboralDokumen14 halamanProfesiogramas Medicina LaboralAutopartes BaronBelum ada peringkat
- Informe de Laboratorio Nº4 Leyes de Newton. Maquinas Simples y Desplazamientos Sobre Un PlanoDokumen13 halamanInforme de Laboratorio Nº4 Leyes de Newton. Maquinas Simples y Desplazamientos Sobre Un Planojavier19alejandroBelum ada peringkat
- PRACTICA - Unidad 2. Software de Simulación-V2Dokumen9 halamanPRACTICA - Unidad 2. Software de Simulación-V2Jonathan Pompeyo RamirezBelum ada peringkat
- 2023 - Guía N°3 (2P) - Tecnicas de OficinaDokumen19 halaman2023 - Guía N°3 (2P) - Tecnicas de OficinaCamila Pava CarreñoBelum ada peringkat
- Trabajo Parcial1.3Dokumen25 halamanTrabajo Parcial1.3Anthony Jayo HamanccayBelum ada peringkat
- Cuadro Comparativo-Pedagogias EmergentesDokumen4 halamanCuadro Comparativo-Pedagogias EmergentesÁngel Antonio Sanchez EcheverriaBelum ada peringkat
- Temas SeleccionadosDokumen45 halamanTemas Seleccionadosherranarte100% (1)
- Cultivo de PaltoDokumen6 halamanCultivo de PaltoYasminia YassBelum ada peringkat
- Flekke Estructura Divan Con 2 Cajones BlancoDokumen48 halamanFlekke Estructura Divan Con 2 Cajones Blancosickosmash19Belum ada peringkat
- Guia 5Dokumen4 halamanGuia 5Erika LozadaBelum ada peringkat
- 2 - Ejercicios Intervalos, Armaduras, Rítmicos PDFDokumen2 halaman2 - Ejercicios Intervalos, Armaduras, Rítmicos PDFTeto PianourquizaBelum ada peringkat
- YPFB Negocia Otra Adenda de Venta de Gas A ArgentinaDokumen2 halamanYPFB Negocia Otra Adenda de Venta de Gas A ArgentinaDIEGOBelum ada peringkat
- Caso ClinicoDokumen7 halamanCaso ClinicoFátima BohorquezBelum ada peringkat
- Laboratorio N 2Dokumen11 halamanLaboratorio N 2Gladys YucraBelum ada peringkat
- Actividades Extraescolares - B1 Inglés PDFDokumen2 halamanActividades Extraescolares - B1 Inglés PDFNatalia Sánchez MorenoBelum ada peringkat
- Pef 2017Dokumen232 halamanPef 2017Walther AriasBelum ada peringkat
- P-Ssoma-03-Fam - Mantenimiento de Subestacion Biposte Nº10Dokumen2 halamanP-Ssoma-03-Fam - Mantenimiento de Subestacion Biposte Nº10Gaby Rivera MezaBelum ada peringkat
- Une 20323 1978Dokumen4 halamanUne 20323 1978haroldalconzBelum ada peringkat
- Planeacion Practica 10.1 - Gabriel EduardoDokumen4 halamanPlaneacion Practica 10.1 - Gabriel EduardokeylaBelum ada peringkat
- FinancieraDokumen11 halamanFinancieraLinares SaraBelum ada peringkat
- Coherencia Cardiaca, Ana BDokumen2 halamanCoherencia Cardiaca, Ana BAndres varsobiaBelum ada peringkat
- Tabla de Especifícaciones de ReactivosDokumen3 halamanTabla de Especifícaciones de ReactivosEventos BonvivantBelum ada peringkat
- El Fichaje IsarDokumen25 halamanEl Fichaje IsarJhim Brandon Hidalgo PacayaBelum ada peringkat
- Aurelio Marín AranzanaDokumen84 halamanAurelio Marín Aranzanahgaleas5Belum ada peringkat
- El Proyecto VenusDokumen1 halamanEl Proyecto VenusAnonymous ko3kUoBelum ada peringkat
- Posibles Preguntas Biologia MolecularDokumen3 halamanPosibles Preguntas Biologia MolecularJuan Carlos Acuña GaldamesBelum ada peringkat
- Guia de Resist MatDokumen9 halamanGuia de Resist MatAlvaro Muruchi Rojas100% (1)
- ExposicionDokumen18 halamanExposicionLuis Alfredo GaiborBelum ada peringkat