Anda mungkin juga menyukai
- PICME User Guide PDFDokumen22 halamanPICME User Guide PDFJasperjames BaldevizoBelum ada peringkat
- MicroPIC18F Lite User ManualDokumen19 halamanMicroPIC18F Lite User ManualElena Gilbert100% (1)
- RS232 Communication Using PIC18F4520 S USART PIC Micro Controller Tutorial Extreme ElectronicsDokumen24 halamanRS232 Communication Using PIC18F4520 S USART PIC Micro Controller Tutorial Extreme ElectronicsHectorLopez100% (1)
- PIC With LCD and ICSP Programmer Board - v3 - JRMDokumen7 halamanPIC With LCD and ICSP Programmer Board - v3 - JRMm_menaka100% (2)
- Avr AtmegaDokumen309 halamanAvr AtmegakcraussBelum ada peringkat
- Micro Board Rev 5Dokumen50 halamanMicro Board Rev 5Arman100% (1)
- Easy PIC-III: User ManualDokumen23 halamanEasy PIC-III: User Manualسامي بخيت ود الخوي100% (1)
- Embedded Sys. & Robotics WorkshopDokumen5 halamanEmbedded Sys. & Robotics WorkshopPriyanka SharmaBelum ada peringkat
- IntroductionDokumen23 halamanIntroductionArryshah Dahmia100% (4)
- Transitioning To MPLAB®X IDEDokumen173 halamanTransitioning To MPLAB®X IDEvelcroBelum ada peringkat
- Ethernet Module ENC28J60 Arduino PDFDokumen5 halamanEthernet Module ENC28J60 Arduino PDFArdian Ramadita SugaraBelum ada peringkat
- Mini Development Board: Users GuideDokumen44 halamanMini Development Board: Users GuideDHANAPRAKAASHBelum ada peringkat
- Distance Measurement System Project Report - Amit BarDokumen32 halamanDistance Measurement System Project Report - Amit BarAmit BarBelum ada peringkat
- Atmel AVR MicrocontrollerDokumen63 halamanAtmel AVR MicrocontrollererwinBelum ada peringkat
- 07 - Chapter 3Dokumen58 halaman07 - Chapter 3Chibueze EzeokaforBelum ada peringkat
- Laboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsDokumen18 halamanLaboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsNguyễn HưngBelum ada peringkat
- LPC2148 User ManualDokumen62 halamanLPC2148 User ManualAri Krishnan0% (2)
- 8051 Microcontroller FAQDokumen160 halaman8051 Microcontroller FAQkranthi633Belum ada peringkat
- STM32F30xx-31xx Standard Peripheral Library UM1581Dokumen584 halamanSTM32F30xx-31xx Standard Peripheral Library UM1581John LeungBelum ada peringkat
- Book DSP - Frank Bormann PDFDokumen712 halamanBook DSP - Frank Bormann PDFPRAKASH JI BARNAWAL Research Scholar, Electrical Engineering, IIT(BHU)50% (2)
- Beginning FPGA Programming - Partie75Dokumen5 halamanBeginning FPGA Programming - Partie75ali alilouBelum ada peringkat
- 9A04602 Microprocessors and MicrocontrollersDokumen4 halaman9A04602 Microprocessors and Microcontrollerssivabharathamurthy100% (1)
- MSc System Test Engineering Course OverviewDokumen4 halamanMSc System Test Engineering Course OverviewAini AiniBelum ada peringkat
- Important Instructions To Examiners:: (Autonomous)Dokumen29 halamanImportant Instructions To Examiners:: (Autonomous)Rohit Shinde RSBelum ada peringkat
- Selected (A1) Project of Automatic Temperature Control SystemDokumen54 halamanSelected (A1) Project of Automatic Temperature Control SystemBelete GetachewBelum ada peringkat
- 08.607 Microcontroller Lab ManualDokumen115 halaman08.607 Microcontroller Lab ManualAssini Hussain100% (12)
- ME-447 Lab Final Exam Paper BDokumen7 halamanME-447 Lab Final Exam Paper BSaad RasheedBelum ada peringkat
- ExamDokumen114 halamanExamVishnu KrishnaBelum ada peringkat
- Part III 8051 General PgmsDokumen7 halamanPart III 8051 General PgmsHEMABelum ada peringkat
- Programming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1Dokumen69 halamanProgramming Industrial Embedded Systems, 2017./2018.: Laboratory Exercise 1_download_only_Belum ada peringkat
- Lecture Notes: Microprocessors and MicrocontrollersDokumen217 halamanLecture Notes: Microprocessors and MicrocontrollersNikhila NikkiBelum ada peringkat
- 3-Wire LCD Driver For CCS PIC C CompilerDokumen6 halaman3-Wire LCD Driver For CCS PIC C CompilerJonathan LazoBelum ada peringkat
- Master and Command C For PIC MCUsDokumen1 halamanMaster and Command C For PIC MCUsmartinez_cvmBelum ada peringkat
- Interfacing Programs For 8085Dokumen37 halamanInterfacing Programs For 8085archankumarturagaBelum ada peringkat
- 8051 Interview QuestionsDokumen8 halaman8051 Interview QuestionsSudheer ReddyBelum ada peringkat
- WinAVR AVRStudio TutorialDokumen4 halamanWinAVR AVRStudio Tutorialaverage_1986Belum ada peringkat
- Digital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression ADokumen19 halamanDigital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AKavya ChoudharyBelum ada peringkat
- ARM Lab Manual1 PDFDokumen53 halamanARM Lab Manual1 PDFAravind RameshBelum ada peringkat
- 8051 Uc CompleteDokumen129 halaman8051 Uc CompletemalhiavtarsinghBelum ada peringkat
- Project Report On Home Automation Using DTMFDokumen9 halamanProject Report On Home Automation Using DTMFankur_1n110% (1)
- T89C51 Training Board Manual GuideDokumen44 halamanT89C51 Training Board Manual GuidedavidegrimaBelum ada peringkat
- ARDUINO UNO DocumentDokumen25 halamanARDUINO UNO DocumentAilapaka ManojBelum ada peringkat
- 8284 ManualDokumen82 halaman8284 ManualTecer Tecer50% (2)
- Training Report of Industrial Interaction in Cetpa Infotech PDFDokumen40 halamanTraining Report of Industrial Interaction in Cetpa Infotech PDFmjdj1230% (1)
- Circuit TodayDokumen30 halamanCircuit TodayBrian GiriBelum ada peringkat
- VLSI Design: 2 To 4 DecoderDokumen1 halamanVLSI Design: 2 To 4 DecoderohgiggitygooBelum ada peringkat
- Firebase ArduinoDokumen49 halamanFirebase ArduinodrutBelum ada peringkat
- Mikroc ManualDokumen333 halamanMikroc ManualAmaury EspinosaBelum ada peringkat
- Fuzzy Logic and Neural NetworksDokumen125 halamanFuzzy Logic and Neural Networkschibssa alemayehu100% (1)
- Curso Pic24j60Dokumen173 halamanCurso Pic24j60Diojan Torres100% (1)
- Image Processing Using Fpgas: ImagingDokumen4 halamanImage Processing Using Fpgas: ImagingAnonymous s516rsBelum ada peringkat
- Getting Started With PIC 18F Microcontroller - MikroC PDFDokumen9 halamanGetting Started With PIC 18F Microcontroller - MikroC PDFdevchandarBelum ada peringkat
- Pic Micro ControllerDokumen83 halamanPic Micro ControllerDenise Nelson100% (3)
- CPU Scheduling Algorithm AssignmentDokumen29 halamanCPU Scheduling Algorithm Assignmentsadman rahmanBelum ada peringkat
- Microprocessor Lab ManualDokumen15 halamanMicroprocessor Lab ManualNicole HyominBelum ada peringkat
- User-Manual 2 SK 40 CDokumen64 halamanUser-Manual 2 SK 40 CRex Alvin FrancisBelum ada peringkat
- SK40B User ManualDokumen25 halamanSK40B User ManualSaifuddin KhanBelum ada peringkat
- PTK40A Quick Start GuideDokumen16 halamanPTK40A Quick Start GuideAFK MasterBelum ada peringkat
- Model Number: GOTT-PTK-40A: Pic Training KitDokumen1 halamanModel Number: GOTT-PTK-40A: Pic Training KitMayu ZukaBelum ada peringkat
- Smart FarmingDokumen11 halamanSmart FarmingmynsdBelum ada peringkat
- PTK40A Examples Guide - Robot Projects Using Microcontroller BoardDokumen87 halamanPTK40A Examples Guide - Robot Projects Using Microcontroller BoardMahayudin SaadBelum ada peringkat
- 1361 Robot Arm PDFDokumen82 halaman1361 Robot Arm PDFMahayudin SaadBelum ada peringkat
- Rotational Robot GripperDokumen27 halamanRotational Robot GripperMahayudin SaadBelum ada peringkat
- 1132 Water Sensor MonitoringDokumen94 halaman1132 Water Sensor MonitoringMahayudin SaadBelum ada peringkat
- Picbasic With Grafics LCD Display PDFDokumen0 halamanPicbasic With Grafics LCD Display PDFEmmanuel PastorBelum ada peringkat
- Sdarticle Jnca WebserverDokumen16 halamanSdarticle Jnca WebserverDigant TyagiBelum ada peringkat
- Sample Shipping SOP SummaryDokumen6 halamanSample Shipping SOP SummaryMahayudin SaadBelum ada peringkat
- RobotDokumen87 halamanRobotMahayudin SaadBelum ada peringkat
- PCB Making ProcessDokumen19 halamanPCB Making ProcessMahayudin SaadBelum ada peringkat
- Negligence at SchoolDokumen12 halamanNegligence at SchoolMahayudin SaadBelum ada peringkat
- E4160 - Microprocessor & Microcontroller SystemDokumen48 halamanE4160 - Microprocessor & Microcontroller SystemHarish Gunasekaran100% (2)
- 01 - Handycam SystemDokumen43 halaman01 - Handycam SystemMahayudin Saad50% (2)
- 01 - DVD MaintenanceDokumen6 halaman01 - DVD MaintenanceMahayudin SaadBelum ada peringkat
- MD10C Users ManualDokumen12 halamanMD10C Users ManualMahayudin SaadBelum ada peringkat
- DVD Block DiagramDokumen1 halamanDVD Block DiagramMahayudin SaadBelum ada peringkat
- ED - Mid Lecture-10 - Part 2Dokumen12 halamanED - Mid Lecture-10 - Part 2Pritam ChakrabortyBelum ada peringkat
- Homework 3: Phase and Timing Estimation Due November 22: EE 477 Introduction To Digital Communications Fall 2019Dokumen2 halamanHomework 3: Phase and Timing Estimation Due November 22: EE 477 Introduction To Digital Communications Fall 2019kelvin mwanikiBelum ada peringkat
- Infineon Bts6133d Ds v01 00 enDokumen17 halamanInfineon Bts6133d Ds v01 00 enmarino246Belum ada peringkat
- Introduction To Arduino MicrocontrollersDokumen32 halamanIntroduction To Arduino MicrocontrollerstopherskiBelum ada peringkat
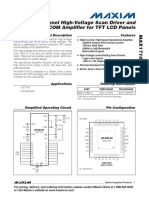
- 10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsDokumen10 halaman10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsVinicius MarcosBelum ada peringkat
- Here Is How To Reflash CARPROG Mcu AT91SAM7S256 Step by StepDokumen9 halamanHere Is How To Reflash CARPROG Mcu AT91SAM7S256 Step by StepManuel SuarezBelum ada peringkat
- T 258Dokumen62 halamanT 258Anonymous NYymdHgyBelum ada peringkat
- Microcomputer and System BUSDokumen25 halamanMicrocomputer and System BUSRocky Samrat100% (1)
- Dell G15 5515: Service ManualDokumen75 halamanDell G15 5515: Service ManualMohitBelum ada peringkat
- Addis Ababa University Addis Ababa Institute of TechnologyDokumen56 halamanAddis Ababa University Addis Ababa Institute of TechnologyFìrœ Lōv MånBelum ada peringkat
- Electrical Resistance: Edexcel Igcse / Certificate in Physics 2-4Dokumen21 halamanElectrical Resistance: Edexcel Igcse / Certificate in Physics 2-4Sam JordanBelum ada peringkat
- ESIGDokumen670 halamanESIGalejandro calixtoBelum ada peringkat
- DatasheetDokumen56 halamanDatasheetrajkumarmalathiBelum ada peringkat
- Lab Report 1 F2023, F2002 .Dokumen13 halamanLab Report 1 F2023, F2002 .nazren shahBelum ada peringkat
- Elevator Disconnect RequirementsDokumen10 halamanElevator Disconnect Requirementssuresh7234Belum ada peringkat
- Abb - MS325Dokumen9 halamanAbb - MS325MisliSlaluAdaBelum ada peringkat
- USB Pinout and WiringDokumen4 halamanUSB Pinout and WiringnelsonhooverBelum ada peringkat
- Computer Networks Lecture - 2-: Dr. Abbas A. AbdulazeezDokumen25 halamanComputer Networks Lecture - 2-: Dr. Abbas A. AbdulazeezDimitris TheodoropoulosBelum ada peringkat
- ARINC 429 to Synchro Converter Model 44SM7Dokumen3 halamanARINC 429 to Synchro Converter Model 44SM7ekinox_es100% (1)
- SA100 V 14 BulletinDokumen8 halamanSA100 V 14 BulletinTeepoonsab somsaiBelum ada peringkat
- D MicroTronDokumen2 halamanD MicroTronLh KooBelum ada peringkat
- Lab 5 Series and Parallel CircuitsDokumen3 halamanLab 5 Series and Parallel CircuitsJimmyPowellBelum ada peringkat
- Datasheet PDFDokumen1 halamanDatasheet PDFLe DungBelum ada peringkat
- Benefits of Preventive Maintenance PDFDokumen19 halamanBenefits of Preventive Maintenance PDFGlendonBelum ada peringkat
- PDFDokumen21 halamanPDFThuso SebinaBelum ada peringkat
- LG PHILIPS 15.0 XGA Color TFT-LCD LM150X08-TLB1 PDFDokumen29 halamanLG PHILIPS 15.0 XGA Color TFT-LCD LM150X08-TLB1 PDFDmitri PetrenkoBelum ada peringkat
- 3SU11000AB401FA0 Datasheet enDokumen4 halaman3SU11000AB401FA0 Datasheet enpatrykk11195Belum ada peringkat
- LED Thin PAR64 User ManualDokumen10 halamanLED Thin PAR64 User ManualAndy P ParsonsBelum ada peringkat
- S6 Sub Maths SBDokumen186 halamanS6 Sub Maths SBFlorence UfituweBelum ada peringkat