Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Lab Report 1Dokumen26 halamanLab Report 1ParvinBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- ASTM TablesDokumen185 halamanASTM Tableslahiru198367% (3)
- ASME PTC 17-1991-Reciprocating IC Engines HighlightedDokumen40 halamanASME PTC 17-1991-Reciprocating IC Engines Highlightedlahiru1983100% (1)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Psslope ManualDokumen47 halamanPsslope ManualMed El Hadi AbidiBelum ada peringkat
- Condition Monitoring of Diesel EnginesDokumen14 halamanCondition Monitoring of Diesel Engineslahiru1983Belum ada peringkat
- Lube Tech025 Oil CleanlinessDokumen4 halamanLube Tech025 Oil Cleanlinesslahiru1983Belum ada peringkat
- Diesel Engine Condition MonitoringDokumen160 halamanDiesel Engine Condition Monitoringlahiru1983Belum ada peringkat
- Diesel Engine Condition MonitoringDokumen160 halamanDiesel Engine Condition Monitoringlahiru1983Belum ada peringkat
- Diesel Engine Condition MonitoringDokumen301 halamanDiesel Engine Condition Monitoringlahiru1983Belum ada peringkat
- Icap 4200 Icp OesDokumen4 halamanIcap 4200 Icp Oeslahiru1983Belum ada peringkat
- Piston SeizuresDokumen7 halamanPiston SeizuresMoaed KanbarBelum ada peringkat
- Piston SeizuresDokumen7 halamanPiston SeizuresMoaed KanbarBelum ada peringkat
- MPC Oil Varnish Potential Testing ASTM D-7843 - White - Paper - Sep - 2016 PDFDokumen5 halamanMPC Oil Varnish Potential Testing ASTM D-7843 - White - Paper - Sep - 2016 PDFMauro MLRBelum ada peringkat
- Introduction To Bomb Calorimetry PDFDokumen12 halamanIntroduction To Bomb Calorimetry PDFAnbu AyyappanBelum ada peringkat
- Lower and Higher Heating Values of Gas Liquid and Solid FuelsDokumen1 halamanLower and Higher Heating Values of Gas Liquid and Solid FuelsNikunj PipariyaBelum ada peringkat
- Introduction To Bomb Calorimetry PDFDokumen12 halamanIntroduction To Bomb Calorimetry PDFAnbu AyyappanBelum ada peringkat
- Element Analysis in Lubricating OilsDokumen12 halamanElement Analysis in Lubricating Oilslahiru1983Belum ada peringkat
- D240 Calorific Value PDFDokumen9 halamanD240 Calorific Value PDFlahiru1983Belum ada peringkat
- Lower and Higher Heating Values of Gas Liquid and Solid FuelsDokumen1 halamanLower and Higher Heating Values of Gas Liquid and Solid FuelsNikunj PipariyaBelum ada peringkat
- Advantages of Pneumatic Control Systems: MAN B&W DieselDokumen10 halamanAdvantages of Pneumatic Control Systems: MAN B&W Diesellahiru1983Belum ada peringkat
- ASTM D 1298 - GustinaDokumen6 halamanASTM D 1298 - GustinaВесна РадинBelum ada peringkat
- Introduction To Bomb Calorimetry PDFDokumen12 halamanIntroduction To Bomb Calorimetry PDFlahiru1983Belum ada peringkat
- Basic Mechanical Speed GovernorsDokumen28 halamanBasic Mechanical Speed Governorslahiru1983Belum ada peringkat
- White Paper - Oil Analysis OverviewDokumen6 halamanWhite Paper - Oil Analysis Overviewlahiru1983Belum ada peringkat
- Aliapur Net Calorific Value PDFDokumen6 halamanAliapur Net Calorific Value PDFlahiru1983Belum ada peringkat
- Engineering GeologyDokumen11 halamanEngineering Geologylahiru1983Belum ada peringkat
- Feasibility StudiesDokumen21 halamanFeasibility Studieslahiru1983Belum ada peringkat
- Steam Turbine TheoryDokumen16 halamanSteam Turbine Theoryvik03223Belum ada peringkat
- UT Technotes 2011.enDokumen11 halamanUT Technotes 2011.enAlexandru StefanBelum ada peringkat
- Francis Turbine Blade ReplacementDokumen44 halamanFrancis Turbine Blade Replacementlahiru1983Belum ada peringkat
- Steam Turbine TheoryDokumen16 halamanSteam Turbine Theoryvik03223Belum ada peringkat
- Che 0411 Steam Heat Exchangers Are UnderworkedDokumen5 halamanChe 0411 Steam Heat Exchangers Are UnderworkedXpizmonBelum ada peringkat
- Estimation of Total Amino AcidsDokumen21 halamanEstimation of Total Amino AcidsVijay BhaaskarlaBelum ada peringkat
- Simple Harmonic MotionDokumen5 halamanSimple Harmonic MotionSamama FahimBelum ada peringkat
- Denver, H., 1985 - Settlement Calculation For Footings On SandDokumen8 halamanDenver, H., 1985 - Settlement Calculation For Footings On SandbusyspiderBelum ada peringkat
- EEG BCI For Dual Task Driving DetectionDokumen9 halamanEEG BCI For Dual Task Driving DetectionBudi SetyawanBelum ada peringkat
- Soil Test SidipurDokumen22 halamanSoil Test SidipurRajib MaharjanBelum ada peringkat
- Buffer SelectionDokumen3 halamanBuffer SelectionSandeep KumarBelum ada peringkat
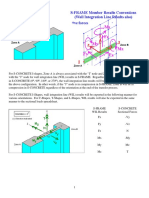
- Wall Integration Conventions S-CONCRETE R11 S-FRAMEDokumen3 halamanWall Integration Conventions S-CONCRETE R11 S-FRAMESyed RaziuddinBelum ada peringkat
- Basic Theory Fluidization (Fluidized Bed) ExperimentDokumen11 halamanBasic Theory Fluidization (Fluidized Bed) ExperimentMuhammad Reza100% (1)
- Materials and Testing MethodsDokumen19 halamanMaterials and Testing MethodsWai Yann ZawBelum ada peringkat
- Double Cone Synchronizer For Vehicle TransmissionDokumen17 halamanDouble Cone Synchronizer For Vehicle TransmissionMujammil Choudhari50% (2)
- CHE122 Engineering Chemistry Laboratory 16842::Dr. Tanay Pramanik 0.0 0.0 2.0 1.0 1:discipline Knowledge, 2:skill EnhancementDokumen5 halamanCHE122 Engineering Chemistry Laboratory 16842::Dr. Tanay Pramanik 0.0 0.0 2.0 1.0 1:discipline Knowledge, 2:skill EnhancementSandeep KakranBelum ada peringkat
- Krasnov, Kiselev, Makarenko, Shikin - Mathematical Analysis For Engineers - Vol 2Dokumen677 halamanKrasnov, Kiselev, Makarenko, Shikin - Mathematical Analysis For Engineers - Vol 2Lee TúBelum ada peringkat
- Failure Analysis of Malin LandslideDokumen16 halamanFailure Analysis of Malin LandslideAnonymous GnfGTwBelum ada peringkat
- Advanced Math SyllabusDokumen2 halamanAdvanced Math Syllabusapi-232573717Belum ada peringkat
- Total Quality Management Objective Questions With Answers Set 4 ScholarexpressDokumen5 halamanTotal Quality Management Objective Questions With Answers Set 4 ScholarexpressMaQsud AhMad SaNdhuBelum ada peringkat
- Rose Diagrams Intro PDFDokumen3 halamanRose Diagrams Intro PDFMahmood MuftiBelum ada peringkat
- Thermal Physics Self-Made NotesDokumen4 halamanThermal Physics Self-Made NotesYee Xien LimBelum ada peringkat
- Comparacion Ansys CFX y TelemacDokumen8 halamanComparacion Ansys CFX y TelemacOscar Choque JaqquehuaBelum ada peringkat
- Lab 1Dokumen25 halamanLab 1Self McBelum ada peringkat
- Digital Image CoorelationDokumen8 halamanDigital Image CoorelationAkmal BhattiBelum ada peringkat
- ASTM D429 Rubber To Metal Adhesion Test EquipmentDokumen4 halamanASTM D429 Rubber To Metal Adhesion Test EquipmentLimBelum ada peringkat
- Iso 76 Rolling BearingsDokumen14 halamanIso 76 Rolling BearingsSezgin Bayrak50% (2)
- "Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY FarmingdaleDokumen15 halaman"Fundamentals of College Physics" Third Edition: Dr. Peter J. Nolan, SUNY Farmingdalehari prasadBelum ada peringkat
- Please Make A Note - 2Dokumen5 halamanPlease Make A Note - 2Ishan MahtoBelum ada peringkat
- Continuous Time Fourier Analysis: Level-1Dokumen18 halamanContinuous Time Fourier Analysis: Level-1kalyanBelum ada peringkat
- 2012, AAG, Tachi - Interactive Freeform Design of TensegrityDokumen10 halaman2012, AAG, Tachi - Interactive Freeform Design of TensegrityPierre ClrBelum ada peringkat
- SSG-NG01017365-GEN-CS-8180-00007 - C01 - Pig Launch Analysis and DSG RPTDokumen53 halamanSSG-NG01017365-GEN-CS-8180-00007 - C01 - Pig Launch Analysis and DSG RPTDaniel Dambo100% (1)