Anda mungkin juga menyukai
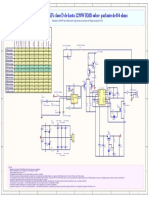
- 25w 1250wDokumen1 halaman25w 1250wneko1212121515123001Belum ada peringkat
- Isd4003 Series: Single-Chip, Multiple-Messages Voice Record/Playback Devices 4-, 5-, 6-, AND 8-MINUTE DURATIONDokumen37 halamanIsd4003 Series: Single-Chip, Multiple-Messages Voice Record/Playback Devices 4-, 5-, 6-, AND 8-MINUTE DURATIONneko1212121515123001Belum ada peringkat
- 8 Appendix of Mbus StandardDokumen1 halaman8 Appendix of Mbus Standardneko1212121515123001Belum ada peringkat
- 24WC01 PDFDokumen10 halaman24WC01 PDFneko1212121515123001Belum ada peringkat
- Pic18f66k90t I PTRSLDokumen570 halamanPic18f66k90t I PTRSLneko1212121515123001Belum ada peringkat
- Pic18f67k22 PDFDokumen550 halamanPic18f67k22 PDFneko1212121515123001Belum ada peringkat
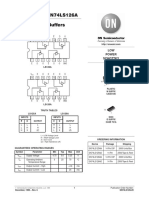
- 74LS125 PDFDokumen5 halaman74LS125 PDFneko1212121515123001Belum ada peringkat
- Ads 1248Dokumen70 halamanAds 1248neko1212121515123001Belum ada peringkat
- 30 BQ060 PB FDokumen6 halaman30 BQ060 PB Fneko1212121515123001Belum ada peringkat
- Hih4000 PDFDokumen6 halamanHih4000 PDFneko1212121515123001Belum ada peringkat
- 2n1487 PDFDokumen3 halaman2n1487 PDFneko1212121515123001Belum ada peringkat
- A Oh I H 4000 Install InstructionDokumen4 halamanA Oh I H 4000 Install Instructionneko1212121515123001Belum ada peringkat
- 74 HC 4060Dokumen13 halaman74 HC 4060anyenkts2Belum ada peringkat
- 2 N 6517Dokumen9 halaman2 N 6517neko1212121515123001Belum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Hướng Dẫn Chấm: Ngày thi: 27 tháng 7 năm 2019 Thời gian làm bài: 180 phút (không kể thời gian giao đề) HDC gồm có 4 trangDokumen4 halamanHướng Dẫn Chấm: Ngày thi: 27 tháng 7 năm 2019 Thời gian làm bài: 180 phút (không kể thời gian giao đề) HDC gồm có 4 trangHưng Quân VõBelum ada peringkat
- Nadee 3Dokumen1 halamanNadee 3api-595436597Belum ada peringkat
- Sample Monologues PDFDokumen5 halamanSample Monologues PDFChristina Cannilla100% (1)
- Amount of Casien in Diff Samples of Milk (U)Dokumen15 halamanAmount of Casien in Diff Samples of Milk (U)VijayBelum ada peringkat
- Technology Based Project: Special Track 1)Dokumen14 halamanTechnology Based Project: Special Track 1)Kim ChiquilloBelum ada peringkat
- C2 - Conveyors Diagram: Peso de Faja Longitud de CargaDokumen1 halamanC2 - Conveyors Diagram: Peso de Faja Longitud de CargaIvan CruzBelum ada peringkat
- Injections Quiz 2Dokumen6 halamanInjections Quiz 2Allysa MacalinoBelum ada peringkat
- Cisco BGP ASPATH FilterDokumen115 halamanCisco BGP ASPATH FilterHalison SantosBelum ada peringkat
- Implementation of E-Governance To Improve The Civil Administration Service Quality in Public SectorDokumen11 halamanImplementation of E-Governance To Improve The Civil Administration Service Quality in Public SectorChristie YohanaBelum ada peringkat
- Promotion-Mix (: Tools For IMC)Dokumen11 halamanPromotion-Mix (: Tools For IMC)Mehul RasadiyaBelum ada peringkat
- IEC TC 56 Dependability PDFDokumen8 halamanIEC TC 56 Dependability PDFsaospieBelum ada peringkat
- Meno's Paradox of Inquiry and Socrates' Theory of RecollectionDokumen10 halamanMeno's Paradox of Inquiry and Socrates' Theory of RecollectionPhilip DarbyBelum ada peringkat
- India TeenagersDokumen3 halamanIndia TeenagersPaul Babu ThundathilBelum ada peringkat
- SachinDokumen3 halamanSachinMahendraBelum ada peringkat
- Assessment of The Genitourinary System: GeneralDokumen2 halamanAssessment of The Genitourinary System: GeneralMaharani UtamiBelum ada peringkat
- Drug Addiction Final (Term Paper)Dokumen15 halamanDrug Addiction Final (Term Paper)Dessa Patiga IIBelum ada peringkat
- Lecture2 GranulopoiesisDokumen9 halamanLecture2 GranulopoiesisAfifa Prima GittaBelum ada peringkat
- Dwnload Full Principles of Economics 7th Edition Frank Solutions Manual PDFDokumen35 halamanDwnload Full Principles of Economics 7th Edition Frank Solutions Manual PDFmirthafoucault100% (8)
- Cambridge IGCSE™: Information and Communication Technology 0417/13 May/June 2022Dokumen15 halamanCambridge IGCSE™: Information and Communication Technology 0417/13 May/June 2022ilovefettuccineBelum ada peringkat
- Biblical World ViewDokumen15 halamanBiblical World ViewHARI KRISHAN PALBelum ada peringkat
- W25509 PDF EngDokumen11 halamanW25509 PDF EngNidhi SinghBelum ada peringkat
- Astm B19Dokumen6 halamanAstm B19Davor IbarraBelum ada peringkat
- SLA in PEGA How To Configue Service Level Agreement - HKRDokumen7 halamanSLA in PEGA How To Configue Service Level Agreement - HKRsridhar varmaBelum ada peringkat
- ReadmeDokumen2 halamanReadmechethan100% (1)
- Epson Stylus Pro 7900/9900: Printer GuideDokumen208 halamanEpson Stylus Pro 7900/9900: Printer GuideJamesBelum ada peringkat
- 20-Admission of PatientDokumen3 halaman20-Admission of Patientakositabon100% (1)
- Phytotherapy On CancerDokumen21 halamanPhytotherapy On CancerSiddhendu Bhattacharjee100% (1)
- Apple Change ManagementDokumen31 halamanApple Change ManagementimuffysBelum ada peringkat
- Lecture 2 Effects of Operating Conditions in VCCDokumen9 halamanLecture 2 Effects of Operating Conditions in VCCDeniell Joyce MarquezBelum ada peringkat
- Design of Penstock: Reference Code:IS 11639 (Part 2)Dokumen4 halamanDesign of Penstock: Reference Code:IS 11639 (Part 2)sunchitk100% (3)