Anda mungkin juga menyukai
- Polos y ceros en el plano-ZDokumen5 halamanPolos y ceros en el plano-ZManuela RamosBelum ada peringkat
- Entendiendo Las Graficas de Polos y Ceros en El Plano Z 1 PDFDokumen5 halamanEntendiendo Las Graficas de Polos y Ceros en El Plano Z 1 PDFDiofante GambaBelum ada peringkat
- Polos y Ceros: Richard BaraniukDokumen3 halamanPolos y Ceros: Richard Baraniuklucia21moralesBelum ada peringkat
- Fluid OsDokumen14 halamanFluid OsJuan Esteban ZuritaBelum ada peringkat
- Facultad de Ingenieria TecnologicaDokumen9 halamanFacultad de Ingenieria TecnologicaNehemias PallaresBelum ada peringkat
- Transformada ZDokumen24 halamanTransformada Zpeluche94Belum ada peringkat
- Control II - Transformada Z InversaDokumen23 halamanControl II - Transformada Z InversaJorgito PacaraBelum ada peringkat
- Análisis de sistemas de tiempo discreto mediante diagramas de polos y cerosDokumen9 halamanAnálisis de sistemas de tiempo discreto mediante diagramas de polos y cerosJose LlempenBelum ada peringkat
- Polos y CerosDokumen5 halamanPolos y CerosAngel FullerBelum ada peringkat
- Práctica 5 - Lugar Geométrico de Las RaícesDokumen14 halamanPráctica 5 - Lugar Geométrico de Las RaícesSergio Machorro Macias0% (1)
- Control II - Transformada Z InversaDokumen35 halamanControl II - Transformada Z InversaAlberto Pacheco HerreraBelum ada peringkat
- Polo CuadraticoDokumen2 halamanPolo CuadraticoEugenio Puche SánchezBelum ada peringkat
- Transformada Z MatlabDokumen3 halamanTransformada Z MatlabJesús CárdenasBelum ada peringkat
- Lab 01Dokumen5 halamanLab 01Gilberto GarciaBelum ada peringkat
- MATLAB ModelosMatematicosSistemasDokumen10 halamanMATLAB ModelosMatematicosSistemasVictorAvilaBelum ada peringkat
- C04 Modelamiento Dinamico en El Dominio de La Frecuencia, Funcion de TransferenciaDokumen12 halamanC04 Modelamiento Dinamico en El Dominio de La Frecuencia, Funcion de TransferenciaPIERO ALDO SIMBRON SANCHEZBelum ada peringkat
- MATLAB Ejemplos de Gráficas en Dos y Tres Dimensiones MedianteDokumen13 halamanMATLAB Ejemplos de Gráficas en Dos y Tres Dimensiones MedianteLeo BurbanoBelum ada peringkat
- Scilab GraficasDokumen6 halamanScilab Graficasfjnarea100% (2)
- Sanabria - Generalización de La Carta de SmithDokumen11 halamanSanabria - Generalización de La Carta de SmithArashi AoiBelum ada peringkat
- Conceptos de Polos y CerosDokumen4 halamanConceptos de Polos y CerosHuntolKiletfg50% (2)
- Lab1 Funcion de TransferenciaDokumen11 halamanLab1 Funcion de TransferenciaAdyanis RiosBelum ada peringkat
- Funcion de RedDokumen32 halamanFuncion de RedPao Lema100% (1)
- LAB. 05 - Transformada ZDokumen6 halamanLAB. 05 - Transformada ZDANILO YANDALY HUAMAN CALDERoNBelum ada peringkat
- 1 Funciones Complejas - 2016-IiDokumen127 halaman1 Funciones Complejas - 2016-IiRenzo Josua Urbina MedinaBelum ada peringkat
- Transformada Z TrabajoDokumen13 halamanTransformada Z TrabajoOsmara Cruz HernandezBelum ada peringkat
- Transformada Z y números complejosDokumen6 halamanTransformada Z y números complejosMary Alarcon PalominoBelum ada peringkat
- Informe 6 PDS OportoDokumen6 halamanInforme 6 PDS OportoLuis Fernando Osorio SanchezBelum ada peringkat
- Matlab GraficasDokumen24 halamanMatlab GraficasMartaBelum ada peringkat
- Graficación en Dos y Tres DimensionesDokumen32 halamanGraficación en Dos y Tres DimensionesAndres Andres Barreto Moreno100% (1)
- Lab3 Funcion de TransferenciaDokumen11 halamanLab3 Funcion de TransferenciaAriel Carlos De LeonBelum ada peringkat
- Guía 1 - FT, VE y BloquesDokumen13 halamanGuía 1 - FT, VE y BloquesAlfredo Adams AguilarBelum ada peringkat
- Sistemas de Control Digital ImparesDokumen23 halamanSistemas de Control Digital ImparesJohn Walter Ticona QuispeBelum ada peringkat
- PR 02Dokumen9 halamanPR 02elcayi muBelum ada peringkat
- Calculo integral múltipleDokumen18 halamanCalculo integral múltiplejulian mtz67% (3)
- Control DigitalDokumen9 halamanControl DigitalLuisAntonioOrtizCruzBelum ada peringkat
- Wunsch Variable Compleja Con Aplicaciones 2da Edicion-186-199Dokumen14 halamanWunsch Variable Compleja Con Aplicaciones 2da Edicion-186-199Meliza GonzálezBelum ada peringkat
- A Transformada ZDokumen45 halamanA Transformada ZhermespolBelum ada peringkat
- Guias de TyCM 3ra FaseDokumen16 halamanGuias de TyCM 3ra FaseRoxford Importaciones ImportacionesBelum ada peringkat
- La Estructura de Grupo de Las Curvas ElípticasDokumen17 halamanLa Estructura de Grupo de Las Curvas ElípticasRicardo VallejoBelum ada peringkat
- LAB. 06 - Transformada Z y Ecuaciones en DiferenciasDokumen6 halamanLAB. 06 - Transformada Z y Ecuaciones en DiferenciasLuis LBelum ada peringkat
- INFORME 1-López Lazo Bruno-17190158Dokumen26 halamanINFORME 1-López Lazo Bruno-17190158BruNo LopezBelum ada peringkat
- CAPITULO 3 Analisis en El L.G.RDokumen34 halamanCAPITULO 3 Analisis en El L.G.RMonica Leandra vargasBelum ada peringkat
- Modelos de polos y ceros en el plano zDokumen7 halamanModelos de polos y ceros en el plano zJuan Carlos MerchanBelum ada peringkat
- Resumen Transformada Z IntroduccionDokumen21 halamanResumen Transformada Z Introduccion12javier12Belum ada peringkat
- Polos y ZerosDokumen8 halamanPolos y ZerosrichkidBelum ada peringkat
- Resumen de Transformada Z DirectaDokumen8 halamanResumen de Transformada Z DirectaYanquiel Mansfarroll GonzalezBelum ada peringkat
- Lugar de Las RaícesDokumen6 halamanLugar de Las RaícesAndres GgaBelum ada peringkat
- Unidad II Funciones de Varias VariablesDokumen11 halamanUnidad II Funciones de Varias VariablesDulce Yolotzin Ávila GonzálezBelum ada peringkat
- Aspectos matemáticos del módulo complejoDokumen26 halamanAspectos matemáticos del módulo complejoylugo1985Belum ada peringkat
- Diagrama de raíces: análisis y sintonización de sistemas de controlDokumen16 halamanDiagrama de raíces: análisis y sintonización de sistemas de controlJuancito ZcBelum ada peringkat
- Transformada ZDokumen28 halamanTransformada ZWill AndBelum ada peringkat
- MODELO de REDES - Formulación GeneralDokumen11 halamanMODELO de REDES - Formulación GeneralMarco KennethBelum ada peringkat
- Laboratorio 4 Elt2692-1-2021Dokumen4 halamanLaboratorio 4 Elt2692-1-2021Miguel Angel Fernández EquizaBelum ada peringkat
- 2da Guia Resueltos Mecanica AnaliticaDokumen23 halaman2da Guia Resueltos Mecanica AnaliticaJosé MaselBelum ada peringkat
- 17 Extr CondicDokumen20 halaman17 Extr CondicmanuelBelum ada peringkat
- Integrales Triples en Coordenadas RectangularesDokumen5 halamanIntegrales Triples en Coordenadas RectangularesYurani ReyesBelum ada peringkat
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDari EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesBelum ada peringkat
- CE82 2023 1A SEM7 SESION 7.2 RAZONES TRIGONOM TRICAS - AnotacionesDokumen17 halamanCE82 2023 1A SEM7 SESION 7.2 RAZONES TRIGONOM TRICAS - AnotacionesOmar QuispeBelum ada peringkat
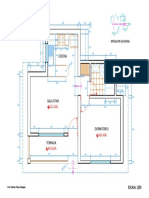
- Plano 2-BDokumen1 halamanPlano 2-BOmar QuispeBelum ada peringkat
- Promart LLAVEDokumen2 halamanPromart LLAVEOmar QuispeBelum ada peringkat
- CE82 2023 1A SEM4 SESIÓN 4.2 FUNCIÓN - AnotacionesDokumen36 halamanCE82 2023 1A SEM4 SESIÓN 4.2 FUNCIÓN - AnotacionesOmar QuispeBelum ada peringkat
- Analisis PDN - CCDokumen13 halamanAnalisis PDN - CCOmar QuispeBelum ada peringkat
- Jerarquia EsquemasDokumen6 halamanJerarquia EsquemasOmar QuispeBelum ada peringkat
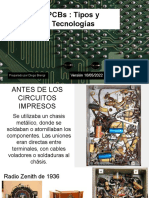
- Tecnologías de PCBDokumen37 halamanTecnologías de PCBOmar QuispeBelum ada peringkat
- Service and Rate Guide Pe Es 2021Dokumen27 halamanService and Rate Guide Pe Es 2021Omar QuispeBelum ada peringkat
- CE82 2023 1A SEM7 SESION 7.1 ECUACIONES EXPONENCIALES Y LOGARITMICAS APLICACIONES - AnotacionesDokumen46 halamanCE82 2023 1A SEM7 SESION 7.1 ECUACIONES EXPONENCIALES Y LOGARITMICAS APLICACIONES - AnotacionesOmar QuispeBelum ada peringkat
- Evita desastres con DRCDokumen6 halamanEvita desastres con DRCOmar QuispeBelum ada peringkat
- CE82 2023 1A SEM6 SESION 6.1 FUNCION CUADRATICA Y APLICACIONES - AnotacionesDokumen32 halamanCE82 2023 1A SEM6 SESION 6.1 FUNCION CUADRATICA Y APLICACIONES - AnotacionesOmar QuispeBelum ada peringkat
- Diseño Electronico Con Altium Designer D2Dokumen92 halamanDiseño Electronico Con Altium Designer D2Itzel Contreras CarmonaBelum ada peringkat
- Practica Chapa MetálicaDokumen1 halamanPractica Chapa MetálicaOmar QuispeBelum ada peringkat
- Alvarado Fernandez Deza ConcoriDokumen187 halamanAlvarado Fernandez Deza ConcoriOmar QuispeBelum ada peringkat
- Active Route Multiple PCBDokumen3 halamanActive Route Multiple PCBOmar QuispeBelum ada peringkat
- Plano 2-ADokumen1 halamanPlano 2-AOmar QuispeBelum ada peringkat
- Arm EschrDokumen2 halamanArm EschrOmar QuispeBelum ada peringkat
- REGLAS DE DISEÑO Y ESTANDARES INDUSTRIALES - PDF Descargar LibreDokumen38 halamanREGLAS DE DISEÑO Y ESTANDARES INDUSTRIALES - PDF Descargar LibreOmar QuispeBelum ada peringkat
- De Cero A GerberDokumen29 halamanDe Cero A GerberOmar QuispeBelum ada peringkat
- VCC3V3 circuit diagramDokumen1 halamanVCC3V3 circuit diagramNguyễn Hưng100% (1)
- EAGLEDokumen32 halamanEAGLEOmar QuispeBelum ada peringkat
- AltiumDokumen25 halamanAltiumJose SCBelum ada peringkat
- YX5200-24SS DFPlayer PDFDokumen38 halamanYX5200-24SS DFPlayer PDFalberto wilber rivera canales100% (1)
- Carro Explorador Un Campo para La AgriculturaDokumen9 halamanCarro Explorador Un Campo para La AgriculturaOmar QuispeBelum ada peringkat
- Plantilla de Curriculum Vitae para EstudiantesDokumen2 halamanPlantilla de Curriculum Vitae para EstudiantesSandra Ramos ColoniaBelum ada peringkat
- Info 23 GHZDokumen11 halamanInfo 23 GHZOmar QuispeBelum ada peringkat
- Linux Calse1Dokumen2 halamanLinux Calse1Omar QuispeBelum ada peringkat
- Síntomas Del AlcoholismoDokumen3 halamanSíntomas Del AlcoholismoOmar QuispeBelum ada peringkat
- En Esta Práctica Hemos Logrado Conocer El Autotransformador Asicomo El Diodo RectificadorDokumen2 halamanEn Esta Práctica Hemos Logrado Conocer El Autotransformador Asicomo El Diodo RectificadorOmar QuispeBelum ada peringkat
- Matematica 6to - 1er BimDokumen15 halamanMatematica 6to - 1er Bimdavid0% (1)
- Modelo Recurso JerarquicoDokumen4 halamanModelo Recurso JerarquicoNicolas Viani88% (8)
- Plan Anual de Tutoría de AulaDokumen4 halamanPlan Anual de Tutoría de AulaMaria Tuero LlazaBelum ada peringkat
- Crianza y manejo de ratones de laboratorioDokumen14 halamanCrianza y manejo de ratones de laboratorioRenatto Taniguchi SalvatierraBelum ada peringkat
- José Mendívil - Laberintos de La PeruanidadDokumen16 halamanJosé Mendívil - Laberintos de La PeruanidadJose MendivilBelum ada peringkat
- Robert GagnéDokumen7 halamanRobert GagnéYoel VA CoberchencoBelum ada peringkat
- Programa Seminario Pensamiento Nacional y LatinoamericanoDokumen9 halamanPrograma Seminario Pensamiento Nacional y Latinoamericanopeofe.taddio23Belum ada peringkat
- Crucigramas Aprendizaje Del BDokumen13 halamanCrucigramas Aprendizaje Del BjorgerobleroBelum ada peringkat
- VLN196408291Dokumen10 halamanVLN196408291luismoya2369Belum ada peringkat
- Bloqueadores H2Dokumen13 halamanBloqueadores H2garciaroxangel100% (1)
- El SalarioDokumen7 halamanEl Salario0492310021 VALENTINA FLOREZ JIMENEZ ESTUDIANTE ACTIVOBelum ada peringkat
- Mandato Judicial "Jonathan Patricio Pinto Cristi" A "Marco Andrés Chesta Quiero"Dokumen2 halamanMandato Judicial "Jonathan Patricio Pinto Cristi" A "Marco Andrés Chesta Quiero"Daniela PérezBelum ada peringkat
- GetFileAttachment PDFDokumen120 halamanGetFileAttachment PDFHECTOR SOLOISOLOBelum ada peringkat
- Factores Hormonales Que Estimulan La EspermatogenesisDokumen4 halamanFactores Hormonales Que Estimulan La EspermatogenesisCarmen Fraga GarzonBelum ada peringkat
- Modulo 1 Microbioma y MicrobiotaDokumen101 halamanModulo 1 Microbioma y MicrobiotaPepa GregoriBelum ada peringkat
- Tarea Semana 4 TeoriasDokumen5 halamanTarea Semana 4 TeoriasAbigail ChidoriBelum ada peringkat
- Lingüística sincrónica: principios y entidadesDokumen4 halamanLingüística sincrónica: principios y entidadesLuis Sánchez Díaz100% (1)
- Solucion Sesion Junio 13 DPCC 5° SecDokumen5 halamanSolucion Sesion Junio 13 DPCC 5° SecLopez ChoccaBelum ada peringkat
- Informe Del Diagnostico de La EmpresaDokumen10 halamanInforme Del Diagnostico de La EmpresaMaria C RojasBelum ada peringkat
- Ibex 35. Normas Técnicas para Su Elaboración.Dokumen33 halamanIbex 35. Normas Técnicas para Su Elaboración.Biblioteca de Turismo y Finanzas, Universidad de SevillaBelum ada peringkat
- Nuevos Apuntes de Psicologia - OdtDokumen4 halamanNuevos Apuntes de Psicologia - OdtPeerGyntBelum ada peringkat
- 2° Sec. La Virgen Maria y Sus Advocaciones Clase 1Dokumen2 halaman2° Sec. La Virgen Maria y Sus Advocaciones Clase 1chakalito eexeBelum ada peringkat
- Pedida de ManoDokumen5 halamanPedida de ManoLeslie RebeccaBelum ada peringkat
- Guía de Manejo Fisioterapéutico Del Síndrome de Desacondicionamiento Físico en Pacientes Con Guillain Barré en Unidad de Cuidado IntensivoDokumen114 halamanGuía de Manejo Fisioterapéutico Del Síndrome de Desacondicionamiento Físico en Pacientes Con Guillain Barré en Unidad de Cuidado IntensivoMaca LlanosBelum ada peringkat
- Resumen Del Libro "Motivar para Ganar"Dokumen14 halamanResumen Del Libro "Motivar para Ganar"Romi DominzaínBelum ada peringkat
- Pre Informe 1 Laboratorio de Física 2Dokumen4 halamanPre Informe 1 Laboratorio de Física 2Juan David Arce MartinezBelum ada peringkat
- Jurisdicción Contencioso-Administrativa VenezuelaDokumen23 halamanJurisdicción Contencioso-Administrativa Venezuelabarreto30Belum ada peringkat
- Comportamiento de Los Fluidos en El YacimientoDokumen15 halamanComportamiento de Los Fluidos en El YacimientoGuerra YilBelum ada peringkat
- Meditaciones Marco AurelioDokumen72 halamanMeditaciones Marco Aurelioapi-3746115100% (1)
- Tarea Académica Semana 2 RESUELTODokumen2 halamanTarea Académica Semana 2 RESUELTOMIGUEL ANGELBelum ada peringkat