Anda mungkin juga menyukai
- Cho Recipe Book PDFDokumen32 halamanCho Recipe Book PDFduga11100% (2)
- Bending Strength of Steel Bracket and Splice PlatesDokumen10 halamanBending Strength of Steel Bracket and Splice PlatesgorgonoidemarcoBelum ada peringkat
- CE201 Reinforced & Prestressed Concrete Structures (2010)Dokumen88 halamanCE201 Reinforced & Prestressed Concrete Structures (2010)asdasBelum ada peringkat
- Gardening With Woodland PDFDokumen385 halamanGardening With Woodland PDFduga11100% (1)
- 21590cancer BrainDokumen39 halaman21590cancer Brainduga11Belum ada peringkat
- 6th Central Pay Commission Salary CalculatorDokumen15 halaman6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Chos Global Natural Farming SarraDokumen110 halamanChos Global Natural Farming Sarradr_eamer100% (16)
- 6th Central Pay Commission Salary CalculatorDokumen15 halaman6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Chapter 5 Lecture 2Dokumen30 halamanChapter 5 Lecture 2burhanuddinBelum ada peringkat
- TRB 015Dokumen9 halamanTRB 015respect9Belum ada peringkat
- Strength Determination of Heavy Clip-Angle Connection ComponentsDokumen10 halamanStrength Determination of Heavy Clip-Angle Connection ComponentsmrnaeemBelum ada peringkat
- 06 DesignAndRetroffitingStrategyOfRCBCJoints PDFDokumen0 halaman06 DesignAndRetroffitingStrategyOfRCBCJoints PDFmy09Belum ada peringkat
- RCC Lecture Series 4 2018-19Dokumen33 halamanRCC Lecture Series 4 2018-19Mansa ArthurBelum ada peringkat
- Sidesway Web Buckling of Steel BeamsDokumen12 halamanSidesway Web Buckling of Steel BeamsYuth Yuthdanai100% (1)
- Lecture 11.4.4 Analysis of Connections Resistance To Moment by Combined Tension and CompresionDokumen24 halamanLecture 11.4.4 Analysis of Connections Resistance To Moment by Combined Tension and CompresionCarlos BustamanteBelum ada peringkat
- Gusset Plate Stability Using Variable Stress TrajectoriesDokumen6 halamanGusset Plate Stability Using Variable Stress TrajectoriestmaBelum ada peringkat
- Flange Curling Model for Cold Formed Steel ProfilesDokumen10 halamanFlange Curling Model for Cold Formed Steel ProfilesDiogoPintoTarrafaBelum ada peringkat
- Bracing of Beams-YuraDokumen91 halamanBracing of Beams-YurajacopapBelum ada peringkat
- Torsional StressesDokumen48 halamanTorsional StressesKory EstesBelum ada peringkat
- Ultimate Resistance of Reinforced Concrete Columns Strengthened With Angles and Battens: Theoretical Model and Experimental ValidationDokumen15 halamanUltimate Resistance of Reinforced Concrete Columns Strengthened With Angles and Battens: Theoretical Model and Experimental ValidationUcok DedyBelum ada peringkat
- Calculation of The Collapse Load of An ADokumen13 halamanCalculation of The Collapse Load of An ALuminita GeorgetaBelum ada peringkat
- Wrap Around Gusset PDFDokumen25 halamanWrap Around Gusset PDFmuralihare100% (1)
- Fenwick & Deam - Design of Opening Corners Between Reinforced Concrete Walls and Slabs Vol 16 No 1 2003Dokumen7 halamanFenwick & Deam - Design of Opening Corners Between Reinforced Concrete Walls and Slabs Vol 16 No 1 2003Ivy HuaBelum ada peringkat
- Analysis and Design For End Effects in Twisted Double TeesDokumen20 halamanAnalysis and Design For End Effects in Twisted Double TeesFabrizio BisernaBelum ada peringkat
- Shear ForceDokumen9 halamanShear ForceMuhamed ZaimBelum ada peringkat
- Chapter 3 Design of Compression Member...Dokumen14 halamanChapter 3 Design of Compression Member...Mesfin Derbew80% (5)
- Design of Vertical BracingDokumen4 halamanDesign of Vertical BracingSz GuoBelum ada peringkat
- A Fresh Look at Bolted End Plate Behaviour and DesignDokumen11 halamanA Fresh Look at Bolted End Plate Behaviour and DesignSulaim Al KautsarBelum ada peringkat
- A Fresh Look at Bolted End-Plate Behavior and Design - Krishnamurthy1978q2Dokumen11 halamanA Fresh Look at Bolted End-Plate Behavior and Design - Krishnamurthy1978q2mert_atasoyBelum ada peringkat
- Simplified Modified Compression Field Theory For Calculating Shear Strength of Reinforced Concrete ElementsDokumen11 halamanSimplified Modified Compression Field Theory For Calculating Shear Strength of Reinforced Concrete ElementsGiuseppe TizzaniBelum ada peringkat
- Simplified Modified Compression Field Theory For Calculating Shear Strength of Reinforced Concrete ElementsDokumen11 halamanSimplified Modified Compression Field Theory For Calculating Shear Strength of Reinforced Concrete ElementsTooma David100% (1)
- Columns 6Dokumen113 halamanColumns 6d584cnBelum ada peringkat
- Design of Saw Tooth ConnectionDokumen10 halamanDesign of Saw Tooth ConnectionHoo Yen HowBelum ada peringkat
- Critical Lateral-Torsional Buckling Moments of Steel Web-Tapered I-BeamsDokumen8 halamanCritical Lateral-Torsional Buckling Moments of Steel Web-Tapered I-BeamsCarloDoimoBelum ada peringkat
- Torsion in Engineering StructuresDokumen16 halamanTorsion in Engineering Structuresabouelrich188Belum ada peringkat
- FCE 231: Torsion of Circular Shafts and Thin-Walled TubesDokumen6 halamanFCE 231: Torsion of Circular Shafts and Thin-Walled TubesRonald obasieBelum ada peringkat
- Thrust Ring - PaperDokumen10 halamanThrust Ring - Paperbhathiya01Belum ada peringkat
- C StrucDesign Bendapudi Sept101Dokumen3 halamanC StrucDesign Bendapudi Sept101ssssgggg1968Belum ada peringkat
- Dicussion On Structural Design of Steel Pipe Support StructuresDokumen3 halamanDicussion On Structural Design of Steel Pipe Support StructuresapirakqBelum ada peringkat
- Model For The Lateral Behavior of RCC Columns - Setzler and Sezen PDFDokumen19 halamanModel For The Lateral Behavior of RCC Columns - Setzler and Sezen PDFSaurabh Bansal BansalBelum ada peringkat
- Precast Frame - 5 Floor DiaphragmsDokumen15 halamanPrecast Frame - 5 Floor DiaphragmsWahid OmarBelum ada peringkat
- StiffenerDokumen11 halamanStiffenerAdigwe George ChimaBelum ada peringkat
- Block Shear Failure Planes of Bolted ConnectionsDokumen28 halamanBlock Shear Failure Planes of Bolted ConnectionsEceBelum ada peringkat
- Design of Vertical Bracing Connections For High Seismic DriftDokumen12 halamanDesign of Vertical Bracing Connections For High Seismic DriftvBelum ada peringkat
- Motallebi Et Al Eng Struc 2019 With STMTDokumen41 halamanMotallebi Et Al Eng Struc 2019 With STMTDavid BourcetBelum ada peringkat
- CIV6235 - Shear (MG)Dokumen26 halamanCIV6235 - Shear (MG)friendycalls100% (1)
- Hwang Et All - Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam-Column Joints For SeismicDokumen14 halamanHwang Et All - Analytical Model For Predicting Shear Strengths of Interior Reinforced Concrete Beam-Column Joints For Seismicbllld100% (1)
- A Fresh Look at Bolted End - Plate Behavior and DesignDokumen11 halamanA Fresh Look at Bolted End - Plate Behavior and DesignBilly BobBelum ada peringkat
- Steel Connections (Bolted Connection)Dokumen29 halamanSteel Connections (Bolted Connection)Ynah Marie BoragayBelum ada peringkat
- Paper Coupling BeamsDokumen14 halamanPaper Coupling BeamsMatías Pino YáñezBelum ada peringkat
- Behaviour of Box Girder BridgesDokumen14 halamanBehaviour of Box Girder BridgesSachin MoreBelum ada peringkat
- Proposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part30Dokumen4 halamanProposed Design Procedures For Shear and Torsion in Reinforced and Prestressed Concrete Ramirez - Part30linghuchongBelum ada peringkat
- Parametric Studies of Steel Cold-Formed Section Beam To Column Moment Connections With Self-Drilling ScrewsDokumen11 halamanParametric Studies of Steel Cold-Formed Section Beam To Column Moment Connections With Self-Drilling ScrewsAhmed SalehBelum ada peringkat
- Designing Well Paths To Reduce Drag and TorqueDokumen7 halamanDesigning Well Paths To Reduce Drag and Torquedrilling moneytreeBelum ada peringkat
- Ductility Analysis of Prestressed Concrete Beams With Unbonded TendonsDokumen9 halamanDuctility Analysis of Prestressed Concrete Beams With Unbonded TendonsvenkatesanjsBelum ada peringkat
- ISOPE-I-99-352 - Load-Deformation Relationships For Gusset-Plate To CHS Tube Joints Under Compression LoadsDokumen9 halamanISOPE-I-99-352 - Load-Deformation Relationships For Gusset-Plate To CHS Tube Joints Under Compression Loadscastille1956Belum ada peringkat
- Lateral Blow-Out Failure of Headed Studs Near a Free EdgeDokumen18 halamanLateral Blow-Out Failure of Headed Studs Near a Free EdgeJimmeBelum ada peringkat
- Concrete&baseplate PDFDokumen18 halamanConcrete&baseplate PDFmitimas2003Belum ada peringkat
- Panel ZonesDokumen10 halamanPanel ZonesGabriel PatileaBelum ada peringkat
- Lab AssignmentDokumen6 halamanLab AssignmentAnurag Pattekar0% (2)
- Cyclic Deformation Capacity, Resistance and Effective Stiffness of RC Members With or Without RetrofittingDokumen8 halamanCyclic Deformation Capacity, Resistance and Effective Stiffness of RC Members With or Without RetrofittingDave WelchBelum ada peringkat
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionDari EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionPenilaian: 2.5 dari 5 bintang2.5/5 (4)
- The Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryDari EverandThe Fatigue Strength of Transverse Fillet Welded Joints: A Study of the Influence of Joint GeometryBelum ada peringkat
- Composite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsDari EverandComposite Structures of Steel and Concrete: Beams, Slabs, Columns and Frames for BuildingsBelum ada peringkat
- Pressure Vessel and Stacks Field Repair ManualDari EverandPressure Vessel and Stacks Field Repair ManualPenilaian: 4 dari 5 bintang4/5 (4)
- Natfire. Sustainability - Fotos PDFDokumen9 halamanNatfire. Sustainability - Fotos PDFduga11Belum ada peringkat
- Architectural Drawings: Aberleigh RenovationDokumen7 halamanArchitectural Drawings: Aberleigh Renovationduga11Belum ada peringkat
- SSW64Dokumen92 halamanSSW64duga11100% (2)
- Klasifikacija DRV Građe-2005 GodDokumen6 halamanKlasifikacija DRV Građe-2005 GodViktor -stBelum ada peringkat
- Brown Rice VinegarBRV PDFDokumen6 halamanBrown Rice VinegarBRV PDFduga11Belum ada peringkat
- Creamy Black Bean Loaf for Vegans Under 40gDokumen1 halamanCreamy Black Bean Loaf for Vegans Under 40gduga11Belum ada peringkat
- Klasifikacija DRV Građe-2005 GodDokumen6 halamanKlasifikacija DRV Građe-2005 GodViktor -stBelum ada peringkat
- ArborDokumen3 halamanArborCharles100% (1)
- Ayurvéda Mantra PDFDokumen44 halamanAyurvéda Mantra PDFpm60100% (2)
- Introduction To Asian Natural FarmingDokumen47 halamanIntroduction To Asian Natural Farminggeen201Belum ada peringkat
- 1500a1550 - Dr. Stephen G. DiverDokumen67 halaman1500a1550 - Dr. Stephen G. Diverduga11100% (1)
- Woodcarving NovDec 2016Dokumen84 halamanWoodcarving NovDec 2016duga11100% (11)
- Woodworker - S Journal - December 2016.bakDokumen92 halamanWoodworker - S Journal - December 2016.bakduga11100% (1)
- Level GB BassaDokumen16 halamanLevel GB Bassaduga11Belum ada peringkat
- Log Homes Construction Manual1Dokumen15 halamanLog Homes Construction Manual1duga11Belum ada peringkat
- ArmstrongDokumen28 halamanArmstrongduga11Belum ada peringkat
- Dovetails JQSM PDFDokumen10 halamanDovetails JQSM PDFduga11Belum ada peringkat
- Thermal Properties of Log Homes: Reprint EditionDokumen3 halamanThermal Properties of Log Homes: Reprint Editionduga11Belum ada peringkat
- Finishing Log HomesDokumen16 halamanFinishing Log Homesduga11Belum ada peringkat
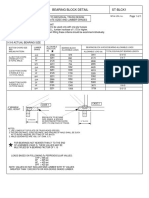
- Bearing Block Detail JANUARY 1, 2009 St-Blck1Dokumen1 halamanBearing Block Detail JANUARY 1, 2009 St-Blck1duga11Belum ada peringkat
- LCG 5Dokumen9 halamanLCG 5mail87523Belum ada peringkat
- Energy Performance Log HomesDokumen29 halamanEnergy Performance Log Homesduga11Belum ada peringkat
- Understanding Wind LoadsDokumen7 halamanUnderstanding Wind Loadsduga11Belum ada peringkat
- Plateing Options in MiTekDokumen10 halamanPlateing Options in MiTekduga11100% (1)
- REE Board Exam April 2013 EE ReviewDokumen3 halamanREE Board Exam April 2013 EE ReviewBenji Nocete80% (5)
- Moisture and Total Solids AnalysisDokumen44 halamanMoisture and Total Solids AnalysisNicholas BoampongBelum ada peringkat
- Design, Analysis and Fabrication of Split Braking SystemDokumen6 halamanDesign, Analysis and Fabrication of Split Braking Systemhabib nawazBelum ada peringkat
- Kid-sized humanoid robot design paperDokumen4 halamanKid-sized humanoid robot design paperHimanshu VermaBelum ada peringkat
- Errata FE WasimDokumen4 halamanErrata FE WasimchafobostonBelum ada peringkat
- Wiles1994 - in Situ Stress Determination Using The Under-Excavation Technique - I. TheoryDokumen8 halamanWiles1994 - in Situ Stress Determination Using The Under-Excavation Technique - I. TheoryRisantoBelum ada peringkat
- ENCH4PP: Petroleum & Synthetic Fuel ProcessingDokumen16 halamanENCH4PP: Petroleum & Synthetic Fuel ProcessingAshrafBelum ada peringkat
- The Relevance of YS/UTS RatioDokumen21 halamanThe Relevance of YS/UTS RatiocarrespmBelum ada peringkat
- Compass Swing ProcedureDokumen23 halamanCompass Swing ProcedureMiro Hsd100% (2)
- ABB Motors Technical Data SheetDokumen1 halamanABB Motors Technical Data SheetAgung AfrizalBelum ada peringkat
- Becker 1987Dokumen16 halamanBecker 1987Luis Fernando Vergaray AstupiñaBelum ada peringkat
- Forces and Gravity QuestionsDokumen4 halamanForces and Gravity QuestionsJan DefrBelum ada peringkat
- Colless, Matthew - The New CosmologyDokumen249 halamanColless, Matthew - The New CosmologyShade SemjazaBelum ada peringkat
- E024-01-0852-2017 Cat1Dokumen7 halamanE024-01-0852-2017 Cat1churchill ochiengBelum ada peringkat
- Reduction To Functions of Positive Acute AnglesDokumen8 halamanReduction To Functions of Positive Acute Anglesx seyiBelum ada peringkat
- IAL - Physics - SB2 - Teaching Plans - 7BDokumen10 halamanIAL - Physics - SB2 - Teaching Plans - 7BsalmaBelum ada peringkat
- Apllied Electric Circuit Objective Question and AnswerDokumen42 halamanApllied Electric Circuit Objective Question and AnswerGanesan KandasamyBelum ada peringkat
- Cosmos 2007Dokumen38 halamanCosmos 2007Oswaldo NeaveBelum ada peringkat
- Fire DetectionDokumen81 halamanFire DetectionKah HomBelum ada peringkat
- Kirchhoff's Laws: Sample Problem 1Dokumen5 halamanKirchhoff's Laws: Sample Problem 1Eduard LauronBelum ada peringkat
- What Are Stiffness Modifiers in EtabsDokumen35 halamanWhat Are Stiffness Modifiers in EtabsHiren Desai50% (2)
- CH 04Dokumen17 halamanCH 04Vishal PanwarBelum ada peringkat
- Moments, Levers and Gears 3 QPDokumen19 halamanMoments, Levers and Gears 3 QPdeepheat_008Belum ada peringkat
- Bending Deflection - Macaulay Step Functions: AE1108-II: Aerospace Mechanics of MaterialsDokumen9 halamanBending Deflection - Macaulay Step Functions: AE1108-II: Aerospace Mechanics of MaterialsAyanwale-cole pelumi AkeemBelum ada peringkat
- Lamp Flicker On Power SystemsDokumen22 halamanLamp Flicker On Power SystemsJhon Elmer Luque LuqueBelum ada peringkat
- Lake Ridge Academy 9 - 12 Curriculum GuideDokumen2 halamanLake Ridge Academy 9 - 12 Curriculum GuidevanermedusaBelum ada peringkat
- Biconvex WinsDokumen4 halamanBiconvex WinsSoorya PrashanthBelum ada peringkat
- Generator DataDokumen8 halamanGenerator DataMohammad Ibnul HossainBelum ada peringkat