Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Pump Design WorksheetDokumen3 halamanPump Design Worksheetejzuppelli8036100% (8)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- 9-Valves Rating9Dokumen29 halaman9-Valves Rating9Mohamed FouadBelum ada peringkat
- Kind of ValvesDokumen2 halamanKind of ValvesMohamed FouadBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Kind of ValvesDokumen2 halamanKind of ValvesMohamed FouadBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Design of Pumping Machinery For Lifting Water From Source To Proposed/existing RCC Sump. Annexure-2Dokumen1 halamanDesign of Pumping Machinery For Lifting Water From Source To Proposed/existing RCC Sump. Annexure-2Sn SatyanarayanaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Diaphragm Valves: Prof. DR: Nazih BayomiDokumen68 halamanDiaphragm Valves: Prof. DR: Nazih BayomiMohamed FouadBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Pre-Feasibility Study: S H I P B R E A K I N GDokumen46 halamanPre-Feasibility Study: S H I P B R E A K I N GMohamed FouadBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Cont RoundDokumen1 halamanCont RoundMohamed FouadBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Pump CalcDokumen8 halamanPump CalcMohamed FouadBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Brochure Marine ServicesDokumen12 halamanBrochure Marine ServicesMohamed FouadBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Propeller Performance and Weight Predictions Appended To The Navy/NASADokumen40 halamanPropeller Performance and Weight Predictions Appended To The Navy/NASAMohamed FouadBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Modularization Analysis Presentation Revised PDFDokumen38 halamanModularization Analysis Presentation Revised PDFshiva1978in@gmail.comBelum ada peringkat
- Detail - MTU OnlineDokumen1 halamanDetail - MTU OnlineMohamed FouadBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Hydraulically Driven Deck MachineryDokumen2 halamanHydraulically Driven Deck MachineryMohamed FouadBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- 40ft shallowWaterWorkBarge1Dokumen1 halaman40ft shallowWaterWorkBarge1Mohamed FouadBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Bollard Pull CalculationDokumen1 halamanBollard Pull CalculationMark Samsel Rohan100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
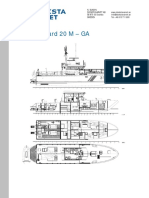
- 20m Ga Drawings1Dokumen1 halaman20m Ga Drawings1Mohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge3Dokumen1 halaman40ft shallowWaterWorkBarge3Mohamed FouadBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- 40ft shallowWaterWorkBarge5Dokumen1 halaman40ft shallowWaterWorkBarge5Mohamed FouadBelum ada peringkat
- 40ft shallowWaterWorkBarge4 2Dokumen1 halaman40ft shallowWaterWorkBarge4 2Mohamed FouadBelum ada peringkat
- Full Text 01Dokumen61 halamanFull Text 01Imam BaihaqiBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- IACS Shipbuilding and Repair Quality Standards No 47 Rev 5 Oct 2010Dokumen59 halamanIACS Shipbuilding and Repair Quality Standards No 47 Rev 5 Oct 2010nyaungzin100% (2)
- ForanTribon Into 3D Naval Architect Jan12Dokumen2 halamanForanTribon Into 3D Naval Architect Jan12Mohamed FouadBelum ada peringkat
- Amirikiann A.analysis and Design .1957.TRANSDokumen55 halamanAmirikiann A.analysis and Design .1957.TRANSMohamed FouadBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- 40ft shallowWaterWorkBarge2Dokumen1 halaman40ft shallowWaterWorkBarge2Mohamed FouadBelum ada peringkat
- Wang DDokumen4 halamanWang DMohamed FouadBelum ada peringkat
- V53 2 p95 p102 PDFDokumen8 halamanV53 2 p95 p102 PDFMohamed FouadBelum ada peringkat
- 04 2 PDFDokumen11 halaman04 2 PDFMohamed FouadBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Optimizacion Ship DesignDokumen13 halamanOptimizacion Ship Designlucas polo100% (1)
- 1211 1365 PDFDokumen14 halaman1211 1365 PDFMohamed FouadBelum ada peringkat
- Guidance Notes For Survey and Inspection of Jacking Systems 9 May 16 Rev 2Dokumen10 halamanGuidance Notes For Survey and Inspection of Jacking Systems 9 May 16 Rev 2syedainahmadBelum ada peringkat
- ParameterDokumen342 halamanParameterirving lopezBelum ada peringkat
- Dynamics of Machine ManualDokumen16 halamanDynamics of Machine ManualDevangMarvaniaBelum ada peringkat
- Project Abstract - Electrical Steering Gear SystemDokumen16 halamanProject Abstract - Electrical Steering Gear SystemAdwaith Krishnan100% (1)
- A Procedure To Determine The Unknown Geometry of External Cylindrical Gears - Gear Solutions Magazine Your Resource To The Gear IndustryDokumen11 halamanA Procedure To Determine The Unknown Geometry of External Cylindrical Gears - Gear Solutions Magazine Your Resource To The Gear IndustryChetan PrajapatiBelum ada peringkat
- Design of Footstep Power Generation System Using Rack and Pinion Gears MechanismDokumen5 halamanDesign of Footstep Power Generation System Using Rack and Pinion Gears MechanismMuhammad Hamza TahirBelum ada peringkat
- 07 E65+Suspension+&+Steering PDFDokumen21 halaman07 E65+Suspension+&+Steering PDFMshiboniumBelum ada peringkat
- Welding Automation - Carpano Equipment Catalog 2016 PDFDokumen128 halamanWelding Automation - Carpano Equipment Catalog 2016 PDFGilberto GarciaBelum ada peringkat
- Rod Pump ThesisDokumen6 halamanRod Pump Thesisbsqfc4d5100% (2)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Building Your Own Raw1.5Dokumen48 halamanBuilding Your Own Raw1.5MAXIMODRAGON100% (1)
- Four-Wheel Steering Mechanism - ReviewDokumen4 halamanFour-Wheel Steering Mechanism - ReviewRajatBelum ada peringkat
- DJJ 10033-Chapter 5Dokumen45 halamanDJJ 10033-Chapter 5Abbas SeuBelum ada peringkat
- 5-1 Phaser 3635MFP Parts List Draft 4Dokumen34 halaman5-1 Phaser 3635MFP Parts List Draft 4Jose CeronBelum ada peringkat
- Kinematics of Machine ToolsDokumen28 halamanKinematics of Machine ToolsRohit Kaushik100% (6)
- Servo Drive SystemDokumen85 halamanServo Drive SystemJoe JoeBelum ada peringkat
- Types of Artificial Gripper MechanismsDokumen6 halamanTypes of Artificial Gripper Mechanismschamp8866Belum ada peringkat
- Alimake Raise ClimberDokumen20 halamanAlimake Raise ClimberANSHUL YADAVBelum ada peringkat
- 444j 544j 624j Tm9011 Manual Tecnico John DeereDokumen69 halaman444j 544j 624j Tm9011 Manual Tecnico John DeereFelipe Molina DiazBelum ada peringkat
- Inkoma Shaft Hub ConnectionsDokumen31 halamanInkoma Shaft Hub ConnectionsnikitaBelum ada peringkat
- JVC KS - FX772R Service ManualDokumen35 halamanJVC KS - FX772R Service ManualPaula KaBelum ada peringkat
- Robotics Fulll 2 16 Marks With AnswerDokumen57 halamanRobotics Fulll 2 16 Marks With AnswerSiva RamanBelum ada peringkat
- Muhoja AssignmentDokumen9 halamanMuhoja AssignmentSire MkubwaBelum ada peringkat
- Power Generation Using Speed BreakerDokumen32 halamanPower Generation Using Speed BreakerChetan Tiwary0% (1)
- Introduction To Toothed Gearing, Gear Classification and NomenclatureDokumen14 halamanIntroduction To Toothed Gearing, Gear Classification and NomenclatureSharad PawarBelum ada peringkat
- Buku Manual TeriosDokumen43 halamanBuku Manual TeriosFaozan BayuBelum ada peringkat
- Semi Automatic Material Carrier For Mining & Tunneling ApplicationsDokumen4 halamanSemi Automatic Material Carrier For Mining & Tunneling ApplicationsAnonymous kw8Yrp0R5rBelum ada peringkat
- DIY IIT Dharwad Mid Eval ReportDokumen4 halamanDIY IIT Dharwad Mid Eval ReportSonu SouravBelum ada peringkat
- Rack and Pinion Steering DesigningDokumen19 halamanRack and Pinion Steering DesigningAudrian Louven Realubit Sabado0% (2)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonDari EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonPenilaian: 5 dari 5 bintang5/5 (2)
- Electronics All-in-One For Dummies, 3rd EditionDari EverandElectronics All-in-One For Dummies, 3rd EditionPenilaian: 5 dari 5 bintang5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 4.5 dari 5 bintang4.5/5 (9)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesDari EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesPenilaian: 5 dari 5 bintang5/5 (1)