Anda mungkin juga menyukai
- Principios Solid Devexperto 1Dokumen29 halamanPrincipios Solid Devexperto 1jczeladaBelum ada peringkat
- Principios Solid Devexperto 1Dokumen29 halamanPrincipios Solid Devexperto 1jczeladaBelum ada peringkat
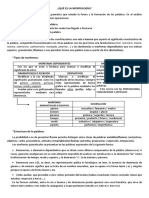
- Apuntes de Analisis Morfologico1 PDFDokumen15 halamanApuntes de Analisis Morfologico1 PDFpyn2409Belum ada peringkat
- Curso de Morfosintaxis BACHILLERATO BuenazoDokumen86 halamanCurso de Morfosintaxis BACHILLERATO BuenazoNH RoselloBelum ada peringkat
- B 71 ADokumen4 halamanB 71 AJuan Flores MorocoBelum ada peringkat
- 3079 10162 1 PB PDFDokumen28 halaman3079 10162 1 PB PDFJuan Flores MorocoBelum ada peringkat
- Soria 00Dokumen30 halamanSoria 00Juan Flores MorocoBelum ada peringkat
- Un Método para La Desambiguación Sintáctica de Tipo Coordinativo Y Preposicional A Method For Coordinative and Prepositional Syntactic DisambiguationDokumen14 halamanUn Método para La Desambiguación Sintáctica de Tipo Coordinativo Y Preposicional A Method For Coordinative and Prepositional Syntactic DisambiguationJuan Flores MorocoBelum ada peringkat
- 28 Pag121Dokumen4 halaman28 Pag121Juan Flores MorocoBelum ada peringkat
- Análisis sintáctico paso a pasoDokumen16 halamanAnálisis sintáctico paso a pasoThalia Milanova Arias TellesBelum ada peringkat
- Gui As para El Ana Lisis Morfolo Gico Septiembre 2012Dokumen33 halamanGui As para El Ana Lisis Morfolo Gico Septiembre 2012Sergio Salazar LatorreBelum ada peringkat
- Analisis MorfologicoDokumen10 halamanAnalisis MorfologicoJuan Flores MorocoBelum ada peringkat
- Lenguaje y CerebroDokumen13 halamanLenguaje y CerebroJosé Carlos AroniBelum ada peringkat
- 59 113 1 SM PDFDokumen6 halaman59 113 1 SM PDFJuan Flores MorocoBelum ada peringkat
- IA-02 Introduccion (2,4) ColorDokumen112 halamanIA-02 Introduccion (2,4) ColorJuan Flores MorocoBelum ada peringkat
- IA-03 Introduccion (3) Historia AI ColorDokumen52 halamanIA-03 Introduccion (3) Historia AI ColorJuan Flores MorocoBelum ada peringkat
- IA-01 Introduccion (1) ColorDokumen74 halamanIA-01 Introduccion (1) ColorJuan Flores MorocoBelum ada peringkat
- IA-03 Introduccion (3) Historia AI ColorDokumen52 halamanIA-03 Introduccion (3) Historia AI ColorJuan Flores MorocoBelum ada peringkat
- IA-00 PresentaciónDokumen24 halamanIA-00 PresentaciónJuan Flores MorocoBelum ada peringkat
- 21 Guia JavaDokumen11 halaman21 Guia JavaJuan Flores MorocoBelum ada peringkat
- 18 Guia Java-MysqlDokumen10 halaman18 Guia Java-MysqlJuan Flores MorocoBelum ada peringkat
- 20 Guia Java-MysqlDokumen4 halaman20 Guia Java-MysqlJuan Flores MorocoBelum ada peringkat
- 16 Guia Java-MysqlDokumen11 halaman16 Guia Java-MysqlJuan Flores MorocoBelum ada peringkat
- 20 Guia Java-MysqlDokumen4 halaman20 Guia Java-MysqlJuan Flores MorocoBelum ada peringkat
- 17 Guia Java-MysqlDokumen7 halaman17 Guia Java-MysqlJuan Flores MorocoBelum ada peringkat
- 14 Guia JavaDokumen5 halaman14 Guia JavaJuan Flores MorocoBelum ada peringkat
- 19 Guia Java-MysqlDokumen8 halaman19 Guia Java-MysqlJuan Flores MorocoBelum ada peringkat
- 15 Guia JavaDokumen3 halaman15 Guia JavaJuan Flores MorocoBelum ada peringkat
- 14 Guia JavaDokumen5 halaman14 Guia JavaJuan Flores MorocoBelum ada peringkat
- Accidentes policiales por mal uso de armasDokumen8 halamanAccidentes policiales por mal uso de armasCeleste GimenezBelum ada peringkat
- Exposición P PachoDokumen5 halamanExposición P PachoMauricio TapiasBelum ada peringkat
- 01 - GeN2 Comfort TecnicoDokumen24 halaman01 - GeN2 Comfort Tecnicoamma18275651Belum ada peringkat
- 2021-Competencias-Capacidades Desempeños - Contenidos Por Áreas - Unidad 7Dokumen579 halaman2021-Competencias-Capacidades Desempeños - Contenidos Por Áreas - Unidad 7rubi guillermoBelum ada peringkat
- Tema 7 H CuantitativaDokumen37 halamanTema 7 H CuantitativaDan Chate Velasque.Belum ada peringkat
- 3 Costos EstimadosDokumen5 halaman3 Costos EstimadosCarol Patricia Micá PérezBelum ada peringkat
- Qué Es El Campo Visual y Qué Importancia TieneDokumen4 halamanQué Es El Campo Visual y Qué Importancia TieneFelipe Matteo Garcia ZambitoBelum ada peringkat
- Teoría, género y ciencia ficciónDokumen17 halamanTeoría, género y ciencia ficciónMorganitaSurrealismeBelum ada peringkat
- COMPASS Valvulas Reguladoras CaudalDokumen6 halamanCOMPASS Valvulas Reguladoras Caudaleddy ortegaBelum ada peringkat
- El Comunismo PrimitivoDokumen12 halamanEl Comunismo PrimitivoivasitonBelum ada peringkat
- Estadistica 1Dokumen14 halamanEstadistica 1Tommy MendezBelum ada peringkat
- Cap 7 TallerDokumen3 halamanCap 7 TallerJenny Pineda100% (1)
- Práctica de Escalas de Inteligencia - TEST PSICOMÉTRICOS DE EFICIENCIA (Huallanca Carrera, Lucy Esperanza)Dokumen9 halamanPráctica de Escalas de Inteligencia - TEST PSICOMÉTRICOS DE EFICIENCIA (Huallanca Carrera, Lucy Esperanza)Lucy HopeBelum ada peringkat
- El Marco Legal en Materia de Medicina Tradicional en Venezuela, Etica y LegislacionDokumen5 halamanEl Marco Legal en Materia de Medicina Tradicional en Venezuela, Etica y LegislacionEstefani vBelum ada peringkat
- Manifestación de Impacto Ambiental Del Megaproyecto Ecocida MirasierraDokumen718 halamanManifestación de Impacto Ambiental Del Megaproyecto Ecocida MirasierraComité SalvabosqueBelum ada peringkat
- ComicDokumen36 halamanComicRushian Sarai AmbrosioBelum ada peringkat
- Clase y Guía de HistoriaDokumen6 halamanClase y Guía de HistoriaVerónica AndreaBelum ada peringkat
- Caso Clinico TBCDokumen1 halamanCaso Clinico TBCAngelinho Flores PalominoBelum ada peringkat
- 01-Sistemas de NumeracionDokumen21 halaman01-Sistemas de NumeracionWalter RamónBelum ada peringkat
- Horizonte Temprano y MedioDokumen26 halamanHorizonte Temprano y MedioJohann Vasquez0% (1)
- Copia de CONTROL DE LECTURADokumen2 halamanCopia de CONTROL DE LECTURAJavier Alejandro Lara CorreaBelum ada peringkat
- Glosario Minero Final 29-05-2015 GGGDokumen17 halamanGlosario Minero Final 29-05-2015 GGGJonathan Pier Linarez LaizaBelum ada peringkat
- IDARE e IDEREDokumen9 halamanIDARE e IDEREsrBelum ada peringkat
- Capacitación - Accidente OfidicoDokumen62 halamanCapacitación - Accidente OfidicoAlejandra GomezBelum ada peringkat
- PML AmbDokumen25 halamanPML AmbDoris CTBelum ada peringkat
- Esclavizando CelularesDokumen39 halamanEsclavizando CelularesRomel Ccarhuas CarrascoBelum ada peringkat
- Como Convertir Un Documento en PDF A ExcelDokumen2 halamanComo Convertir Un Documento en PDF A ExcelFranciscoBelum ada peringkat
- La Ensenanza de CulturaDokumen4 halamanLa Ensenanza de CulturaDanilú Oropeza VázquezBelum ada peringkat
- Rubrica BanderaDokumen1 halamanRubrica BanderaIvan Nuñez Cornejo100% (1)
- Cuestionario de botánica sobre órganos, reproducción y dispersión de plantasDokumen4 halamanCuestionario de botánica sobre órganos, reproducción y dispersión de plantasFabio Coronado VacaBelum ada peringkat