Anda mungkin juga menyukai
- Unidad 2 - Fase 3 - Elaborar Registros Contables y Cierre Del PeriodoDokumen36 halamanUnidad 2 - Fase 3 - Elaborar Registros Contables y Cierre Del PeriodoLizeth Rivero75% (4)
- Plan de Respaldo y Restauración de Datos para El ProyectoDokumen5 halamanPlan de Respaldo y Restauración de Datos para El ProyectoDiego Alejandro Restrepo FlorezBelum ada peringkat
- Guia de Power BiDokumen131 halamanGuia de Power BiAlain Kevin Rojas Quiroga100% (3)
- TAREA FODA Y MATRIZ FODA y GANTT PDFDokumen2 halamanTAREA FODA Y MATRIZ FODA y GANTT PDFYolanda DoicelaBelum ada peringkat
- Una Vez Formulado El Modelo Matemático Hacemos Uso DelDokumen3 halamanUna Vez Formulado El Modelo Matemático Hacemos Uso DelRaulBelum ada peringkat
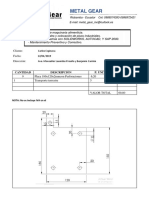
- Cotizacion Carlos EspinozaDokumen2 halamanCotizacion Carlos EspinozaRaulBelum ada peringkat
- Moa AriasDokumen1 halamanMoa AriasRaulBelum ada peringkat
- Motor EsDokumen2 halamanMotor EsRaulBelum ada peringkat
- Exámen de SuspensiónDokumen3 halamanExámen de SuspensiónRaulBelum ada peringkat
- Fisica II y Laboratorio (Consulta)Dokumen16 halamanFisica II y Laboratorio (Consulta)RaulBelum ada peringkat
- Torn IlloDokumen19 halamanTorn IlloRaulBelum ada peringkat
- RODAMIENTOSDokumen10 halamanRODAMIENTOSRaulBelum ada peringkat
- 05 Poleas para Cables de Acero Tipo PMADokumen3 halaman05 Poleas para Cables de Acero Tipo PMALuis Carlos100% (1)
- Estructura Atomica PDFDokumen32 halamanEstructura Atomica PDFRaulBelum ada peringkat
- RODAMIENTOSDokumen10 halamanRODAMIENTOSRaulBelum ada peringkat
- Tablas Engranajes PDFDokumen1 halamanTablas Engranajes PDFRaulBelum ada peringkat
- Pasadores MecánicosDokumen5 halamanPasadores MecánicosRaulBelum ada peringkat
- Sistemas de Flujo Laminar en Gases 001Dokumen2 halamanSistemas de Flujo Laminar en Gases 001RaulBelum ada peringkat
- CablesDokumen24 halamanCablesOscar Javier Monsalve PinzónBelum ada peringkat
- Circuitos SecuencialesDokumen23 halamanCircuitos SecuencialesNano LopezBelum ada peringkat
- Sony Mex n5100btDokumen40 halamanSony Mex n5100btPepeBelum ada peringkat
- Diferencias Divididas - InterpolacionDokumen5 halamanDiferencias Divididas - InterpolacionLuisMiguelQuispeOlmedoBelum ada peringkat
- Plan de Trabajo de La Unidad de Sistemas y Red 2017Dokumen20 halamanPlan de Trabajo de La Unidad de Sistemas y Red 2017EROVELY YOSMIN ZABALETA PEREZBelum ada peringkat
- Circular Dpayt N 19-21 Atencion Virtual de Jubilacion - Nodo InteractivoDokumen8 halamanCircular Dpayt N 19-21 Atencion Virtual de Jubilacion - Nodo InteractivoEstudio Alvarezg AsociadosBelum ada peringkat
- Arquitectura Básica de Un Compilador.Dokumen24 halamanArquitectura Básica de Un Compilador.Rogger MendoBelum ada peringkat
- Actividad Eje3Dokumen13 halamanActividad Eje3Mauricio Jimenez EstrellaBelum ada peringkat
- Manual Google Forms-AlumnosDokumen40 halamanManual Google Forms-AlumnosJARA CASAS MAGALY ISABELBelum ada peringkat
- Tarea 4Dokumen2 halamanTarea 4David RodriguezBelum ada peringkat
- Herramientas InformaticasDokumen18 halamanHerramientas InformaticasMariana CTBelum ada peringkat
- 281 360Dokumen80 halaman281 360Jorge Ignacio MVBelum ada peringkat
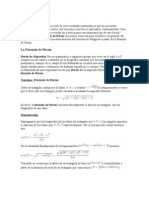
- El Teorema de Pitágoras Demostracion Mediante El Teorema de HeronDokumen3 halamanEl Teorema de Pitágoras Demostracion Mediante El Teorema de HeronMario Peña TapiaBelum ada peringkat
- Examen 2Dokumen8 halamanExamen 2Manuela MerchanBelum ada peringkat
- Qué Es La Propiedad Intelectual TLC CON ESTADOS UNIDOSDokumen8 halamanQué Es La Propiedad Intelectual TLC CON ESTADOS UNIDOSRafa FonckBelum ada peringkat
- Preguntas Dinmizadoras Unidad 2 2019Dokumen9 halamanPreguntas Dinmizadoras Unidad 2 2019Andres CastroBelum ada peringkat
- División de PolinomiosDokumen3 halamanDivisión de PolinomiosRoberto ApazaBelum ada peringkat
- Grupo PresupuestoDokumen19 halamanGrupo PresupuestoErlinBelum ada peringkat
- Informe-Señales Verticales PDFDokumen9 halamanInforme-Señales Verticales PDFJeff CamachoBelum ada peringkat
- 03 B022 10209 PDFDokumen1 halaman03 B022 10209 PDFAnonymous QZlDF8VlR8Belum ada peringkat
- Análisis de Sistema Organizacional de La Empresa Industrias Powercon para Propuesta de Mejoramiento.Dokumen5 halamanAnálisis de Sistema Organizacional de La Empresa Industrias Powercon para Propuesta de Mejoramiento.cda mivaquitaBelum ada peringkat
- Ejercicios 68000Dokumen2 halamanEjercicios 68000Luisdceo LggBelum ada peringkat
- FFP Colombia - Manual Tecnico V09 - 2022Dokumen107 halamanFFP Colombia - Manual Tecnico V09 - 2022Daniela BulaBelum ada peringkat
- Medidor de InductanciasDokumen4 halamanMedidor de InductanciasMartín SayagoBelum ada peringkat
- Tipos de Datos y OperadoresDokumen5 halamanTipos de Datos y OperadoresLilian CarguaBelum ada peringkat
- Ejercicios de BD DesarrolladoDokumen16 halamanEjercicios de BD Desarrolladoanon_45708786Belum ada peringkat
- Introducción A La Seguridad de Los Sistemas OperativosDokumen9 halamanIntroducción A La Seguridad de Los Sistemas OperativoshectorBelum ada peringkat