Anda mungkin juga menyukai
- MECATRÓNICA CONTROL Y AUTOMATIZACIÓNDari EverandMECATRÓNICA CONTROL Y AUTOMATIZACIÓNPenilaian: 5 dari 5 bintang5/5 (1)
- Control de Procesos IDokumen11 halamanControl de Procesos IAlejandro Luna Cardenas100% (1)
- Teoria de Control IDokumen11 halamanTeoria de Control IGaz Letona33% (3)
- 18 - Sistemas ExperimentalesDokumen11 halaman18 - Sistemas ExperimentalesSonny Moore100% (2)
- Metodología básica de instrumentación industrial y electrónicaDari EverandMetodología básica de instrumentación industrial y electrónicaPenilaian: 4 dari 5 bintang4/5 (12)
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónDari EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónPenilaian: 3.5 dari 5 bintang3.5/5 (5)
- Modelado y Simulacion de Sistemas MecatronicosDokumen2 halamanModelado y Simulacion de Sistemas MecatronicosDanielCruzBelum ada peringkat
- Electrónica análoga: Diseño de circuitosDari EverandElectrónica análoga: Diseño de circuitosPenilaian: 4.5 dari 5 bintang4.5/5 (15)
- Laboratorio de circuitos electrónicos I: Experimentación básica con diodos y transistores. 2ª ediciónDari EverandLaboratorio de circuitos electrónicos I: Experimentación básica con diodos y transistores. 2ª ediciónPenilaian: 4 dari 5 bintang4/5 (4)
- Ricoeur-La Metáfora VivaDokumen438 halamanRicoeur-La Metáfora VivaSeba100% (6)
- Elementos de Control ElectricoDokumen12 halamanElementos de Control ElectricoAlan Yair Ceballos CruzBelum ada peringkat
- Teora de Control IIDokumen11 halamanTeora de Control IIclarkiBelum ada peringkat
- 31-Teoria de Control IDokumen11 halaman31-Teoria de Control IAntonio RuizBelum ada peringkat
- Circuitos DigitalesDokumen10 halamanCircuitos DigitalesadrianBelum ada peringkat
- Introducción A Sistemas AutomáticosDokumen11 halamanIntroducción A Sistemas AutomáticosAlfonsoVaronaMezaBelum ada peringkat
- Secretaría Académica Secretaría Académica: Instituto Politécnico Nacional Instituto Politécnico NacionalDokumen11 halamanSecretaría Académica Secretaría Académica: Instituto Politécnico Nacional Instituto Politécnico NacionalAldo Espinosa GallegosBelum ada peringkat
- Modelado de Sistemas PDFDokumen11 halamanModelado de Sistemas PDFGaz LetonaBelum ada peringkat
- Teoría de Control DigitalDokumen12 halamanTeoría de Control DigitalJavLo LopBelum ada peringkat
- C6 Sistemas de Control IDokumen8 halamanC6 Sistemas de Control IAlexander Mauricio Torres AguilaBelum ada peringkat
- SILABO-1703139-SISTEMAS DE CONTROL (E) (2024-A) Ing. Henry Davis Lama CornejoDokumen6 halamanSILABO-1703139-SISTEMAS DE CONTROL (E) (2024-A) Ing. Henry Davis Lama CornejoGONZALO RAUL TICONA GRANADOSBelum ada peringkat
- Metrologia y Normalizacion - CompressDokumen11 halamanMetrologia y Normalizacion - CompressKari ZavalaBelum ada peringkat
- Plan Asignatura ModeladoDokumen6 halamanPlan Asignatura ModeladoMarcoRuizBelum ada peringkat
- Analisis Numerico PDFDokumen12 halamanAnalisis Numerico PDFJesús VascoBelum ada peringkat
- MecanismosDokumen15 halamanMecanismosLuisBelum ada peringkat
- Neum Tica BisDokumen15 halamanNeum Tica BisAlvaro Torres CastilloBelum ada peringkat
- MECG1055 Contenidos de Curso ReportDokumen3 halamanMECG1055 Contenidos de Curso ReportJohnny PuenteBelum ada peringkat
- Microprocesadores 1Dokumen9 halamanMicroprocesadores 1RG JKariBelum ada peringkat
- M970 - Automatización de Procesos Industriales PDFDokumen10 halamanM970 - Automatización de Procesos Industriales PDFAlberto CortezBelum ada peringkat
- Interfases Perifericos y Programación IIDokumen11 halamanInterfases Perifericos y Programación IIArturoBelum ada peringkat
- Sílabo Control Automático 2018-IDokumen17 halamanSílabo Control Automático 2018-IFidel Andía GuzmánBelum ada peringkat
- Programa Análisis de Sistemas DinámicosDokumen9 halamanPrograma Análisis de Sistemas DinámicosÁngel Rojo ChávezBelum ada peringkat
- Metodos NumericosDokumen3 halamanMetodos NumericosEstela Betancourt100% (1)
- Syllabus Control IiDokumen9 halamanSyllabus Control IirenatoBelum ada peringkat
- SISTEMASDECONTROLCLASICO UndefinedDokumen7 halamanSISTEMASDECONTROLCLASICO UndefinedLuis angel Pérez paucarBelum ada peringkat
- Análisis NuméricoDokumen12 halamanAnálisis NuméricoOsvaldo AguirreBelum ada peringkat
- Temario - Espacio de EstadosDokumen14 halamanTemario - Espacio de EstadosAxel Fuentes0% (1)
- Silabo SistemasDeControlClasicoDokumen7 halamanSilabo SistemasDeControlClasicoCarolina CaceresBelum ada peringkat
- Control IDokumen12 halamanControl IEduardo Lopez SalasBelum ada peringkat
- Fisica Clasica ProgramasDokumen17 halamanFisica Clasica ProgramasGonzales SergioBelum ada peringkat
- 6CM11 Ramirez Villedas Emiliano - ExtraordinarioDokumen431 halaman6CM11 Ramirez Villedas Emiliano - ExtraordinarioRicardo SorianoBelum ada peringkat
- GuiadelEstudiante 02 2023Dokumen9 halamanGuiadelEstudiante 02 2023miguel.granoblesBelum ada peringkat
- Instrumentacion AutomotrizDokumen11 halamanInstrumentacion Automotrizhugo venturaBelum ada peringkat
- 1.presentacion Automatizacion 2023 IDokumen16 halaman1.presentacion Automatizacion 2023 Ie2014200426gBelum ada peringkat
- Syllabus Sistemas de ControlDokumen6 halamanSyllabus Sistemas de ControlJuanPa BurbanoBelum ada peringkat
- PDS 2022-23 Guia-CompletaDokumen11 halamanPDS 2022-23 Guia-CompletaCarlos M del RíoBelum ada peringkat
- Instrumentacion I PDFDokumen12 halamanInstrumentacion I PDFLozada Rojas JavierBelum ada peringkat
- 42-Interfases y MicrocontroladoresDokumen12 halaman42-Interfases y MicrocontroladoresVanBelum ada peringkat
- Ciclo-07-Ie-Sistemas de ControlDokumen2 halamanCiclo-07-Ie-Sistemas de ControlRomel Cárdenas JavierBelum ada peringkat
- Sistemas OperativosDokumen12 halamanSistemas OperativosninasugBelum ada peringkat
- Interfaces, Perifericos y Programación I BisDokumen10 halamanInterfaces, Perifericos y Programación I BisAlfonsoSaucedoBelum ada peringkat
- ProgramasAsignaturas Titulacion 73 AsigUMA 5523Dokumen1 halamanProgramasAsignaturas Titulacion 73 AsigUMA 5523Energya CorporacionBelum ada peringkat
- Plan Trabajo RedesI-WQHDokumen6 halamanPlan Trabajo RedesI-WQHWilfredo QuispeBelum ada peringkat
- Sistemas Electrónicos Digitales - 06Dokumen11 halamanSistemas Electrónicos Digitales - 06PEdro RUizBelum ada peringkat
- Electrónica IndustrialDokumen16 halamanElectrónica Industrialrusée19Belum ada peringkat
- Mecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaDari EverandMecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaPenilaian: 5 dari 5 bintang5/5 (3)
- Instrumentación electrónica aplicada: Prácticas de laboratorioDari EverandInstrumentación electrónica aplicada: Prácticas de laboratorioPenilaian: 3.5 dari 5 bintang3.5/5 (7)
- Mecatrónica: modelado, simulación y control de sistemas físicosDari EverandMecatrónica: modelado, simulación y control de sistemas físicosBelum ada peringkat
- Análisis numérico en fenómenos de transporte. Casos de estudioDari EverandAnálisis numérico en fenómenos de transporte. Casos de estudioBelum ada peringkat
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Dari EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Belum ada peringkat
- Teoria de La InformacionDokumen12 halamanTeoria de La InformacionTom Número Tres0% (1)
- Linea Del Tiempo Desarrollo de La AdminiDokumen3 halamanLinea Del Tiempo Desarrollo de La AdminiAntonio RuizBelum ada peringkat
- Formato para Reinscripción 17-2Dokumen1 halamanFormato para Reinscripción 17-2Antonio RuizBelum ada peringkat
- Sentimientos de La NaciónDokumen158 halamanSentimientos de La NaciónFernando CoronaBelum ada peringkat
- Ingles Caso EstudioDokumen4 halamanIngles Caso EstudioLourdes G-pBelum ada peringkat
- Aborto en Animales, AgropecuariaDokumen9 halamanAborto en Animales, AgropecuariaLina Calvo BaenaBelum ada peringkat
- SINCRONOSCOPIODokumen24 halamanSINCRONOSCOPIOFrank C. FloresBelum ada peringkat
- Informe de Inventario de Pozos Subterranesos - Aaa MantaroDokumen44 halamanInforme de Inventario de Pozos Subterranesos - Aaa MantaroCarlos OscanoaBelum ada peringkat
- Pocsag PDFDokumen2 halamanPocsag PDFmanadaelefBelum ada peringkat
- Nino Bravo, Te Quiero, Te Quiero - Letra y AcordesDokumen3 halamanNino Bravo, Te Quiero, Te Quiero - Letra y AcordesAarón Rodriguez CarvalloBelum ada peringkat
- Cuestionario SenaDokumen5 halamanCuestionario SenaYenyfer VirguezBelum ada peringkat
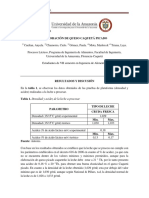
- Grupo 6-Queso Caquetá PicadoDokumen5 halamanGrupo 6-Queso Caquetá PicadoMarlon Stiven Motta ManriqueBelum ada peringkat
- Estudio de CasosDokumen14 halamanEstudio de CasosFavio VasquezBelum ada peringkat
- Comercio Informal Final FinalDokumen15 halamanComercio Informal Final FinalNicolas MartinBelum ada peringkat
- CTE CachimayoDokumen10 halamanCTE CachimayoAnonymous fD5rH2xBelum ada peringkat
- Programa de PF 1 2011Dokumen3 halamanPrograma de PF 1 2011ttypt_tallermayBelum ada peringkat
- Carmen Silva 3° Año Actividad 3 LaminarioDokumen3 halamanCarmen Silva 3° Año Actividad 3 LaminarioAlejandro Villanueva100% (1)
- Taller 4Dokumen4 halamanTaller 4EIEEBelum ada peringkat
- Resumen Capítulo 9 "Elementos de Economía Política" Krause - Zanotti - RavierDokumen4 halamanResumen Capítulo 9 "Elementos de Economía Política" Krause - Zanotti - RavierNachoBelum ada peringkat
- Ensayo Sobre Efectos de La GlobalizaciónDokumen3 halamanEnsayo Sobre Efectos de La Globalizaciónrigoberto_miranda78% (9)
- Qué Es Chavín de HuántarDokumen10 halamanQué Es Chavín de HuántarMj RodrigoBelum ada peringkat
- INFORMATICA MODULO 22 Cuestionario CONTESTADO,.Dokumen10 halamanINFORMATICA MODULO 22 Cuestionario CONTESTADO,.berthaBelum ada peringkat
- Recomendaciónes para Conducción InvernalDokumen12 halamanRecomendaciónes para Conducción InvernalCarlos Alberto LERTORABelum ada peringkat
- La Comprension de LecturaDokumen36 halamanLa Comprension de LecturaLorena Mardones RiquelmeBelum ada peringkat
- Cotizacíon Mallas Zaranda ST4.8Dokumen1 halamanCotizacíon Mallas Zaranda ST4.8Luis ValenciaBelum ada peringkat
- Clase #14Dokumen39 halamanClase #14Kenneth MercadoBelum ada peringkat
- Actividad de Puntos Evaluables - Escenario 6 - SEGUNDO BLOQUE-CIENCIAS BASICAS - MATEMATICAS - (GRUPO13)Dokumen8 halamanActividad de Puntos Evaluables - Escenario 6 - SEGUNDO BLOQUE-CIENCIAS BASICAS - MATEMATICAS - (GRUPO13)Luisa Fernanda Sierra BecerraBelum ada peringkat
- 3° Clase Virtual 5°Dokumen9 halaman3° Clase Virtual 5°silvia salonioBelum ada peringkat
- LEBAME Estabilidad de Este BioproductoDokumen7 halamanLEBAME Estabilidad de Este BioproductoAlejandroBelum ada peringkat
- Unidad 1 y 2 Marco LegalDokumen12 halamanUnidad 1 y 2 Marco Legalalphamoron51Belum ada peringkat
- Actividad 7 ContabilidadDokumen5 halamanActividad 7 ContabilidadJuan Diego RiascosBelum ada peringkat
- ImagenesdelaTradicionclasicaCristiana 2018 MMDokumen394 halamanImagenesdelaTradicionclasicaCristiana 2018 MMEl Desván de MamenBelum ada peringkat