Anda mungkin juga menyukai
- Puente H CalculosDokumen2 halamanPuente H Calculosjosemaraz0% (1)
- Puente H CalculosDokumen3 halamanPuente H CalculosAndres DiazBelum ada peringkat
- Polarizacion Del Transistor BJTDokumen8 halamanPolarizacion Del Transistor BJTAlexis Horna100% (1)
- Notas de IE - 414 Configuracion DarlingtonDokumen8 halamanNotas de IE - 414 Configuracion DarlingtonMichelle CórdovaBelum ada peringkat
- Thevenini y Norton NotasDokumen15 halamanThevenini y Norton NotasMaxiBelum ada peringkat
- Teorema de Thevenin y NortonDokumen20 halamanTeorema de Thevenin y NortonElmerBelum ada peringkat
- EISI TTLCaracCompORNOTDokumen7 halamanEISI TTLCaracCompORNOTJuan Diego Garcia HernandezBelum ada peringkat
- Capitulo3-Leyes de Ohm y de Kirchoff-TransistoresDokumen5 halamanCapitulo3-Leyes de Ohm y de Kirchoff-TransistoresIndy Garcia100% (1)
- TransistoresDokumen11 halamanTransistoresDescargas VariasBelum ada peringkat
- Teorema de Thevenin y NortonDokumen19 halamanTeorema de Thevenin y NortonmanuelBelum ada peringkat
- Acondicionamiento de Señales para Un TermoparDokumen8 halamanAcondicionamiento de Señales para Un Termoparosvaldo23Belum ada peringkat
- Ebers MollDokumen18 halamanEbers Mollinside121100% (1)
- 4° El Transistor BJT Como Interruptor 1Dokumen14 halaman4° El Transistor BJT Como Interruptor 1Josue PorrasBelum ada peringkat
- Leyes de KirchkoffDokumen20 halamanLeyes de KirchkoffSamir AlvaradoBelum ada peringkat
- Guia Resuelta 1Dokumen13 halamanGuia Resuelta 1RDM The ProducerBelum ada peringkat
- 07.el Transistor - 18Dokumen10 halaman07.el Transistor - 18gmaldo7183Belum ada peringkat
- Transistor bipolar: estructura, funcionamiento y aplicacionesDokumen90 halamanTransistor bipolar: estructura, funcionamiento y aplicacionesPablo IpialesBelum ada peringkat
- Informe Previo N°5Dokumen17 halamanInforme Previo N°5Gustavo GonzalesBelum ada peringkat
- Transistor BJT Como InterruptorDokumen2 halamanTransistor BJT Como InterruptorVictor NuñezBelum ada peringkat
- Modelo Hibrido PiDokumen9 halamanModelo Hibrido Picarlaflorez100% (1)
- Foro 2 Circuitos ElectricosDokumen16 halamanForo 2 Circuitos ElectricosAdrián Medel DueñasBelum ada peringkat
- Convertidor Digital/Analógico de 4 BitsDokumen2 halamanConvertidor Digital/Analógico de 4 BitsiloesBelum ada peringkat
- 1.2 Dispositivos de DisparoDokumen16 halaman1.2 Dispositivos de DisparoRicardo Ballesteros MartínezBelum ada peringkat
- Experiencia N°5Dokumen9 halamanExperiencia N°5carlis flores100% (1)
- Informe Final 5 HuablochoDokumen5 halamanInforme Final 5 Huablochofieeg4Belum ada peringkat
- Laboratorio de Electricidad 14CIRCUITOS PARALELO EN CORRIENTE ALTERNADokumen10 halamanLaboratorio de Electricidad 14CIRCUITOS PARALELO EN CORRIENTE ALTERNABrayan Daniel Taype Olivares100% (1)
- 3 Ebers MollDokumen18 halaman3 Ebers Mollyojanlopez26officialBelum ada peringkat
- 4 Cap 4c EAI PDFDokumen5 halaman4 Cap 4c EAI PDFLuis MorenoBelum ada peringkat
- Aplicación de Fuente de Corriente (Polarización y Carga Activa)Dokumen12 halamanAplicación de Fuente de Corriente (Polarización y Carga Activa)edelmira100% (1)
- Teorema de Thevenin y NortonDokumen13 halamanTeorema de Thevenin y NortonMaría Alexandra Aparicio RivasBelum ada peringkat
- Ejercicios 2Dokumen2 halamanEjercicios 2David Veloza0% (1)
- BJT Colector Comun PNPDokumen21 halamanBJT Colector Comun PNPMaxwell SDBelum ada peringkat
- Coleccion Ejercicios PDFDokumen118 halamanColeccion Ejercicios PDFEmilio CortiBelum ada peringkat
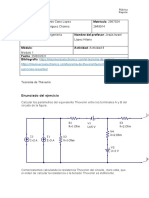
- Actividad 4 Teorema Thevenin y NortonDokumen9 halamanActividad 4 Teorema Thevenin y NortonCarlos Antonio Cano LopezBelum ada peringkat
- Amplificadores Monoetapa - Alterna (Cont.)Dokumen13 halamanAmplificadores Monoetapa - Alterna (Cont.)Lucas PabloBelum ada peringkat
- Cálculo de Frecuencia y Ciclo de TrabajoDokumen11 halamanCálculo de Frecuencia y Ciclo de Trabajowilfredo aliagaBelum ada peringkat
- Parámetros y Circuitos Equivalentes de Los Transistores Bipolares-Teorema de Thevenin-Teorema de NortonDokumen8 halamanParámetros y Circuitos Equivalentes de Los Transistores Bipolares-Teorema de Thevenin-Teorema de NortonEli GarciaBelum ada peringkat
- Tema #01-Transformadores Monofásicos y TrifásicosDokumen10 halamanTema #01-Transformadores Monofásicos y TrifásicosOmar Alonso Vega VilchezBelum ada peringkat
- Laboratorio 3Dokumen9 halamanLaboratorio 3Dana LawlietBelum ada peringkat
- Analisis de Circuitos en Corriente ContinuaDokumen32 halamanAnalisis de Circuitos en Corriente ContinuaBryan MediBelum ada peringkat
- Practica 2 Electronica III Acondicionamiento de SeñalDokumen5 halamanPractica 2 Electronica III Acondicionamiento de SeñalNicolas Robles BelloBelum ada peringkat
- Valor Efectivo Onda SinusoidalDokumen23 halamanValor Efectivo Onda SinusoidalYeffersonAlexanderColmenaresBelum ada peringkat
- PracticaDokumen8 halamanPracticajesus arvizuBelum ada peringkat
- Amplificador cuasicomplementario en contrafase: análisis y optimizaciónDokumen24 halamanAmplificador cuasicomplementario en contrafase: análisis y optimizaciónGastonRodrigoPotenzaBelum ada peringkat
- Tema5 BJTDokumen34 halamanTema5 BJTaportuguez3118Belum ada peringkat
- Tutorial Transistor EsDokumen14 halamanTutorial Transistor Eselvergonzalez1Belum ada peringkat
- Circuito BJT NPN con polarización de emisor común - Solución Práctica 2Dokumen4 halamanCircuito BJT NPN con polarización de emisor común - Solución Práctica 2Yacson Ruiz SanchezBelum ada peringkat
- TransitoresDokumen10 halamanTransitoreslelopolisBelum ada peringkat
- El Transistor en ConmutacionDokumen9 halamanEl Transistor en Conmutacioncharles81Belum ada peringkat
- Analisis de Circuitos en Corriente ContinuaDokumen32 halamanAnalisis de Circuitos en Corriente ContinuaVermouth SamaBelum ada peringkat
- Circuitos de DisparoDokumen11 halamanCircuitos de DisparoMario David Mairena MadrizBelum ada peringkat
- Curva Caracteristica Del TransistorDokumen14 halamanCurva Caracteristica Del TransistorMary Rodriguez100% (1)
- Configuracion en Emisor ComunDokumen13 halamanConfiguracion en Emisor ComunEDUARDO OYANEDERBelum ada peringkat
- Comparadores PDFDokumen10 halamanComparadores PDFAquim Francisco BonillaBelum ada peringkat
- Armónicas en Sistemas Eléctricos IndustrialesDari EverandArmónicas en Sistemas Eléctricos IndustrialesPenilaian: 4.5 dari 5 bintang4.5/5 (12)
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDari EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaBelum ada peringkat
- Ejercicios de Integrales de Línea, Superficie y VolumenDari EverandEjercicios de Integrales de Línea, Superficie y VolumenPenilaian: 4 dari 5 bintang4/5 (2)
- Compraleapiura 17abr2020Dokumen39 halamanCompraleapiura 17abr2020Katheryn Mirella Moran NoleBelum ada peringkat
- FMD Brochure 2018Dokumen12 halamanFMD Brochure 2018Kenny Jiménez RuizBelum ada peringkat
- Flujo de Proceso de Secado y Puerto-2015Dokumen2 halamanFlujo de Proceso de Secado y Puerto-2015Kenny Jiménez RuizBelum ada peringkat
- 2000BY-E-60165 Rev 0Dokumen1 halaman2000BY-E-60165 Rev 0Kenny Jiménez RuizBelum ada peringkat
- Simulación y juegos empresarialesDokumen8 halamanSimulación y juegos empresarialesKenny Jiménez RuizBelum ada peringkat
- Anexo #06 Programa de Simulacros 2019Dokumen1 halamanAnexo #06 Programa de Simulacros 2019Kenny Jiménez RuizBelum ada peringkat
- Conceptos y Estilos de Liderazgo RecopilaciónDokumen34 halamanConceptos y Estilos de Liderazgo Recopilaciónshizo slan100% (1)
- 26.09.19 Observaciones Planeadas de Trabajo (Opt)Dokumen1 halaman26.09.19 Observaciones Planeadas de Trabajo (Opt)Kenny Jiménez RuizBelum ada peringkat
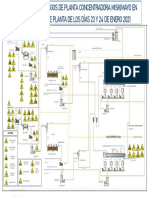
- Mapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Dokumen1 halamanMapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Kenny Jiménez RuizBelum ada peringkat
- Tareos 14.07.19Dokumen712 halamanTareos 14.07.19Kenny Jiménez RuizBelum ada peringkat
- Mapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Dokumen1 halamanMapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Kenny Jiménez RuizBelum ada peringkat
- PLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Dokumen26 halamanPLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Kenny Jiménez RuizBelum ada peringkat
- Platinas de Acero PDFDokumen1 halamanPlatinas de Acero PDFKenny Jiménez RuizBelum ada peringkat
- Situaccion de SaludDokumen12 halamanSituaccion de SaludKenny Jiménez RuizBelum ada peringkat
- AnemiaDokumen2 halamanAnemiaKenny Jiménez RuizBelum ada peringkat
- Documento Alcance Muestreo Relaves Rev 1Dokumen7 halamanDocumento Alcance Muestreo Relaves Rev 1Kenny Jiménez RuizBelum ada peringkat
- Tareo 31.08.2019Dokumen411 halamanTareo 31.08.2019Kenny Jiménez RuizBelum ada peringkat
- Levantamiento topográfico y toma de coordenadas en Las BambasDokumen21 halamanLevantamiento topográfico y toma de coordenadas en Las BambasKenny Jiménez RuizBelum ada peringkat
- Copia de 4 - Formato para Ingreso-Salida de PertenenciasDokumen2 halamanCopia de 4 - Formato para Ingreso-Salida de PertenenciasKenny Jiménez RuizBelum ada peringkat
- Levantamiento topográfico y toma de coordenadas en Las BambasDokumen21 halamanLevantamiento topográfico y toma de coordenadas en Las BambasKenny Jiménez RuizBelum ada peringkat
- Neupex PDFDokumen36 halamanNeupex PDFKenny Jiménez Ruiz100% (1)
- Trabajo Final BombasDokumen8 halamanTrabajo Final BombasKenny Jiménez RuizBelum ada peringkat
- Metrado de Barandas de TránsitoDokumen3 halamanMetrado de Barandas de TránsitoKenny Jiménez RuizBelum ada peringkat
- FISICADokumen10 halamanFISICAKenny Jiménez RuizBelum ada peringkat
- Cronograma Curso Febrero 2017Dokumen2 halamanCronograma Curso Febrero 2017Kenny Jiménez RuizBelum ada peringkat
- Calculo I Trabajo FinalDokumen36 halamanCalculo I Trabajo FinalKenny Jiménez RuizBelum ada peringkat
- Acta ReunionDokumen1 halamanActa ReunionKenny Jiménez RuizBelum ada peringkat
- Plan de Trabajo Kenny JiménezDokumen2 halamanPlan de Trabajo Kenny JiménezKenny Jiménez RuizBelum ada peringkat
- Word Examen - Jimenez RuizDokumen5 halamanWord Examen - Jimenez RuizKenny Jiménez RuizBelum ada peringkat
- Ejercicios2 Mate IIIDokumen1 halamanEjercicios2 Mate IIIKenny Jiménez RuizBelum ada peringkat
- Lista de Productos Siemens Bolivia 2020-E2 PDFDokumen120 halamanLista de Productos Siemens Bolivia 2020-E2 PDFMarco Antonio Quispe Roque100% (1)
- Rebobinado de Motores Electricos - Tarea 1 - Quesada Fasanando JohannesDokumen6 halamanRebobinado de Motores Electricos - Tarea 1 - Quesada Fasanando JohannesFranckehimer Johannes Quesada FasanandoBelum ada peringkat
- Practica 2 de Laboratorio - Control de Procesos IndustrialesDokumen10 halamanPractica 2 de Laboratorio - Control de Procesos Industrialesjames chavezBelum ada peringkat
- Procedimiento Instalacion de Pararrayos .CompressedDokumen7 halamanProcedimiento Instalacion de Pararrayos .Compresseddocumentossaf100% (2)
- Folleto Cursos Fronteras 2023 0Dokumen2 halamanFolleto Cursos Fronteras 2023 0ElyKarlaBelum ada peringkat
- Historia Del Telégrafo Código Morse ResúmenDokumen5 halamanHistoria Del Telégrafo Código Morse ResúmenIsaack ChakkyBelum ada peringkat
- Bibliografia TeslaDokumen1 halamanBibliografia TeslagiovannippgBelum ada peringkat
- Eficiencia-MotoresDokumen66 halamanEficiencia-MotoresOmar PerezjacoboBelum ada peringkat
- Aplicacion Con Amplificadores OperacionalesDokumen10 halamanAplicacion Con Amplificadores OperacionalesJ Diego CárdenasBelum ada peringkat
- Balastos HID para lámparas SON, HPI, MH y CDMDokumen2 halamanBalastos HID para lámparas SON, HPI, MH y CDMCarlos MejíaBelum ada peringkat
- Anillo ThomsonDokumen10 halamanAnillo ThomsonDavid Yaringaño RosalesBelum ada peringkat
- Informe 2 Electronicos 20.04Dokumen7 halamanInforme 2 Electronicos 20.04David IturriagaBelum ada peringkat
- T4 ElectromagnetismoDokumen20 halamanT4 ElectromagnetismoJulián Conde RojasBelum ada peringkat
- Circuitos Integrados. Mantenimiento Que Se Debe Llevar A Cabo en Sistemas de ControlDokumen11 halamanCircuitos Integrados. Mantenimiento Que Se Debe Llevar A Cabo en Sistemas de ControlPablo Azofeifa100% (1)
- Plan de Asignatura F Sica 11 2015 NuevoDokumen11 halamanPlan de Asignatura F Sica 11 2015 Nuevofacc27Belum ada peringkat
- Pc3 Bernaola A.EDokumen6 halamanPc3 Bernaola A.EBERNAOLA GASPAR CESAR ALFREDOBelum ada peringkat
- El Puente de WheatstoneDokumen5 halamanEl Puente de Wheatstonemichael yupanqui carhuanchoBelum ada peringkat
- Métodos Ópticos de AnálisisDokumen16 halamanMétodos Ópticos de AnálisisVanquelin89% (9)
- Proyecto Integrador Modulo 12 2023 (Fisica)Dokumen8 halamanProyecto Integrador Modulo 12 2023 (Fisica)Danny R.Belum ada peringkat
- Lab 1 ElpoDokumen56 halamanLab 1 ElpoNestor TiemposBelum ada peringkat
- P 3-3 Serie Industrial Tradicional GENERAL ELECTRICDokumen5 halamanP 3-3 Serie Industrial Tradicional GENERAL ELECTRICCarlos BuitragoBelum ada peringkat
- Condensadores y dieléctricos: energía electrostática y tiposDokumen36 halamanCondensadores y dieléctricos: energía electrostática y tiposgianBelum ada peringkat
- Dimensionamiento e instalación de conductores eléctricosDokumen31 halamanDimensionamiento e instalación de conductores eléctricosAnalia Yeruti GaleanoBelum ada peringkat
- Transformadores pad mountedDokumen2 halamanTransformadores pad mountedXavi LeonardoBelum ada peringkat
- Nombre de La Actividad: Redes Electricas: 1.1 Nombre Del Estudiante y GrupoDokumen20 halamanNombre de La Actividad: Redes Electricas: 1.1 Nombre Del Estudiante y GrupoHEBERTH MARTINEZBelum ada peringkat
- Modificaciones RetieDokumen22 halamanModificaciones RetieingenieroaggBelum ada peringkat
- Circuito RC: Medición de resistencia interna de voltímetroDokumen8 halamanCircuito RC: Medición de resistencia interna de voltímetroNicolas Sopo BobadillaBelum ada peringkat
- Exposicion A RadiacionesDokumen14 halamanExposicion A RadiacionesJ Ivan AcBelum ada peringkat
- Motor A Pasos en VHDLDokumen3 halamanMotor A Pasos en VHDLKevin Alan Sanchez Martinez0% (1)
- Los Factores Que Intervienen en Los Accidentes EléctricosDokumen6 halamanLos Factores Que Intervienen en Los Accidentes EléctricosPaula Andrea Jaime ValerianoBelum ada peringkat