Anda mungkin juga menyukai
- Power Geometry in Algebraic and Differential EquationsDari EverandPower Geometry in Algebraic and Differential EquationsBelum ada peringkat
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingDari EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingBelum ada peringkat
- Binder1 70 PDFDokumen1 halamanBinder1 70 PDFAbdul RahmanBelum ada peringkat
- ESLM SMO October 2017 PREPRINTDokumen27 halamanESLM SMO October 2017 PREPRINTalfreliaBelum ada peringkat
- 3 Continuous-Time Structural SystemsDokumen24 halaman3 Continuous-Time Structural SystemsstefanBelum ada peringkat
- Parameter Optimization of Tuned Mass Damper - Nguyen Van Khang, Nguyen Anh TuanDokumen1 halamanParameter Optimization of Tuned Mass Damper - Nguyen Van Khang, Nguyen Anh TuanRobert CardenasBelum ada peringkat
- Binder1 71 PDFDokumen1 halamanBinder1 71 PDFAbdul RahmanBelum ada peringkat
- Effects of Limits in Small Signal Stability Analysis of Power SystemsDokumen6 halamanEffects of Limits in Small Signal Stability Analysis of Power SystemsAshish DuttaBelum ada peringkat
- Dynamics Response Spectrum AnalysisDokumen33 halamanDynamics Response Spectrum AnalysisAhmed Gad100% (1)
- Engineering Optimization: Theory and Application: Brief IntroductionDokumen12 halamanEngineering Optimization: Theory and Application: Brief IntroductionSouravik DuttaBelum ada peringkat
- Effects of Particle Swarm Optimization Algorithm Parameters For Structural Dynamic Monitoring of Cantilever BeamDokumen7 halamanEffects of Particle Swarm Optimization Algorithm Parameters For Structural Dynamic Monitoring of Cantilever BeamFia PutriBelum ada peringkat
- LMI Approach To Robust Model Predictive Control: AbstractDokumen19 halamanLMI Approach To Robust Model Predictive Control: AbstractBalakrushna SahuBelum ada peringkat
- Binder1 73 PDFDokumen1 halamanBinder1 73 PDFAbdul RahmanBelum ada peringkat
- Using SDM To Train Neural Networks For Solving Modal Sensitivity ProblemsDokumen6 halamanUsing SDM To Train Neural Networks For Solving Modal Sensitivity Problemsho-faBelum ada peringkat
- A New Approach To Solve The of Maximum Constraint Satisfaction ProblemDokumen7 halamanA New Approach To Solve The of Maximum Constraint Satisfaction ProblemIAES IJAIBelum ada peringkat
- Dynamic Analysis of PipeDokumen11 halamanDynamic Analysis of PipeAshok KsBelum ada peringkat
- Nonlinear Control System Design by Quantifier Elimination: J. Symbolic Computation (1997) 24, 137-152Dokumen16 halamanNonlinear Control System Design by Quantifier Elimination: J. Symbolic Computation (1997) 24, 137-152Parti Ledger LBelum ada peringkat
- d1) 2DOF (Rev1)Dokumen44 halamand1) 2DOF (Rev1)chocsoftwareBelum ada peringkat
- Learning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output DataDokumen6 halamanLearning Reduced-Order Models of Quadratic Dynamical Systems From Input-Output Datasho bhaBelum ada peringkat
- TV 22 2015 6 1511 1516Dokumen6 halamanTV 22 2015 6 1511 1516Cleo RubinoBelum ada peringkat
- CAE TheoryDokumen30 halamanCAE TheorySuhas ShindeBelum ada peringkat
- Han LMI Struct Linear Cdc03Dokumen6 halamanHan LMI Struct Linear Cdc03Tensegrity WikiBelum ada peringkat
- Analysis of Statically Determinate Trusses Using Exact Method (Joint Resolution Method) and Matrix Stiffness MethodDokumen15 halamanAnalysis of Statically Determinate Trusses Using Exact Method (Joint Resolution Method) and Matrix Stiffness MethodClaudia RojasBelum ada peringkat
- Design of Robust Power System Stabilizer Based On Particle Swarm OptimizationDokumen8 halamanDesign of Robust Power System Stabilizer Based On Particle Swarm OptimizationFernando RamosBelum ada peringkat
- 1112012913dynamics Response Spectrum Analysis PDFDokumen33 halaman1112012913dynamics Response Spectrum Analysis PDFHectoreRodriguezlBelum ada peringkat
- Constrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsDokumen17 halamanConstrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsVenkatesh VarmaBelum ada peringkat
- Robust Linear Optimization With Recourse: Aur Elie Thiele, Tara Terry, and Marina Epelman March, 2010Dokumen29 halamanRobust Linear Optimization With Recourse: Aur Elie Thiele, Tara Terry, and Marina Epelman March, 2010Parthasarathi MondalBelum ada peringkat
- Hybrid Systems - TutorialDokumen66 halamanHybrid Systems - TutorialKarthik VazhuthiBelum ada peringkat
- Dynamics Response Spectrum Analysis - Shear Plane FrameDokumen35 halamanDynamics Response Spectrum Analysis - Shear Plane Frameamrsaleh999Belum ada peringkat
- Smoothing Methods Ss 3Dokumen6 halamanSmoothing Methods Ss 3abyss1988Belum ada peringkat
- Sensitivity 1Dokumen25 halamanSensitivity 1sumatrablackcoffee453Belum ada peringkat
- Physical Interpretation of Mode Shapes and Oscillations W - ExamplesDokumen9 halamanPhysical Interpretation of Mode Shapes and Oscillations W - ExamplesRicardo ColosimoBelum ada peringkat
- FE Notes CurrentDokumen6 halamanFE Notes Currentanon_688042049Belum ada peringkat
- Global Stiffness MatrixDokumen13 halamanGlobal Stiffness Matrixasfsaf0% (1)
- Chapter - 3 Optimal Power Flow Problem & Solution MethodologiesDokumen115 halamanChapter - 3 Optimal Power Flow Problem & Solution Methodologiesalkamishra1984Belum ada peringkat
- Mathematical Optimization: Keywords and Notation KeyDokumen62 halamanMathematical Optimization: Keywords and Notation KeyM Khahfi ZuhandaBelum ada peringkat
- 197601-Article Text-497670-1-10-20200716Dokumen12 halaman197601-Article Text-497670-1-10-20200716Khurram ShehzadBelum ada peringkat
- ASEN5022 Lecture 17Dokumen24 halamanASEN5022 Lecture 17Bryan Brian LamBelum ada peringkat
- Lecture Notes - MTH 208Dokumen43 halamanLecture Notes - MTH 208Amunnadi Victor chinazaBelum ada peringkat
- Linear-Quadratic Simultaneous Performance Design: Proceedings of The American Control Conference July 1997Dokumen5 halamanLinear-Quadratic Simultaneous Performance Design: Proceedings of The American Control Conference July 1997thirdsandwich3Belum ada peringkat
- Chapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversDokumen43 halamanChapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversjohnsmithiBelum ada peringkat
- Linear Feedback ControlDokumen14 halamanLinear Feedback ControlHung TuanBelum ada peringkat
- ACODS 2014 GAndradeDokumen7 halamanACODS 2014 GAndradesattanic666Belum ada peringkat
- GROneDokumen48 halamanGROneKernel5Belum ada peringkat
- Topology Optimisation Example NastranDokumen12 halamanTopology Optimisation Example Nastranjbcharpe100% (1)
- Dynamic Analysis of Beams by Using The Finite Element MethodDokumen6 halamanDynamic Analysis of Beams by Using The Finite Element MethodAkshay BuraBelum ada peringkat
- Describing Function Analysis of Systems With Impacts and BacklashDokumen16 halamanDescribing Function Analysis of Systems With Impacts and BacklashmustaafaaBelum ada peringkat
- Decoupling Strategy of Multi-Dimensional Force Sensor Based On LS-SVM and Th-Order Inverse System MethodDokumen4 halamanDecoupling Strategy of Multi-Dimensional Force Sensor Based On LS-SVM and Th-Order Inverse System MethodoksejenBelum ada peringkat
- SD 661 Home WorkDokumen11 halamanSD 661 Home Worksimon maaaklaBelum ada peringkat
- Analysis and Measurements - 036-114Dokumen79 halamanAnalysis and Measurements - 036-114김동은Belum ada peringkat
- Mechanical Vibration of Multiple Degrees of Freedom SystemsDokumen5 halamanMechanical Vibration of Multiple Degrees of Freedom SystemsChristopher YsitBelum ada peringkat
- IJCAS v2 n3 pp263-278Dokumen16 halamanIJCAS v2 n3 pp263-278xandercageBelum ada peringkat
- 2 Redundant Manipulators: Kinematic Analysis and Redundancy ResolutionDokumen27 halaman2 Redundant Manipulators: Kinematic Analysis and Redundancy ResolutionLitcanu AbelBelum ada peringkat
- 1 s2.0 002076839390023Z MainDokumen13 halaman1 s2.0 002076839390023Z Mainsuman.cenithBelum ada peringkat
- Beams and Framed Structures: Structures and Solid Body MechanicsDari EverandBeams and Framed Structures: Structures and Solid Body MechanicsPenilaian: 3 dari 5 bintang3/5 (2)
- Theory and Applications of the Empirical Valence Bond Approach: From Physical Chemistry to Chemical BiologyDari EverandTheory and Applications of the Empirical Valence Bond Approach: From Physical Chemistry to Chemical BiologyFernanda DuarteBelum ada peringkat
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsDari EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsBelum ada peringkat
- Difference Equations in Normed Spaces: Stability and OscillationsDari EverandDifference Equations in Normed Spaces: Stability and OscillationsBelum ada peringkat
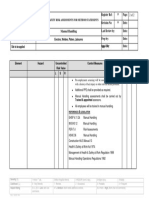
- 01 - Method Statements For Erection of Steel PDFDokumen1 halaman01 - Method Statements For Erection of Steel PDFAbdul RahmanBelum ada peringkat
- 58 - Method Statements For Erection of Steel PDFDokumen1 halaman58 - Method Statements For Erection of Steel PDFAbdul Rahman100% (1)
- 69 - Method Statements For Erection of Steel PDFDokumen1 halaman69 - Method Statements For Erection of Steel PDFAbdul RahmanBelum ada peringkat
- 54 - Method Statements For Erection of Steel PDFDokumen1 halaman54 - Method Statements For Erection of Steel PDFAbdul RahmanBelum ada peringkat
- 45 - Method Statements For Erection of Steel PDFDokumen1 halaman45 - Method Statements For Erection of Steel PDFAbdul RahmanBelum ada peringkat
- 41 - Method Statements For Erection of Steel PDFDokumen1 halaman41 - Method Statements For Erection of Steel PDFAbdul RahmanBelum ada peringkat
- 35 - Method Statements For Erection of Steel PDFDokumen1 halaman35 - Method Statements For Erection of Steel PDFAbdul RahmanBelum ada peringkat
- 10EE64 DIGITAL SIGNAL PROCESSING Syllabus PDFDokumen1 halaman10EE64 DIGITAL SIGNAL PROCESSING Syllabus PDFSunil PatilBelum ada peringkat
- Basic Process Control System Module (Revised)Dokumen8 halamanBasic Process Control System Module (Revised)Christy Jane SanchezBelum ada peringkat
- Implementation of Neural Network Back Propagation Training Algorithm On FPGADokumen19 halamanImplementation of Neural Network Back Propagation Training Algorithm On FPGAMix RuksinBelum ada peringkat
- IEC 61508 - Techniques and Measures - 1315236692 - 2 PDFDokumen3 halamanIEC 61508 - Techniques and Measures - 1315236692 - 2 PDFMichael AkpanBelum ada peringkat
- Schema R290Dokumen1 halamanSchema R290Kenosa100% (1)
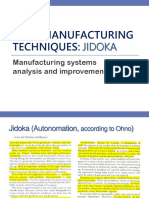
- MSAI 04 - JidokaDokumen44 halamanMSAI 04 - JidokaUlriksenBelum ada peringkat
- 1-2. AW 2024 Brochure (ENG)Dokumen12 halaman1-2. AW 2024 Brochure (ENG)Sandip JayBelum ada peringkat
- Chapter1 SQQP3033Dokumen32 halamanChapter1 SQQP3033Izaham ZinBelum ada peringkat
- Tourism Management Information A Web-Based SystemDokumen5 halamanTourism Management Information A Web-Based SystemJared MedioBelum ada peringkat
- of Modern Theories of ManagementDokumen29 halamanof Modern Theories of ManagementShristi ShreeBelum ada peringkat
- Assignment 3 EDODokumen14 halamanAssignment 3 EDOHunny VermaBelum ada peringkat
- ME375 Prelab 2Dokumen7 halamanME375 Prelab 2Jason LeeBelum ada peringkat
- Control System Teaching and Experiment Using LEGO Mindstorms NXT RobotDokumen5 halamanControl System Teaching and Experiment Using LEGO Mindstorms NXT Robotsivabharath44Belum ada peringkat
- New Century Wellness - Case 3Dokumen6 halamanNew Century Wellness - Case 3Ricardo Ferreira50% (2)
- Workflows in RUP PDFDokumen9 halamanWorkflows in RUP PDFDurval NetoBelum ada peringkat
- Day1 IntroDokumen13 halamanDay1 IntroDaniel FrancesBelum ada peringkat
- AIML Question Bank For Oral ExaminationDokumen3 halamanAIML Question Bank For Oral ExaminationDon pablo100% (1)
- Comp Root TransDokumen22 halamanComp Root TransEdhemBelum ada peringkat
- Talbi 2021Dokumen37 halamanTalbi 2021Khadija M.Belum ada peringkat
- BooksDokumen6 halamanBooksHabib FaridoonBelum ada peringkat
- P. Christopher Earley, Cristina B. Gibson - Multinational Work Teams - A New Perspective (Lea's Organization and Management Series) (2002)Dokumen349 halamanP. Christopher Earley, Cristina B. Gibson - Multinational Work Teams - A New Perspective (Lea's Organization and Management Series) (2002)Lina Licandra Huamaní DiazBelum ada peringkat
- Software Project Management: Pert/CpmDokumen14 halamanSoftware Project Management: Pert/CpmHemant SinghBelum ada peringkat
- Towards A Definition of Tourism, Tourist, and The Tourist IndustryDokumen18 halamanTowards A Definition of Tourism, Tourist, and The Tourist IndustryKimmy2010Belum ada peringkat
- CHAPTER 7 - ORGANIZATIONAL STRUCTURE AND DESIGN Multiple Choice QuestionsDokumen19 halamanCHAPTER 7 - ORGANIZATIONAL STRUCTURE AND DESIGN Multiple Choice QuestionsKAINAT MUSHTAQ83% (6)
- Chapter 2Dokumen31 halamanChapter 2RG310767% (3)
- RestaurantDokumen19 halamanRestaurantsaibabamb_hotmail100% (4)
- Top 30 Agile Testing Interview QuestionsDokumen19 halamanTop 30 Agile Testing Interview QuestionsabenezerBelum ada peringkat
- Data Flow Diagrams (DFDS) : Specific Instructional ObjectiveDokumen7 halamanData Flow Diagrams (DFDS) : Specific Instructional ObjectiveEE be happinessBelum ada peringkat
- Unit 2: Understanding Local NetworksDokumen12 halamanUnit 2: Understanding Local Networksglenn.tabucanonBelum ada peringkat