Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- SizingTransformers PDFDokumen1 halamanSizingTransformers PDFNaveen ReddyBelum ada peringkat
- SizingTransformers PDFDokumen1 halamanSizingTransformers PDFNaveen ReddyBelum ada peringkat
- What Is An Incremental Case?: Incremental Cases in PhdwinDokumen5 halamanWhat Is An Incremental Case?: Incremental Cases in PhdwinSSBelum ada peringkat
- Vertical Heater TreatersDokumen2 halamanVertical Heater TreatersSSBelum ada peringkat
- Dragon Standard Products Catalog by Size and Pressure 7 11 18Dokumen28 halamanDragon Standard Products Catalog by Size and Pressure 7 11 18SSBelum ada peringkat
- Continuing Education Program Activity Log Texas Board of Professional EngineersDokumen1 halamanContinuing Education Program Activity Log Texas Board of Professional EngineersSSBelum ada peringkat
- Service StandardsDokumen107 halamanService StandardsSSBelum ada peringkat
- Rod Pump Systems Brochure EnglishDokumen8 halamanRod Pump Systems Brochure EnglishJahangir MalikBelum ada peringkat
- SPE-184868-MS A Causation Investigation For Observed Casing Failures Occurring During Fracturing OperationsDokumen24 halamanSPE-184868-MS A Causation Investigation For Observed Casing Failures Occurring During Fracturing OperationsSSBelum ada peringkat
- Jert 135 1 013402Dokumen10 halamanJert 135 1 013402SSBelum ada peringkat
- Spe 184865 MSDokumen30 halamanSpe 184865 MSSSBelum ada peringkat
- Spe 184878 MSDokumen8 halamanSpe 184878 MSSSBelum ada peringkat
- Electrical Submersible PumpDokumen24 halamanElectrical Submersible PumpJorge Mártires100% (3)
- 1 IntroductionToArtificialLiftMethodsDokumen29 halaman1 IntroductionToArtificialLiftMethodsMahesh MahajanBelum ada peringkat
- SPE-184853-MS Smart Proppants With Multiple Down Hole FunctionalitiesDokumen11 halamanSPE-184853-MS Smart Proppants With Multiple Down Hole FunctionalitiesSSBelum ada peringkat
- Technical Data Book PDFDokumen79 halamanTechnical Data Book PDFRuth Santos NaranjoBelum ada peringkat
- FracproPT 2007 DocumentationDokumen945 halamanFracproPT 2007 Documentationore100% (1)
- Spe 175892 PaDokumen17 halamanSpe 175892 PaSSBelum ada peringkat
- SUPA 75® Slickline: UNS N08926Dokumen1 halamanSUPA 75® Slickline: UNS N08926SSBelum ada peringkat
- Spe 184867 MSDokumen13 halamanSpe 184867 MSSSBelum ada peringkat
- Spe 184871 MSDokumen27 halamanSpe 184871 MSSSBelum ada peringkat
- How A Well FlowsDokumen34 halamanHow A Well FlowsfddddddBelum ada peringkat
- Spe 184869 MSDokumen16 halamanSpe 184869 MSSS100% (1)
- SPE-184855-MS Application of Moving Reference Point MRP Method To Cotton Valley and Travis Peak Sand Fracturing TreatmentsDokumen12 halamanSPE-184855-MS Application of Moving Reference Point MRP Method To Cotton Valley and Travis Peak Sand Fracturing TreatmentsSSBelum ada peringkat
- SPE-184868-MS A Causation Investigation For Observed Casing Failures Occurring During Fracturing OperationsDokumen24 halamanSPE-184868-MS A Causation Investigation For Observed Casing Failures Occurring During Fracturing OperationsSSBelum ada peringkat
- Spe 184862 MSDokumen14 halamanSpe 184862 MSSSBelum ada peringkat
- Spe 184865 MSDokumen30 halamanSpe 184865 MSSSBelum ada peringkat
- Spe 184857 MSDokumen21 halamanSpe 184857 MSSSBelum ada peringkat
- Spe 184856 MSDokumen10 halamanSpe 184856 MSSSBelum ada peringkat
- Spe 184863 MSDokumen18 halamanSpe 184863 MSSSBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Why Coiled Tubing Fails and HowDokumen56 halamanWhy Coiled Tubing Fails and HowArdita S IrwanBelum ada peringkat
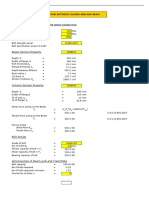
- Column Web and Beam Web BoltedDokumen5 halamanColumn Web and Beam Web BoltedGURUPRASAD SHETTY100% (1)
- Ceramics International: K. Priya, V.K. Ashith, Gowrish K. Rao, Ganesh SanjeevDokumen7 halamanCeramics International: K. Priya, V.K. Ashith, Gowrish K. Rao, Ganesh SanjeevPriya KagalagoduBelum ada peringkat
- Approximate Calculation of U-Shaped BellowsDokumen5 halamanApproximate Calculation of U-Shaped BellowsGicuBelum ada peringkat
- CUR Recommendation 102 - Inspection and Assessment of Concrete Structures in Which The Presence of ASR Is Suspected or Has Been EstablishedDokumen31 halamanCUR Recommendation 102 - Inspection and Assessment of Concrete Structures in Which The Presence of ASR Is Suspected or Has Been Establishedec02160Belum ada peringkat
- Polymers and Composite Materials: Review QuestionsDokumen8 halamanPolymers and Composite Materials: Review QuestionsKhaled ShaabanBelum ada peringkat
- Prestressed Concrete Design Lecture NotesDokumen52 halamanPrestressed Concrete Design Lecture NotesChristopher John Natividad100% (1)
- Principles of Polymer Chemistry by Paul J. FloryDokumen687 halamanPrinciples of Polymer Chemistry by Paul J. FloryKatipot Inkong83% (6)
- EG335 Notes Part 1 NewDokumen20 halamanEG335 Notes Part 1 NewAlan Kottommannil ThomsonBelum ada peringkat
- Aisi 1018 Carbon Steel (Uns g10180)Dokumen3 halamanAisi 1018 Carbon Steel (Uns g10180)Naman TanejaBelum ada peringkat
- Awc TR12 1510Dokumen36 halamanAwc TR12 1510Jelean NavalBelum ada peringkat
- Nonlinear FE Analysis 2009 1Dokumen40 halamanNonlinear FE Analysis 2009 1Venkata NarayanaBelum ada peringkat
- The Kinetics of Isothermal Martensitic Transformation of Zirconia Containing A Small Amount of YttriaDokumen7 halamanThe Kinetics of Isothermal Martensitic Transformation of Zirconia Containing A Small Amount of YttriaShameekaBelum ada peringkat
- Semiconductors Slide Chemistry 2 EsasDokumen19 halamanSemiconductors Slide Chemistry 2 EsasJfj ErthfBelum ada peringkat
- Module #6aDokumen17 halamanModule #6akamel touilebBelum ada peringkat
- Deform 2d v90 ManualDokumen305 halamanDeform 2d v90 ManualAman JainBelum ada peringkat
- Analysis of Plate Straightening ApproachesDokumen90 halamanAnalysis of Plate Straightening ApproachesPhạm Văn ĐảngBelum ada peringkat
- Bearing Failure AnalysisDokumen54 halamanBearing Failure AnalysisFaisal Tariq100% (2)
- Chapter-8 Engineering Failure AnalysisDokumen12 halamanChapter-8 Engineering Failure Analysissafeer ahmadBelum ada peringkat
- Introduction To NanotechnologyDokumen18 halamanIntroduction To NanotechnologyTushar PanditBelum ada peringkat
- Splice 03Dokumen15 halamanSplice 03LexBelum ada peringkat
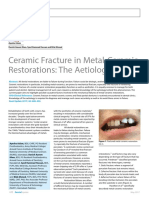
- Ceramic Fracture in Metal-Ceramic Restorations: The AetiologyDokumen6 halamanCeramic Fracture in Metal-Ceramic Restorations: The AetiologyQamar IshfaqueBelum ada peringkat
- Modulus of Elasticity of PVB-2Dokumen2 halamanModulus of Elasticity of PVB-2songyanxinBelum ada peringkat
- CompositeDokumen12 halamanCompositemissnovellaBelum ada peringkat
- Measurement: Anandraj Joseph, Girish M. JoshiDokumen5 halamanMeasurement: Anandraj Joseph, Girish M. Joshiapi-3852712Belum ada peringkat
- The Effect of Specimen Geometry On Tensile PropertDokumen6 halamanThe Effect of Specimen Geometry On Tensile PropertR JBelum ada peringkat
- Type of DamageDokumen3 halamanType of DamagehandokoBelum ada peringkat
- Steel Fiber-Reinforced Concrete Beams-Part II: Strength, Ductility, and DesignDokumen12 halamanSteel Fiber-Reinforced Concrete Beams-Part II: Strength, Ductility, and DesignzainabBelum ada peringkat
- The Effect of Successive Repairs On The 20150412101851 431297Dokumen7 halamanThe Effect of Successive Repairs On The 20150412101851 431297Menad SalahBelum ada peringkat
- Ndt/Nde: Non-Destructive Testing Services (NDT / NDE) in EdmontonDokumen2 halamanNdt/Nde: Non-Destructive Testing Services (NDT / NDE) in EdmontonBala VanBelum ada peringkat