Anda mungkin juga menyukai
- EigifpDokumen11 halamanEigifpSepliongBelum ada peringkat
- Matlab - How To Generate A Random Real Symmetric Square Matrix With Uniformly Distributed Entries - Stack OverflowDokumen2 halamanMatlab - How To Generate A Random Real Symmetric Square Matrix With Uniformly Distributed Entries - Stack OverflowSepliongBelum ada peringkat
- Sparse Solver For Large Symmetric Matrices - MATLAB Answers - MATLAB CentralDokumen2 halamanSparse Solver For Large Symmetric Matrices - MATLAB Answers - MATLAB CentralSepliongBelum ada peringkat
- Notes On The Symmetric QR Algorithm: 1 Subspace IterationDokumen21 halamanNotes On The Symmetric QR Algorithm: 1 Subspace IterationSepliongBelum ada peringkat
- Make An Existing Matrix Symmetric - MATLAB Answers - MATLAB CentralDokumen2 halamanMake An Existing Matrix Symmetric - MATLAB Answers - MATLAB CentralSepliongBelum ada peringkat
- Coldplay - Yellow - Kunci GitarDokumen4 halamanColdplay - Yellow - Kunci GitarSepliongBelum ada peringkat
- The Squared Unsymmetric Lanczos Method: Computer Science Department, University of Minnesota, Minneapolis, MNDokumen14 halamanThe Squared Unsymmetric Lanczos Method: Computer Science Department, University of Minnesota, Minneapolis, MNSepliongBelum ada peringkat
- 5 NumDokumen14 halaman5 NumSepliongBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Transverse Shear 1Dokumen48 halamanTransverse Shear 1Amira SyazanaBelum ada peringkat
- Biomechanics Analysis On RunningDokumen4 halamanBiomechanics Analysis On Runningshaon2k3Belum ada peringkat
- Chapter 4.4-Intermolecular ForcesDokumen3 halamanChapter 4.4-Intermolecular ForcesSupia NazmaBelum ada peringkat
- Cesium NumbersDokumen31 halamanCesium NumbersNicola BarrettBelum ada peringkat
- CSC273 Worksheet 1Dokumen4 halamanCSC273 Worksheet 1Admin BewBelum ada peringkat
- Law of mass action and carrier density in semiconductorsDokumen4 halamanLaw of mass action and carrier density in semiconductorskrishna gargBelum ada peringkat
- Instrumental Analysis Fundamentals of Electrochemistry TutorialDokumen16 halamanInstrumental Analysis Fundamentals of Electrochemistry TutorialSathya Raj100% (1)
- MSEP DatasheetDokumen2 halamanMSEP DatasheetSandi AslanBelum ada peringkat
- Che 131 Ps-Heat2Dokumen1 halamanChe 131 Ps-Heat2Jelor GallegoBelum ada peringkat
- Formulari Optica PDFDokumen2 halamanFormulari Optica PDFServandoBelum ada peringkat
- Birth and DeathDokumen3 halamanBirth and DeathPralin Ponnanakal PremachandranBelum ada peringkat
- Rock Typing Course GuideDokumen225 halamanRock Typing Course GuideMario Mallaviabarrena100% (4)
- CosolvancyDokumen6 halamanCosolvancyyashpandya01Belum ada peringkat
- How Can I Calculate The Wave Propagation Speed in A Copper WireDokumen3 halamanHow Can I Calculate The Wave Propagation Speed in A Copper WireJL1206Belum ada peringkat
- Fluid Mechanics Cengel (Solutions Manual) Chap11-001Dokumen21 halamanFluid Mechanics Cengel (Solutions Manual) Chap11-001NURUL SYUHADA BT ISMAIL HAJAR100% (3)
- NEO JEE 11 P1 PHY H Electric Charges and Fields 09 211Dokumen95 halamanNEO JEE 11 P1 PHY H Electric Charges and Fields 09 211annBelum ada peringkat
- Power TransformatorDokumen4 halamanPower Transformatorkrus100% (1)
- PUBLIC ADDRESS/PAGING SYSTEM SPEAKER PLACEMENT GUIDEDokumen58 halamanPUBLIC ADDRESS/PAGING SYSTEM SPEAKER PLACEMENT GUIDEdexterBelum ada peringkat
- Light Sensor (LDR) : Fig: LDR Symbol and SchematicDokumen3 halamanLight Sensor (LDR) : Fig: LDR Symbol and SchematicKarthik DmBelum ada peringkat
- General Information: Proximity SwitchesDokumen29 halamanGeneral Information: Proximity SwitchesA.K.A. HajiBelum ada peringkat
- Mechanism of Chip FormationDokumen4 halamanMechanism of Chip Formationakjeevanantham79Belum ada peringkat
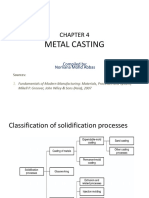
- Metal Casting: Compiled By: Norliana Mohd AbbasDokumen34 halamanMetal Casting: Compiled By: Norliana Mohd AbbasAziful AimanBelum ada peringkat
- Tcs 7PA26 - 27 - 30 - Catalog - SIP-2008 - en PDFDokumen7 halamanTcs 7PA26 - 27 - 30 - Catalog - SIP-2008 - en PDFBagus Permadi100% (1)
- Thermal RevisionanswersDokumen62 halamanThermal RevisionanswersLoraineBelum ada peringkat
- Introduction of Physics ElectronicsDokumen263 halamanIntroduction of Physics ElectronicsChayito HerreraBelum ada peringkat
- #MOCK JEE Main Practice Test 7 Thermodynamics & Heat TransferDokumen5 halaman#MOCK JEE Main Practice Test 7 Thermodynamics & Heat TransferApoorv TandonBelum ada peringkat
- DPP 1 SomDokumen2 halamanDPP 1 Somacharjeesneha68Belum ada peringkat
- Chemistry Midterm Practice TestDokumen24 halamanChemistry Midterm Practice TestClara BetancourBelum ada peringkat
- Physics Full Notes-1.pdf - Weighing Scale - Measurement - 1610006733827 PDFDokumen154 halamanPhysics Full Notes-1.pdf - Weighing Scale - Measurement - 1610006733827 PDFIlankunda filimonBelum ada peringkat
- Solid State ElectronicsDokumen41 halamanSolid State Electronicstaha khanBelum ada peringkat