Anda mungkin juga menyukai
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesDari EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesBelum ada peringkat
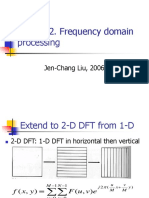
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Dokumen51 halamanChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirBelum ada peringkat
- Medical Image Processing (UBM1601) Unit - I Fundamentals of Medical Image Processing and TransformsDokumen21 halamanMedical Image Processing (UBM1601) Unit - I Fundamentals of Medical Image Processing and TransformsAnj AnandBelum ada peringkat
- Unit 2 (B)Dokumen72 halamanUnit 2 (B)Basavaraj ShellikeriBelum ada peringkat
- Image Enhancement in FrequencyDokumen61 halamanImage Enhancement in Frequencysaiankita anandBelum ada peringkat
- Digital Image Processing (Chapter 4)Dokumen62 halamanDigital Image Processing (Chapter 4)Md.Nazmul Abdal Shourov100% (1)
- Eng4Bf3 Medical Image Processing: Image Enhancement in Frequency DomainDokumen59 halamanEng4Bf3 Medical Image Processing: Image Enhancement in Frequency DomainparkumarBelum ada peringkat
- Fourier Transform: 1 D and 2 DDokumen35 halamanFourier Transform: 1 D and 2 Dwit12345Belum ada peringkat
- The Fourier Transform: Jean Baptiste Joseph FourierDokumen22 halamanThe Fourier Transform: Jean Baptiste Joseph FourierAbhinav_Batish_1810Belum ada peringkat
- Chapter 04Dokumen72 halamanChapter 04shvdoBelum ada peringkat
- Lec8 Discrete Fourier TransformDokumen28 halamanLec8 Discrete Fourier TransformIqrakhanBelum ada peringkat
- Image Enhance Frequency Domain StudentDokumen21 halamanImage Enhance Frequency Domain StudentShrijeet JainBelum ada peringkat
- L-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)Dokumen69 halamanL-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)career Point BastiBelum ada peringkat
- Chapter 5Dokumen49 halamanChapter 5SunnyBelum ada peringkat
- Image TransformsDokumen43 halamanImage TransformsHIMANI NARAIN HIMANI NARAINBelum ada peringkat
- Fourier 4Dokumen73 halamanFourier 4Duaa HusseinBelum ada peringkat
- L6 FourierDokumen38 halamanL6 FourierAgha KazimBelum ada peringkat
- FourierDokumen49 halamanFourierEl Pepe El PepeBelum ada peringkat
- Fourier TransformDokumen77 halamanFourier Transformtextile.km98Belum ada peringkat
- Transform OperationDokumen44 halamanTransform Operationsiavashmansoori1998Belum ada peringkat
- Image Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallDokumen72 halamanImage Processing Basics: Reference: Digital Image Processing', 2nd Edition, by Rafael Gonzalez. Prentice HallBEN AMARBelum ada peringkat
- 03 - Image TransformsDokumen9 halaman03 - Image TransformsrajendrasoloniBelum ada peringkat
- Block 2Dokumen95 halamanBlock 2Dhrubajit KashyapBelum ada peringkat
- 189 Sample-ChapterDokumen13 halaman189 Sample-ChapterMOHD ASIF ALIBelum ada peringkat
- Image Transform The Development of Two Dimensional (2-D) Transforms and Their PropertiesDokumen34 halamanImage Transform The Development of Two Dimensional (2-D) Transforms and Their PropertiesumasistaBelum ada peringkat
- Advanced Fourier Eng+ItaDokumen46 halamanAdvanced Fourier Eng+ItaLeonardo RubinoBelum ada peringkat
- Fourier Transforms PDFDokumen30 halamanFourier Transforms PDFKavibharath RBelum ada peringkat
- Department of Mathematics and Statistics University of Jaffna Classical Mechanics (AMM302G3)Dokumen10 halamanDepartment of Mathematics and Statistics University of Jaffna Classical Mechanics (AMM302G3)hujhihBelum ada peringkat
- EE-232 Signals & Systems: Fourier Transforms Properties & ExamplesDokumen14 halamanEE-232 Signals & Systems: Fourier Transforms Properties & ExamplesHaris AsifBelum ada peringkat
- Digital Image ProcessingDokumen94 halamanDigital Image Processinggirithik14Belum ada peringkat
- 8 - Image Transforms PDFDokumen85 halaman8 - Image Transforms PDFmanasiBelum ada peringkat
- 8 - Image Transforms PDFDokumen85 halaman8 - Image Transforms PDFmanasiBelum ada peringkat
- CS FourierDokumen23 halamanCS FourierMuhammad ArslanBelum ada peringkat
- Fourier Transform: Naveen SihagDokumen54 halamanFourier Transform: Naveen SihagDr. M. Karthigai Pandian Asso Prof ICEBelum ada peringkat
- DFT Sample Exam Problems SolutionsDokumen4 halamanDFT Sample Exam Problems SolutionsAnirban NeogiBelum ada peringkat
- Computer Vision: Spring 2012 15-385,-685 Instructor: S. Narasimhan Wean Hall 5409 T-R 10:30am - 11:50amDokumen37 halamanComputer Vision: Spring 2012 15-385,-685 Instructor: S. Narasimhan Wean Hall 5409 T-R 10:30am - 11:50amSatya NarayanaBelum ada peringkat
- Fourier Transform, in 1D and in 2DDokumen110 halamanFourier Transform, in 1D and in 2DMaram ShbairBelum ada peringkat
- Fourier Transform TransformationsDokumen25 halamanFourier Transform TransformationsSalahuddin JokhioBelum ada peringkat
- W12 - Fourier Transform (Part 3)Dokumen49 halamanW12 - Fourier Transform (Part 3)HermyraJ RobertBelum ada peringkat
- Power Electronics Notes by ArunkumarDokumen58 halamanPower Electronics Notes by ArunkumarVishwanath ShervegarBelum ada peringkat
- Image Filtering - 2Dokumen59 halamanImage Filtering - 2Jani Saida ShaikBelum ada peringkat
- L11 FourierPropertiesDokumen14 halamanL11 FourierPropertiesCanio NoceBelum ada peringkat
- Image Enhancement in The Frequency Domain: © 2002 R. C. Gonzalez & R. E. WoodsDokumen61 halamanImage Enhancement in The Frequency Domain: © 2002 R. C. Gonzalez & R. E. Woodsmajid jalilBelum ada peringkat
- Cursillo1 3Dokumen33 halamanCursillo1 3linacharryBelum ada peringkat
- Unit 4 Fourier Transforms Lecture Notes PDFDokumen30 halamanUnit 4 Fourier Transforms Lecture Notes PDFpoojaabanindran100% (1)
- Signals and Systems Laboratory 6:: Fourier Transform and PulsesDokumen9 halamanSignals and Systems Laboratory 6:: Fourier Transform and PulsesKthiha CnBelum ada peringkat
- NotesDokumen13 halamanNotesRitesh BagdiBelum ada peringkat
- Chapter 4 Image Enhancement in The Frequency DomainDokumen68 halamanChapter 4 Image Enhancement in The Frequency DomainILME AHMEDBelum ada peringkat
- 12 Fourier T XenDokumen129 halaman12 Fourier T Xenthuandvt97Belum ada peringkat
- Weighted Reference Shifted Phase Encoded Fringe Adjusted Joint Transform Correlator For Class Associative Multiple Target DetectionDokumen4 halamanWeighted Reference Shifted Phase Encoded Fringe Adjusted Joint Transform Correlator For Class Associative Multiple Target Detectionmunadil98Belum ada peringkat
- Frequeny Domain FilteringDokumen48 halamanFrequeny Domain FilteringabcBelum ada peringkat
- Equation List ExamDokumen5 halamanEquation List ExamTiagoBelum ada peringkat
- Fourier TransformDokumen45 halamanFourier TransformMarzan Samin AshrafiBelum ada peringkat
- Ece-Vii-Image Processing U3Dokumen7 halamanEce-Vii-Image Processing U32VD17EC 054Belum ada peringkat
- Notes 9Dokumen19 halamanNotes 9shaikhnida381Belum ada peringkat
- Fourier Trasnform Plus PropertiesDokumen69 halamanFourier Trasnform Plus Propertiesnehal hasnain refathBelum ada peringkat
- 06 SSA - CT Fourier TransformDokumen17 halaman06 SSA - CT Fourier TransformEssa Zulfikar SalasBelum ada peringkat
- Digital Image Processing: Lect #12Dokumen35 halamanDigital Image Processing: Lect #12nnehasinghBelum ada peringkat
- PHY431 Slides FourierTransforms OptionalReviewDokumen40 halamanPHY431 Slides FourierTransforms OptionalReviewjais yesudasBelum ada peringkat
- Spatial Filt+Frequency DomaingDokumen6 halamanSpatial Filt+Frequency DomaingSankalp_Kallakur_402Belum ada peringkat
- Image Compression 2Dokumen24 halamanImage Compression 2Sankalp_Kallakur_402Belum ada peringkat
- Image Compression: Sankalp KallakuriDokumen21 halamanImage Compression: Sankalp KallakuriSankalp_Kallakur_402Belum ada peringkat
- Frequency Domain Filtering Image ProcessingDokumen24 halamanFrequency Domain Filtering Image ProcessingSankalp_Kallakur_402100% (1)
- ESE558 Digital Image ProcessingDokumen28 halamanESE558 Digital Image ProcessingSankalp_Kallakur_402Belum ada peringkat
- Elwave ManualDokumen109 halamanElwave ManualNo Name100% (1)
- Python Function Question and Answers PDFDokumen25 halamanPython Function Question and Answers PDFRAJESHBelum ada peringkat
- Hathway BillDokumen1 halamanHathway BillSanthoshkumar.Jayaram (CareerNet)Belum ada peringkat
- Metron 05 C: Metal DetectorDokumen10 halamanMetron 05 C: Metal DetectorPavelBelum ada peringkat
- Using External Data Integration Services R12Dokumen89 halamanUsing External Data Integration Services R12Felipe GutiérrezBelum ada peringkat
- CommunityHelpersJobsProfessionsFlashcardsFREEFREEBIE 1 PDFDokumen27 halamanCommunityHelpersJobsProfessionsFlashcardsFREEFREEBIE 1 PDFLorena DominguezBelum ada peringkat
- Curriculum - RobochampsDokumen16 halamanCurriculum - RobochampsSarimBelum ada peringkat
- Learning SqlalchemyDokumen19 halamanLearning SqlalchemyPushkar DeyBelum ada peringkat
- Freebitco - in Script MULTIPLY BTC BONUS 2020Dokumen2 halamanFreebitco - in Script MULTIPLY BTC BONUS 2020Mohammadreza EmamiBelum ada peringkat
- Backing Up A Domain and Upgrading Weblogic ServerDokumen27 halamanBacking Up A Domain and Upgrading Weblogic ServerNetting NichoBelum ada peringkat
- CourseOfferingPlanGradF18 S20 20180106Dokumen9 halamanCourseOfferingPlanGradF18 S20 20180106Anshum PalBelum ada peringkat
- Letter of MotivationDokumen1 halamanLetter of Motivationhafiz muhammad zubair hafiz muhammad zubairBelum ada peringkat
- Benchmark - Big Haul Manual.1733Dokumen20 halamanBenchmark - Big Haul Manual.1733James GillenwaterBelum ada peringkat
- NEC2++: Numerical Electromagnetics CodeDokumen37 halamanNEC2++: Numerical Electromagnetics Codewangshu421Belum ada peringkat
- Latitude 9p0 Datasheet USDokumen2 halamanLatitude 9p0 Datasheet USGuillermo IbarraBelum ada peringkat
- Core Java Material 2Dokumen199 halamanCore Java Material 2raamsgoluguriBelum ada peringkat
- Lock RekeyingDokumen17 halamanLock RekeyingPrathusha RBelum ada peringkat
- Effects of Social Media PDFDokumen39 halamanEffects of Social Media PDFNur AdlinaBelum ada peringkat
- How To Install and Configure Oracle Golden GateDokumen12 halamanHow To Install and Configure Oracle Golden GatesadineniBelum ada peringkat
- ATM (Asynchronous Transfer Mode) Switching: Group 1Dokumen51 halamanATM (Asynchronous Transfer Mode) Switching: Group 1Faiza ShahBelum ada peringkat
- New Sorvall BP-Blood-Banking-BrochureDokumen13 halamanNew Sorvall BP-Blood-Banking-BrochureQBP. Luz GómezBelum ada peringkat
- "The World's Most Ornery Crossword," by Eric AlbertDokumen3 halaman"The World's Most Ornery Crossword," by Eric AlbertpspuzzlesBelum ada peringkat
- Fido Jan20 - 2023 2587774662Dokumen10 halamanFido Jan20 - 2023 2587774662Joel Paulose varghese100% (1)
- Frame DetailsDokumen15 halamanFrame DetailsDora BABelum ada peringkat
- MIT 18.05 Exam 1 SolutionsDokumen7 halamanMIT 18.05 Exam 1 SolutionsGoAwayScribdlolBelum ada peringkat
- Crash - Log - 2023 04 01 22 36 07Dokumen2 halamanCrash - Log - 2023 04 01 22 36 07Aizen HamburgerBelum ada peringkat
- Ubd Application in WellfloDokumen3 halamanUbd Application in WellfloAllan Troy SalazarBelum ada peringkat
- Mobius Industries Marketing CVDokumen2 halamanMobius Industries Marketing CVIssy TurtonBelum ada peringkat
- X BX+C 0: Quarter 1: SUMMATIVE TEST #1 (Quadratic Equation and Quadratic Inequality) Mathematics 9Dokumen3 halamanX BX+C 0: Quarter 1: SUMMATIVE TEST #1 (Quadratic Equation and Quadratic Inequality) Mathematics 9Guada LupeBelum ada peringkat