Anda mungkin juga menyukai
- Appendix A PDFDokumen20 halamanAppendix A PDFqaeszBelum ada peringkat
- Appendix CDokumen7 halamanAppendix Cqaesz63% (8)
- Midterm Exam ArchitectureDokumen2 halamanMidterm Exam ArchitectureSparśa RoychowdhuryBelum ada peringkat
- Edited Lab5 CodesDokumen19 halamanEdited Lab5 CodesAnurag SatpathyBelum ada peringkat
- Computer Architecture, A Quantitative Approach (Solution For 5th Edition)Dokumen91 halamanComputer Architecture, A Quantitative Approach (Solution For 5th Edition)Harish Athuru43% (7)
- Computer Architecture - Tutorial 1: Context, Objectives and OrganizationDokumen3 halamanComputer Architecture - Tutorial 1: Context, Objectives and OrganizationRahul pathakBelum ada peringkat
- FunctionDokumen11 halamanFunctionDrMahmoud AbbasBelum ada peringkat
- Homework 1 - Computer Architecture - HCMIUDokumen3 halamanHomework 1 - Computer Architecture - HCMIUJoeBelum ada peringkat
- Numerical: Central Processing UnitDokumen28 halamanNumerical: Central Processing UnityounisBelum ada peringkat
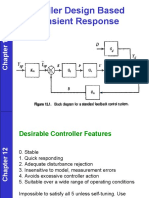
- Controller Design Based On Transient Response CriteriaDokumen45 halamanController Design Based On Transient Response CriteriaDEVI RAJENDRANBelum ada peringkat
- Wavelets and Wavelet Thresholding: 1.1 Exploiting Sample CorrelationsDokumen44 halamanWavelets and Wavelet Thresholding: 1.1 Exploiting Sample Correlationseeppwk100% (2)
- Che344 HW5 2019Dokumen6 halamanChe344 HW5 2019LynnBelum ada peringkat
- Modeling Fish Population Dynamics with Differential EquationsDokumen33 halamanModeling Fish Population Dynamics with Differential EquationsKarimPrinceAddoBelum ada peringkat
- Related To OptimizationDokumen42 halamanRelated To OptimizationAamir LokhandwalaBelum ada peringkat
- CFD Final ReportDokumen14 halamanCFD Final Reportdeniz ümit bayraktutarBelum ada peringkat
- Controller Design Based On Transient Response CriteriaDokumen45 halamanController Design Based On Transient Response Criteriameseret sisayBelum ada peringkat
- Department of Computer Science: Celestijnenlaan 200A (B-3001 Heverlee (Belgium)Dokumen38 halamanDepartment of Computer Science: Celestijnenlaan 200A (B-3001 Heverlee (Belgium)maheshnagarkarBelum ada peringkat
- Rates Matlab and Excel (Barlan)Dokumen11 halamanRates Matlab and Excel (Barlan)julien_barlanBelum ada peringkat
- Matlab and Ansys Programmes For MechanicalDokumen6 halamanMatlab and Ansys Programmes For MechanicalShalk GBelum ada peringkat
- Machine Learning by Tom Mitchell - DefinitionsDokumen12 halamanMachine Learning by Tom Mitchell - DefinitionsPonambalam VilashiniBelum ada peringkat
- Pricing Cat XLDokumen17 halamanPricing Cat XLKW SoldsBelum ada peringkat
- QUIZ 5 SolutionDokumen2 halamanQUIZ 5 SolutionyankevBelum ada peringkat
- A Brief Note On Inertia & Damping Coefficients: SEPTEMBER 20, 2018Dokumen6 halamanA Brief Note On Inertia & Damping Coefficients: SEPTEMBER 20, 2018alibbaaBelum ada peringkat
- Coa Viva QuestionsDokumen15 halamanCoa Viva QuestionsSaif100% (1)
- Revision Questions 2Dokumen4 halamanRevision Questions 2tinhtrilacBelum ada peringkat
- DSTWU - A Shortcut Distillation Model in Aspen Plus V8.0Dokumen11 halamanDSTWU - A Shortcut Distillation Model in Aspen Plus V8.0JúpiterBelum ada peringkat
- Advanced VHDL Features for Digital DesignDokumen4 halamanAdvanced VHDL Features for Digital DesignCharbel TadrosBelum ada peringkat
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFDokumen5 halamanSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFtargeties0% (1)
- Modified Lambda Tuning MethodDokumen3 halamanModified Lambda Tuning MethodUary Buza RegioBelum ada peringkat
- CEIC3006 Lab 2 ReportDokumen18 halamanCEIC3006 Lab 2 ReportAdzamBelum ada peringkat
- VTOL Lab Report PI Controller DesignDokumen7 halamanVTOL Lab Report PI Controller DesignubaidBelum ada peringkat
- 2005 Computer Architecture SolutionsDokumen11 halaman2005 Computer Architecture SolutionsomarBelum ada peringkat
- ICDM UpliftDokumen10 halamanICDM UpliftaliceecpknBelum ada peringkat
- MTO User GuideDokumen3 halamanMTO User Guideleonel TintayaBelum ada peringkat
- Pse Asia MarcelinoDokumen8 halamanPse Asia MarcelinoftmBelum ada peringkat
- OpenDSS Solution InterfaceDokumen8 halamanOpenDSS Solution InterfaceTerrorTricolorFCBelum ada peringkat
- Report On Code Usage Exercise For DEEPSOIL V2.5 (Installed On An XP Home Edition System)Dokumen12 halamanReport On Code Usage Exercise For DEEPSOIL V2.5 (Installed On An XP Home Edition System)hricha_20Belum ada peringkat
- Schedule PerformanceDokumen1 halamanSchedule PerformanceSucher EolasBelum ada peringkat
- 2020R1 FluentDokumen65 halaman2020R1 Fluentagrbovic100% (1)
- Newton-Raphson Method: Parallel Numerical Methods in FinanceDokumen15 halamanNewton-Raphson Method: Parallel Numerical Methods in FinanceAhmed adelBelum ada peringkat
- Cse590490 HW2Dokumen5 halamanCse590490 HW2Adip ChyBelum ada peringkat
- AircraftTrajectoryPlanning PDFDokumen8 halamanAircraftTrajectoryPlanning PDFCavemanGRBelum ada peringkat
- Event-Driven Models' Impact on TheoryDokumen3 halamanEvent-Driven Models' Impact on TheorygarthogBelum ada peringkat
- M116C 1 EE116C-Midterm2-w15 SolutionDokumen8 halamanM116C 1 EE116C-Midterm2-w15 Solutiontinhtrilac100% (1)
- Simplex Method: 4 Year - Report in Optimization TechniqueDokumen15 halamanSimplex Method: 4 Year - Report in Optimization TechniqueHaiderBelum ada peringkat
- agricolae tutorial histogram functionsDokumen88 halamanagricolae tutorial histogram functionsJAVIER DE LA HOZBelum ada peringkat
- Visualizing The MacCabe Thiele Diagram PDFDokumen9 halamanVisualizing The MacCabe Thiele Diagram PDFMayank SinhaBelum ada peringkat
- Aspen Tutorial #5: Sensitivity Analysis and Transport PropertiesDokumen13 halamanAspen Tutorial #5: Sensitivity Analysis and Transport Propertiesmajesty9Belum ada peringkat
- PISO vs. transient SIMPLE comparisonDokumen33 halamanPISO vs. transient SIMPLE comparisonMarceloBelum ada peringkat
- Unit 1 Divide-And-Conquer: Structure Page NosDokumen55 halamanUnit 1 Divide-And-Conquer: Structure Page NosRameshBelum ada peringkat
- Software Maintainability Assessment Based On Fuzzy Logic TechniqueDokumen5 halamanSoftware Maintainability Assessment Based On Fuzzy Logic TechniqueCristian Andrés AriasBelum ada peringkat
- Derivation 01Dokumen2 halamanDerivation 01mbmonvilleBelum ada peringkat
- Assignment 2Dokumen6 halamanAssignment 2Ruvenderan SuburamaniamBelum ada peringkat
- L07 OptimizationDokumen12 halamanL07 Optimizationparvathyp220246ecBelum ada peringkat
- Adaptive FemDokumen144 halamanAdaptive FemLivio German AguilarBelum ada peringkat
- CS601 - Machine Learning - Unit 2 - Notes - 1672759753Dokumen14 halamanCS601 - Machine Learning - Unit 2 - Notes - 1672759753mohit jaiswalBelum ada peringkat
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningDari EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningBelum ada peringkat
- Building Drift in ETABS: 1) Maximum LimitsDokumen7 halamanBuilding Drift in ETABS: 1) Maximum LimitsEngrDebashisMallickBelum ada peringkat
- Voice-over-IP Considered Harmful: Martin D'Souza, Tony Fernandez and Sicily MathewsDokumen4 halamanVoice-over-IP Considered Harmful: Martin D'Souza, Tony Fernandez and Sicily MathewsVinay Hari NathBelum ada peringkat
- HW Problems Chapter-1Dokumen3 halamanHW Problems Chapter-1William DoveBelum ada peringkat
- Always BlockDokumen6 halamanAlways BlockSaurabh NemaBelum ada peringkat
- EE660 Computer Architecture Pipeline DiagramsDokumen3 halamanEE660 Computer Architecture Pipeline Diagramsqaesz0% (1)
- P4V Cheat Sheet and Command ReferenceDokumen1 halamanP4V Cheat Sheet and Command Referencea6215470Belum ada peringkat
- Always BlockDokumen6 halamanAlways BlockSaurabh NemaBelum ada peringkat
- L12 - Out of Order Execution - NotesDokumen25 halamanL12 - Out of Order Execution - NotesqaeszBelum ada peringkat
- Ee660 2017 Spring Materials Week 01 AssgDokumen7 halamanEe660 2017 Spring Materials Week 01 AssgqaeszBelum ada peringkat
- QuestionsDokumen5 halamanQuestionsqaeszBelum ada peringkat
- ASICs by M J SmithDokumen1.179 halamanASICs by M J Smithsundeep_15291000100% (10)
- Assignment 2Dokumen3 halamanAssignment 2qaeszBelum ada peringkat
- Ee660 2017 Spring Materials Week 04 SlidesDokumen40 halamanEe660 2017 Spring Materials Week 04 SlidesqaeszBelum ada peringkat
- 20141222214053700Dokumen9 halaman20141222214053700qaeszBelum ada peringkat
- Appendix C PDFDokumen7 halamanAppendix C PDFqaesz0% (1)
- Appendix B SolutionDokumen9 halamanAppendix B Solutionebook_sandeep83% (6)
- Ee660 2017 Spring Materials Week 03 Slides BDokumen38 halamanEe660 2017 Spring Materials Week 03 Slides BqaeszBelum ada peringkat
- Appendix B SolutionDokumen9 halamanAppendix B Solutionebook_sandeep83% (6)
- Appendix B SolutionDokumen9 halamanAppendix B Solutionebook_sandeep83% (6)
- Dynamics of Protein and Mixed Protein Rsurfactant Adsorption Layers at The Water Rfluid InterfaceDokumen44 halamanDynamics of Protein and Mixed Protein Rsurfactant Adsorption Layers at The Water Rfluid InterfaceqaeszBelum ada peringkat
- Rheology of Interfacial LayersDokumen15 halamanRheology of Interfacial LayersqaeszBelum ada peringkat
- 1 s2.0 S1359029410000427 Main PDFDokumen12 halaman1 s2.0 S1359029410000427 Main PDFqaeszBelum ada peringkat
- 1 s2.0 S1359029497800489 Main PDFDokumen6 halaman1 s2.0 S1359029497800489 Main PDFqaeszBelum ada peringkat
- 1 s2.0 0927775795034927 Main PDFDokumen44 halaman1 s2.0 0927775795034927 Main PDFqaeszBelum ada peringkat
- 1 s2.0 S1359029414000855 Main PDFDokumen6 halaman1 s2.0 S1359029414000855 Main PDFqaeszBelum ada peringkat
- 1 s2.0 S0001868603000459 Main PDFDokumen27 halaman1 s2.0 S0001868603000459 Main PDFqaeszBelum ada peringkat
- 1 s2.0 S0040609095083421 Main PDFDokumen4 halaman1 s2.0 S0040609095083421 Main PDFqaeszBelum ada peringkat
- New Text DocumentDokumen1 halamanNew Text DocumentqaeszBelum ada peringkat
- How To Install Oracle On OpenSuSE 11Dokumen18 halamanHow To Install Oracle On OpenSuSE 11Wemerson CastroBelum ada peringkat
- Introduction to OR TechniquesDokumen20 halamanIntroduction to OR TechniquesirshadBelum ada peringkat
- SQL Answer Set-1 - BasasqlDokumen21 halamanSQL Answer Set-1 - Basasqlmohed ahmedBelum ada peringkat
- IBM Rational ClearQuest AdministrationDokumen40 halamanIBM Rational ClearQuest AdministrationmnreddyBelum ada peringkat
- Module 5 PDFDokumen15 halamanModule 5 PDFMamduh GhauriBelum ada peringkat
- ABAP INTERVIEW QUESTIONS AND ANSWERS GUIDEDokumen26 halamanABAP INTERVIEW QUESTIONS AND ANSWERS GUIDEmissliniusBelum ada peringkat
- Firwd Dan FirfsDokumen3 halamanFirwd Dan Firfssword of excaliburBelum ada peringkat
- NICE Error and Exception CodesDokumen15 halamanNICE Error and Exception Codesdoce1250% (2)
- GTU B.E. Sem-Vth Exam Dec 2010 Design & Analysis of AlgorithmsDokumen2 halamanGTU B.E. Sem-Vth Exam Dec 2010 Design & Analysis of AlgorithmsHarshang RanaBelum ada peringkat
- 16s PDFDokumen8 halaman16s PDFLawlietBelum ada peringkat
- Rekha Saripella - Radix and Bucket SortDokumen22 halamanRekha Saripella - Radix and Bucket SortAbdullah YousafzaiBelum ada peringkat
- Albert-Ludwigs-Universität, Freiburg Institut Fürinformatik: Internetworking Project Vlan Technology"Dokumen26 halamanAlbert-Ludwigs-Universität, Freiburg Institut Fürinformatik: Internetworking Project Vlan Technology"Ankita Agarwal100% (1)
- Emergent Dispatch Rider AbstractDokumen3 halamanEmergent Dispatch Rider AbstractTelika RamuBelum ada peringkat
- Halrefmancom - en USDokumen1.688 halamanHalrefmancom - en UStheimagingsourceBelum ada peringkat
- Business Continuity Plan Audit ChecklistDokumen2 halamanBusiness Continuity Plan Audit ChecklistAsim Amitav JenaBelum ada peringkat
- Mpc8349E Powerquicc™ Ii Pro Integrated Host Processor Hardware SpecificationsDokumen88 halamanMpc8349E Powerquicc™ Ii Pro Integrated Host Processor Hardware Specificationscatsoithahuong84Belum ada peringkat
- Az 900 PDFDokumen8 halamanAz 900 PDFRajesh WadhwaniBelum ada peringkat
- Course Outline 03-60-354Dokumen4 halamanCourse Outline 03-60-354Saiful Arefin MirpuriBelum ada peringkat
- Oracle Database 12c SQL exam questions and answersDokumen8 halamanOracle Database 12c SQL exam questions and answersmadhubanBelum ada peringkat
- Cybersecurity Survival GuideDokumen188 halamanCybersecurity Survival GuideJett PaglinawanBelum ada peringkat
- SNMP Centralized UPS monitoring softwareDokumen6 halamanSNMP Centralized UPS monitoring softwareThimal ManujayaBelum ada peringkat
- 2012 Midterm 1 Exam SolutionDokumen12 halaman2012 Midterm 1 Exam Solutionblizzard ZBelum ada peringkat
- CEH Module 21: Physical SecurityDokumen80 halamanCEH Module 21: Physical SecurityAhmad Mahmoud100% (1)
- Ebook Data ScienceDokumen48 halamanEbook Data ScienceArdian Syair100% (2)
- 7 Raster Structure PDFDokumen13 halaman7 Raster Structure PDFnickdash09Belum ada peringkat
- SAP EWM configuration essentialsDokumen6 halamanSAP EWM configuration essentialsWalid Amin MahmodBelum ada peringkat
- DGS-3630 Initial ConfigurationDokumen22 halamanDGS-3630 Initial Configurationrachit2712Belum ada peringkat
- HNMG1 CPP DumpDokumen202 halamanHNMG1 CPP DumpicecrackBelum ada peringkat
- AR File Creation StepsDokumen1 halamanAR File Creation StepssemajamesBelum ada peringkat