Anda mungkin juga menyukai
- Cotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsDokumen81 halamanCotation Fonctionnelle Selon Les Normes ISO: Méthode: Cotation en Localisation Avec Influence Des ContactsomatrBelum ada peringkat
- TD FinaleDokumen8 halamanTD Finalewass princeBelum ada peringkat
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDari EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysBelum ada peringkat
- TechnologieDokumen46 halamanTechnologieyacine100% (1)
- Cours Et TD Conception IIDokumen124 halamanCours Et TD Conception IIhocine gherbi100% (4)
- Chapitre 2 - Méca Transf de Mvts Par Syst Bielle ManivelleDokumen14 halamanChapitre 2 - Méca Transf de Mvts Par Syst Bielle Manivelleelking gingstarsBelum ada peringkat
- 2STM Eleve T1 PDFDokumen59 halaman2STM Eleve T1 PDFHanane TounsiBelum ada peringkat
- Construction MécaniqueDokumen70 halamanConstruction MécaniqueMohamed EddriefBelum ada peringkat
- Modélisation Cinématique Des MécanismesDokumen8 halamanModélisation Cinématique Des MécanismesConception & Fabrication MécaniqueBelum ada peringkat
- Cours Liaison EncastrementDokumen7 halamanCours Liaison EncastrementBIOS_012100% (2)
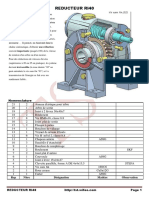
- REDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieDokumen6 halamanREDUCTEUR RI40. REDUCTEUR RI40 Page 1. Vis Sans Fin (03) Arbre Creux de SortieFabrigas Kasolo Kalala100% (1)
- Cours CM1 2014 2015Dokumen172 halamanCours CM1 2014 2015matozo100% (3)
- 40 DS Moulage 2016 2017Dokumen4 halaman40 DS Moulage 2016 2017Chokri Atef67% (3)
- Dossier de Technologie de Construction Mécanique 2Dokumen50 halamanDossier de Technologie de Construction Mécanique 2ahmed100% (2)
- Devoir de Maison Janvier 2021Dokumen17 halamanDevoir de Maison Janvier 2021soulaima khederBelum ada peringkat
- Travaux Pratiques Solid Works PDFDokumen22 halamanTravaux Pratiques Solid Works PDFchaudronnier100% (1)
- Technologie Generale Automatisme t1Dokumen10 halamanTechnologie Generale Automatisme t1Tafotchin KoneBelum ada peringkat
- Cours TE 1 Schematisation Cinematique CorrectionDokumen8 halamanCours TE 1 Schematisation Cinematique Correctionhanane hamidiBelum ada peringkat
- TD Bride HydrauliqueDokumen6 halamanTD Bride Hydrauliquekefnei89% (9)
- Polycopié Construction Mecanique 1Dokumen82 halamanPolycopié Construction Mecanique 1Sylia Boukhiar100% (1)
- Torsion 2020corrige FinalDokumen10 halamanTorsion 2020corrige Finalyasmine ben slimane100% (1)
- Omocn MTP06 PDFDokumen90 halamanOmocn MTP06 PDFBadr HadriBelum ada peringkat
- 01-Les Essais Mécaniques-Traction - ElèvesDokumen3 halaman01-Les Essais Mécaniques-Traction - ElèveskrommBelum ada peringkat
- FabricationMecaniqueS4LicenceGM PDFDokumen64 halamanFabricationMecaniqueS4LicenceGM PDFImap FinnBelum ada peringkat
- Dossier Réponse CorrigéDokumen5 halamanDossier Réponse CorrigéMrnadhir MecaniqueBelum ada peringkat
- Met T 25 TD PDokumen4 halamanMet T 25 TD Pkhocine67% (3)
- SciesauteusecorrectionDokumen3 halamanSciesauteusecorrectionyumiBelum ada peringkat
- Perceuse Sensitive Oyaka Nyemb Nyobe EbolembabgDokumen14 halamanPerceuse Sensitive Oyaka Nyemb Nyobe Ebolembabgngouo75% (4)
- Exercices de Filetage - eDokumen4 halamanExercices de Filetage - echrisBelum ada peringkat
- DPmecaniqueDokumen4 halamanDPmecaniquelou louBelum ada peringkat
- Transformation Des Mvts 10-11Dokumen4 halamanTransformation Des Mvts 10-11MIMFS100% (2)
- Exercice - RDM - Cisaillement - Clavette Motorducteur - EnoncDokumen4 halamanExercice - RDM - Cisaillement - Clavette Motorducteur - Enoncomar-benka-3821Belum ada peringkat
- Train ÉpicycloidalDokumen3 halamanTrain ÉpicycloidalAhmed Farahidi75% (4)
- TD Elaboration Des GammesDokumen9 halamanTD Elaboration Des GammesKhadija Labrizi100% (1)
- TD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleDokumen6 halamanTD 21 Corrigé - Loi E-S Pour Les Réducteurs Et Multiplicateurs de Vitesse À Train SimpleKhadija Labrizi80% (5)
- Elaborer Un Contrat de Phase Sur (01sciences - Com)Dokumen2 halamanElaborer Un Contrat de Phase Sur (01sciences - Com)Nedrosat87% (15)
- Examen Tech ProdDokumen8 halamanExamen Tech ProdSam DallaliBelum ada peringkat
- Fabrication Mecanique Cours PDFDokumen89 halamanFabrication Mecanique Cours PDFDeckard Regis Shaw100% (3)
- Série 01 Avec Solution TypeDokumen3 halamanSérie 01 Avec Solution Typenafaa_ali1375Belum ada peringkat
- TP - CAO-Solidworks BTSDokumen48 halamanTP - CAO-Solidworks BTSHafida EnnajiBelum ada peringkat
- Cours Liaison EncastrementDokumen12 halamanCours Liaison Encastrementsou souBelum ada peringkat
- TD 16 Corrigé - Liaisons - Schéma CinématiqueDokumen5 halamanTD 16 Corrigé - Liaisons - Schéma Cinématiquelfadli67% (3)
- Résumé TransmettreDokumen18 halamanRésumé TransmettreMehdi Ben Zouine100% (3)
- 2683 IE13 - SujetDokumen9 halaman2683 IE13 - SujetZakaria Bettioui100% (1)
- TD CompresseurDokumen11 halamanTD CompresseurSamba Sall100% (1)
- Usinage Par Enlevement de MatiereDokumen8 halamanUsinage Par Enlevement de Matieremaraghni_hassine7592Belum ada peringkat
- 31 EmbrayagesDokumen12 halaman31 EmbrayagesSimoMonkad100% (1)
- Fusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Dari EverandFusion 360 | étape par étape: Conception CAO, Simulation FEM & FAO pour les débutants.Belum ada peringkat
- Autodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsDari EverandAutodesk Inventor | étape par étape: Conception CAO et Simulation FEM avec Autodesk Inventor pour les DébutantsBelum ada peringkat
- Concept 2Dokumen0 halamanConcept 2Ben Aissa ChokriBelum ada peringkat
- 1 - La Scie SauteuseDokumen6 halaman1 - La Scie SauteuseClement Di LiegghioBelum ada peringkat
- Amcns-Devoir de Maison 2eme Tr3 CorrigerDokumen16 halamanAmcns-Devoir de Maison 2eme Tr3 Corrigersaded05Belum ada peringkat
- Lecture D'un Dessin D'ensembleDokumen4 halamanLecture D'un Dessin D'ensembleAlialitBelum ada peringkat
- Devoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFDokumen7 halamanDevoir de Synthèse N°1 - Génie Mécanique Cellule Flexible D'usinage - 3ème Technique (2015-2016) MR Mlaouhi Slaheddine PDFmohouchBelum ada peringkat
- Résumé-De-Cours Dessin D'ensembleDokumen9 halamanRésumé-De-Cours Dessin D'ensembleatika kabouyaBelum ada peringkat
- Dessin D'ensembleDokumen9 halamanDessin D'ensembleBouabdellaoui saif ennasr100% (1)
- DS1 1Dokumen11 halamanDS1 1Wissal GuilloulBelum ada peringkat
- Theme 15 Scie SauteuseDokumen5 halamanTheme 15 Scie SauteuseCasa Maestro100% (1)
- Ilovepdf - Merged (3) - RemovedDokumen12 halamanIlovepdf - Merged (3) - RemovedRémiBelum ada peringkat
- TP1Dokumen12 halamanTP1Firass ChafaiBelum ada peringkat
- TP AbaqusDokumen12 halamanTP AbaqusFirass Chafai100% (1)
- Effort de Coupe PDFDokumen2 halamanEffort de Coupe PDFFirass ChafaiBelum ada peringkat
- Exemple Sujet Expression Ecrite TCF PDFDokumen8 halamanExemple Sujet Expression Ecrite TCF PDFFirass Chafai100% (1)
- Test de Français InternationalDokumen188 halamanTest de Français InternationalMar Crespo100% (8)
- Rapport FinaleDokumen50 halamanRapport FinaleFirass ChafaiBelum ada peringkat
- PDF PDFDokumen45 halamanPDF PDFFirass ChafaiBelum ada peringkat
- PDFDokumen45 halamanPDFFirass Chafai100% (1)
- Transmission PDFDokumen28 halamanTransmission PDFFirass ChafaiBelum ada peringkat
- La Maintenance Industrielle WWW Cours-Electromecanique ComDokumen216 halamanLa Maintenance Industrielle WWW Cours-Electromecanique ComYounessElkarkouri0% (1)
- Transmission PDFDokumen28 halamanTransmission PDFFirass ChafaiBelum ada peringkat
- RadiographieDokumen41 halamanRadiographieFirass ChafaiBelum ada peringkat
- Transmission PDFDokumen28 halamanTransmission PDFFirass ChafaiBelum ada peringkat
- Les Courants de FoucaultDokumen26 halamanLes Courants de FoucaultFirass Chafai100% (1)
- Les UltrasonsDokumen31 halamanLes UltrasonsFirass Chafai100% (1)
- Sujet 1 PDFDokumen10 halamanSujet 1 PDFLarbi ElbakkaliBelum ada peringkat
- Sujet 1 PDFDokumen10 halamanSujet 1 PDFLarbi ElbakkaliBelum ada peringkat
- Chap1 Le RessuageDokumen20 halamanChap1 Le RessuageFirass ChafaiBelum ada peringkat
- La MagnétoscopieDokumen25 halamanLa MagnétoscopieFirass Chafai100% (3)
- Production AutomatiséeDokumen118 halamanProduction AutomatiséeFirass ChafaiBelum ada peringkat
- Cours Dessin TechniqueDokumen118 halamanCours Dessin TechniqueFirass Chafai75% (4)
- Cours Techniques de ProductionDokumen108 halamanCours Techniques de ProductionKOOBelum ada peringkat
- Ilnas-En Iso 4157-2:1998Dokumen4 halamanIlnas-En Iso 4157-2:1998Frank DongmoBelum ada peringkat
- Test 1Dokumen4 halamanTest 1Hicham BaghdadiBelum ada peringkat
- CIfjOLcAUyI Choix Cable HtaDokumen5 halamanCIfjOLcAUyI Choix Cable HtaHamza SrhBelum ada peringkat
- r5 03 21Dokumen16 halamanr5 03 21Yassine GharssalliBelum ada peringkat
- SUR-Flexyourte Juin15 LivretDokumen2 halamanSUR-Flexyourte Juin15 LivretOnanisław Spermacy WyfiutkiewiczBelum ada peringkat
- Plan D'etudes Seg Septembre 2014Dokumen334 halamanPlan D'etudes Seg Septembre 2014Karim Benaceur50% (2)
- Conception de La Comptabilit Analytique Pour Le Contrle de GestionDokumen56 halamanConception de La Comptabilit Analytique Pour Le Contrle de GestionSaid AgouzalBelum ada peringkat
- Chapitre II Référenciel Et Processus de Développement de L'innovation PDFDokumen74 halamanChapitre II Référenciel Et Processus de Développement de L'innovation PDFOmar 95Belum ada peringkat
- Exo Corrigé StratifiéeDokumen8 halamanExo Corrigé StratifiéeYounes Kader100% (2)
- Technique Beton Systemes de Levage Et D Ancrage Section 1Dokumen51 halamanTechnique Beton Systemes de Levage Et D Ancrage Section 1Nuno Telmo LopesBelum ada peringkat
- ST T61-L61Dokumen8 halamanST T61-L61mohamed0167Belum ada peringkat
- Sgeieg n96 5 Embauche Des Jeunes Cadres - Classement Des Formations 8-03-1996Dokumen12 halamanSgeieg n96 5 Embauche Des Jeunes Cadres - Classement Des Formations 8-03-1996Anonymous T23WzvtqBelum ada peringkat
- Amplificateur Large Bande Avec Cf739Dokumen13 halamanAmplificateur Large Bande Avec Cf739b33g33Belum ada peringkat
- Ciment Cem I 42.5 RDokumen2 halamanCiment Cem I 42.5 RENAENA187Belum ada peringkat
- Usb 6008Dokumen5 halamanUsb 6008Adil AbouelhassanBelum ada peringkat
- Amina Jouineh Pfe - Amina JouinehDokumen100 halamanAmina Jouineh Pfe - Amina Jouinehesfouna esfounaBelum ada peringkat
- 5eme Ci4 3 Ressource Les Types de PontsDokumen4 halaman5eme Ci4 3 Ressource Les Types de PontsjoelBelum ada peringkat
- Assurance Automobile: PropositionDokumen1 halamanAssurance Automobile: PropositionSiriki CoulibalyBelum ada peringkat
- Ancrage Des Accélérateurs en Tunnel PDFDokumen6 halamanAncrage Des Accélérateurs en Tunnel PDFKöksal PatanBelum ada peringkat
- Découpage Fonctionnel Sage 100c Gestion CommercialeDokumen4 halamanDécoupage Fonctionnel Sage 100c Gestion CommercialeKamal MefBelum ada peringkat
- Revetement Par Galvanisation A Chaud Sur Produits Finis FerreuxDokumen13 halamanRevetement Par Galvanisation A Chaud Sur Produits Finis FerreuxabdennacerBelum ada peringkat
- Brochure FR ADAX Advanced Distribution For Dynamics AX LightDokumen20 halamanBrochure FR ADAX Advanced Distribution For Dynamics AX LightKarim KarimBelum ada peringkat
- Les Services de La Logistique Au Maroc (V .F) - 1Dokumen32 halamanLes Services de La Logistique Au Maroc (V .F) - 1Allache AbderrahmanBelum ada peringkat
- C2 Méthodes de MaintenanceDokumen45 halamanC2 Méthodes de MaintenanceMohamed LemrabottBelum ada peringkat
- Cours de Gestion de Production La Méthode MRP. Said HAMICHI Professeur Gestion de Production - Supply Chain Management ERP - APSDokumen70 halamanCours de Gestion de Production La Méthode MRP. Said HAMICHI Professeur Gestion de Production - Supply Chain Management ERP - APSPhilippe VENARDBelum ada peringkat
- 01 - Brochure Saniclips (16 Pages) (1) - 69763Dokumen16 halaman01 - Brochure Saniclips (16 Pages) (1) - 69763Ziggy BussyBelum ada peringkat
- Manual Astra H 2010 FRDokumen282 halamanManual Astra H 2010 FRAbdel OubiBelum ada peringkat
- L'acrotéreDokumen9 halamanL'acrotéreAbdelali SolBelum ada peringkat
- Rapport de StageDokumen28 halamanRapport de StageKhouloud Aloui100% (1)
- 824ML 16778Dokumen196 halaman824ML 16778Abderrazak AwayagherBelum ada peringkat