Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Auditing RacfDokumen57 halamanAuditing Racfசிங்கார வேலன்Belum ada peringkat
- Hyundai Heavy Industries - Gas Insulated SwitchgearDokumen25 halamanHyundai Heavy Industries - Gas Insulated SwitchgearbadbenzationBelum ada peringkat
- Memristor Modeling in MATLAB®&SimulinkDokumen6 halamanMemristor Modeling in MATLAB®&Simulinkjoseamh69062247Belum ada peringkat
- Fundamentals of Rock MechanicsDokumen4 halamanFundamentals of Rock Mechanicsmaomao_vt890% (1)
- Glass & Glazing WorkDokumen34 halamanGlass & Glazing WorkPratik ThakkarBelum ada peringkat
- Fischer Technical Services Safety ManualDokumen15 halamanFischer Technical Services Safety ManualHenry FlorendoBelum ada peringkat
- CHEG320 Electrochemistry LecturesDokumen114 halamanCHEG320 Electrochemistry LecturesqalanisBelum ada peringkat
- The Flow Chart of Tires Pyrolysis EquipmentDokumen4 halamanThe Flow Chart of Tires Pyrolysis EquipmentpyrolysisoilBelum ada peringkat
- Beam DesignDokumen6 halamanBeam DesignrustamriyadiBelum ada peringkat
- Infobasic ProgrammingDokumen10 halamanInfobasic Programmingjaved73bdBelum ada peringkat
- Specification Sheets PDFDokumen6 halamanSpecification Sheets PDFVu TongBelum ada peringkat
- Lesson 5 T-BeamsDokumen7 halamanLesson 5 T-BeamsJoshua John JulioBelum ada peringkat
- 7 Basic Control ActionsDokumen27 halaman7 Basic Control ActionsAhmad ElsheemyBelum ada peringkat
- Heydar Aliyev Cultural Centre: StructureDokumen3 halamanHeydar Aliyev Cultural Centre: Structurenusha rakheBelum ada peringkat
- PC W130B 09 EUDokumen272 halamanPC W130B 09 EUОблачноBelum ada peringkat
- Esc101: Fundamentals of Computing: 2011-12-Monsoon SemesterDokumen6 halamanEsc101: Fundamentals of Computing: 2011-12-Monsoon SemesterMukesh Kumar DewraBelum ada peringkat
- XXX Lss XXX: NotesDokumen2 halamanXXX Lss XXX: NotesMoisés Vázquez ToledoBelum ada peringkat
- SEMIKRON Product Catalogue 2014 2015Dokumen167 halamanSEMIKRON Product Catalogue 2014 2015cesar oliveira0% (1)
- Control It: Hardware (Ac800 M/C) & SoftcontrollerDokumen74 halamanControl It: Hardware (Ac800 M/C) & SoftcontrollerDoc_LACBelum ada peringkat
- Gama Dimat Catalog Be17Dokumen16 halamanGama Dimat Catalog Be17ELMIR ADILBelum ada peringkat
- LG Rad 226B PDFDokumen65 halamanLG Rad 226B PDFFrancisReis0% (1)
- OurLocalExpert Exeter 2013-14Dokumen15 halamanOurLocalExpert Exeter 2013-14Nick HallBelum ada peringkat
- Industrial Engineering - Paradoxical Twins - Acme and Omega ElectronicsDokumen2 halamanIndustrial Engineering - Paradoxical Twins - Acme and Omega Electronicslollypop0606Belum ada peringkat
- Detailed Lesson Plan in IctDokumen4 halamanDetailed Lesson Plan in IctJai AidamusBelum ada peringkat
- Column Marking For G+4 Hostel Building: All Dimensions Are in MeterDokumen1 halamanColumn Marking For G+4 Hostel Building: All Dimensions Are in Metergowtham gowdaBelum ada peringkat
- 1188CK ExampleDokumen2 halaman1188CK ExampleYurii ChinovBelum ada peringkat
- Black SH e Ed Laser Ablation Effects and ApplicationsDokumen289 halamanBlack SH e Ed Laser Ablation Effects and ApplicationsMaxim KomarBelum ada peringkat
- SVT-RM10: Remote Control UnitDokumen2 halamanSVT-RM10: Remote Control UnitJOGITELEBelum ada peringkat
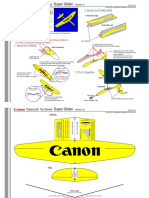
- Planeur Tres Simple PDFDokumen3 halamanPlaneur Tres Simple PDFAhmedBelum ada peringkat
- 130195mitsubishi ManualDokumen16 halaman130195mitsubishi ManualAbdul Noor KhanBelum ada peringkat