Anda mungkin juga menyukai
- Diseño A Cortante de Vigas de Concreto ArmadoDokumen20 halamanDiseño A Cortante de Vigas de Concreto Armadoscribenauta100% (6)
- Articulo Calixto GarmendiaDokumen1 halamanArticulo Calixto GarmendiaManuelFBEBelum ada peringkat
- Ensayos Con El AceroDokumen6 halamanEnsayos Con El AceroManuelFBEBelum ada peringkat
- ElectromagnetismoDokumen143 halamanElectromagnetismoManuelFBEBelum ada peringkat
- Informe de Tecnología de Materiales N°1Dokumen26 halamanInforme de Tecnología de Materiales N°1ManuelFBEBelum ada peringkat
- Movimiento Armonico Amortiguado de La BarraDokumen20 halamanMovimiento Armonico Amortiguado de La BarraManuelFBEBelum ada peringkat
- Sudoku ComplicadosDokumen15 halamanSudoku ComplicadosManuelFBE0% (1)
- Tecnologia Del Concreto PDFDokumen131 halamanTecnologia Del Concreto PDFAgustin DurónBelum ada peringkat
- Tareas de ComunicaciónDokumen86 halamanTareas de ComunicaciónManuelFBE0% (2)
- Libro Tareas de Matemáticas para ResolverDokumen112 halamanLibro Tareas de Matemáticas para ResolverManuelFBEBelum ada peringkat
- Quimica 2023 Editado Full HDDokumen653 halamanQuimica 2023 Editado Full HDBrayan YampierBelum ada peringkat
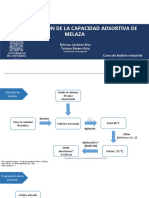
- Análisis Industrial-Procedimiento Indice de MelazaDokumen6 halamanAnálisis Industrial-Procedimiento Indice de MelazaMónica CardonaBelum ada peringkat
- C.D.T CosmologiaDokumen12 halamanC.D.T CosmologiaCristianBelum ada peringkat
- Estática de FluidosDokumen68 halamanEstática de FluidosJosue Alejandro Berdeal ZertucheBelum ada peringkat
- Laboratorio 07A Constante Elástica de Un Resorte Método CinéticoDokumen6 halamanLaboratorio 07A Constante Elástica de Un Resorte Método CinéticoAndres CampoBelum ada peringkat
- Caracteristicas de Los Materiales ConductoresDokumen7 halamanCaracteristicas de Los Materiales ConductoresKevin Williams Santos PonceBelum ada peringkat
- Tarea 2 - Unidad 2 - Dinámica y Energía.Dokumen12 halamanTarea 2 - Unidad 2 - Dinámica y Energía.KATHERYN ANDREA GUTIERREZ CASTAÑO100% (1)
- Canalizacion Pluvial D-6 SacabaDokumen17 halamanCanalizacion Pluvial D-6 Sacabajorge camposBelum ada peringkat
- Informe de Soldadura IEEEDokumen7 halamanInforme de Soldadura IEEEDiana Carolina Calero MillanBelum ada peringkat
- Propiedades de Los LíquidosDokumen13 halamanPropiedades de Los Líquidosmiguel123kBelum ada peringkat
- Fluidoterapia CrioterapiaDokumen2 halamanFluidoterapia Crioterapiaerika garciaBelum ada peringkat
- ExamenDokumen2 halamanExamenArmando Pulgar BenavidesBelum ada peringkat
- Taller Sociales Grado Cuarto, ESTRUCTURA (1) - Convertido (Reparado)Dokumen3 halamanTaller Sociales Grado Cuarto, ESTRUCTURA (1) - Convertido (Reparado)Cristian David Hernandez AteohortuaBelum ada peringkat
- Trabajo de BandasDokumen51 halamanTrabajo de BandasLubrication´s Room100% (3)
- Especificaciones TuberiaDokumen5 halamanEspecificaciones TuberiaYetchan QuiveBelum ada peringkat
- 04 - Seminario 4 2022-2023Dokumen1 halaman04 - Seminario 4 2022-2023promocion426.156Belum ada peringkat
- Propiedades - Antidesgaste - 2Dokumen18 halamanPropiedades - Antidesgaste - 2Julio Alberto CornejoBelum ada peringkat
- MetalografiaDokumen26 halamanMetalografiajohn haileBelum ada peringkat
- Desert d1Dokumen20 halamanDesert d12m2p8x9vjsBelum ada peringkat
- Fisica Módulo-01Dokumen24 halamanFisica Módulo-01DANIEL ALEJANDRO AMADO CALZADOBelum ada peringkat
- Informe Tecnico Estatica CablesDokumen14 halamanInforme Tecnico Estatica CablesKhenyi Clemente ChahuayoBelum ada peringkat
- DemostraciónDokumen2 halamanDemostraciónOmarBelum ada peringkat
- Unidad 4-GranulometríaDokumen24 halamanUnidad 4-GranulometríaArleyMartinezJaramilloBelum ada peringkat
- Problemas 3er ParcialDokumen1 halamanProblemas 3er Parcialjfaleman77Belum ada peringkat
- 2-2 - Propiedades Del Hormigón-Hormigones UAC - 2021Dokumen38 halaman2-2 - Propiedades Del Hormigón-Hormigones UAC - 2021Pedro GomezBelum ada peringkat
- QBX02 Química BásicaDokumen5 halamanQBX02 Química BásicaCorporacion Corfes Fortalecimiento EmpresarialBelum ada peringkat
- Operaciones 3Dokumen20 halamanOperaciones 3andresplataBelum ada peringkat
- Prueba Fisica Segundo Bachillerato La SalleDokumen2 halamanPrueba Fisica Segundo Bachillerato La SalleWaltherKarbBelum ada peringkat
- Separadores de ProduccionDokumen46 halamanSeparadores de ProduccionKroscop San Martin de LunaBelum ada peringkat